2. Устройство по п. 1, о т л ич а ю щ е е с я тем, что, с целью повышения надежности, датчик наличия скребков выполнен в виде светорассеивающей усеченной пирамиды, с меньшим основанием которой сочленены выходной торец осветительного и входной торец сигнального гибких волоконно-оптическик световодов, с яыходньи торцом последнего сочленен фотоприемник, причем входные концы осветительных гибких волоконно-оптических световодов всех датчиков собрали в общий жгут, перед торцом которого установлена инфракрасная лампа с рефлектором, при этом светорассеивающие пирамиды установлены на рабочей ветви конвейера большим основанием заподлицо с рештаком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой датчик производительности горной машины | 1981 |
|
SU956786A1 |
| Устройство для измерения и коррекции перекоса камеры судоподъемника | 1989 |
|
SU1735804A1 |
| Способ измерения подвигания подготовительного забоя (его варианты) и устройство для его осуществления | 1984 |
|
SU1209852A1 |
| Устройство для счета предметов, переносимых конвейером | 1989 |
|
SU1629914A1 |
| Устройство для счета предметов,перемещаемых конвейером | 1983 |
|
SU1095208A1 |
| Устройство для измерения площади непрозрачных плоских фигур | 1989 |
|
SU1663431A1 |
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1754593A1 |
| Устройство для счета предметов,переносимых конвейером | 1982 |
|
SU1072076A1 |
| Устройство для определения положения заготовок на поде кольцевой нагревательной печи | 1986 |
|
SU1406189A1 |
| Устройство для подсчета ящиков,перемещаемых конвейером | 1982 |
|
SU1056236A1 |
1.УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РАБОЧЕГО ОРГАНА СКРЕБКОВОГО КОНВЕЙЕРА, содержащее установленные на рабочей ветви конвейера пер- пендикулярно к продольной его оси первый и второй датчики наличия скребков, соединенньпс с блоком определения состояния рабочего органа, отличающееся тем, что, с целью повышения точности контроля , устройство снабжено третьим и четвертым датчиками наличия скребков, установленными параллельно первому и второму датчикам наличия скребков, и датчиком вращения приводной звездочки, а блок определения состояния рабочего органа вьшолнен на пяти блоках определения отношений, четьфех счетчиках, четырех счетных триггерах, двух элементах задержки, блоке сигнализации, бло- ке индикации, при этом выход первого блока определения отношений через первый счетный триггер соединен с суммирующим входом первого c4eT4iiKa, выход которого подключен к входу блока сигнализации, выходы второго и третьего блоков определения отношений соответственно через последовательно соединенные второй счетный триггер и первый элемент задержки и третий счетный триггер и второй элемент задержки соединены с вычитакшщм входом второго счетчика, суммирующий вход которого объединен с входом четвертого счетного триггера и подключен к выходу четвертого блока определения отношений , а выход - к первому входу пятого блока определения отношений Q 9 и к вычитающему входу первого счетчика, выход третьего счетчика сое(Л динен с управляющими входами второго и четвертого счетчиков, счетный вход последнего соединен с выходом четвертого счетного триггера, а выход - с вторым счетным входом пятого блока измерения отношений, выход которого подключен к входу блока индикации, при этом выход первоN0 го датчика наличия скребков подклю чен к одним из входов первого, третьего и четвертого блоков определеЕ О ния отношений, выход второго датчиt ка наличия скребков подключен к другому входу первого и одному из входов второго блоков определения отношений, выход третьего датчика наличия скребков подключен к другим входам второго и четвертого блоков определения отношений, выход четвертого датчика наличия скребков подключен к другому входу третьего блока определения отношений, причем датчик вращения приводной звездочки соединен с входом третьего счетчика.
Изобретение относится к горной автоматике, а более конкретно к автоматическому контролю работ.ы maxTHbix скребковых конвейеров, и может использоваться для контроля степени износа, поломки скребков и обрыва цепей скребкового конвейера;
Известно устройство для автоматического контроля целостности тяговой цепи, включаищее жестко закрепленный цилиндр с поршнем, шток которого соеда нен с тяговой цепьй, и датчик в котором штоковая полость цилиндра заполнена сжатым газом, а поршневая полость сообщена с атмосферой Hi 3.
Недостатком данного устройства является невозможность контроля с его помощью состояния скребков на цепном скребковом конвейере.
Наиболее близким к предлагаемому по технической сущности является устройство для автоматического контроля состояния рабочего органа скребкового койвейера, содержащее установленные на рабочей ветви конвейера на прямой, перпендикулярной к продольной оси конвейера, два датку«ка наличия скребков, соединенных с блоком определения состояния рабочего органа, состоящего из двух дифференцирующих двеньев двух усилителей-ограничителей,, элемента И, интегрирз кицего звена, одновибратора и выходного генератора {23.
Недостатком известного устройства являются низкие точность и надежность контроля, в связи с тем, что оио не позволяет вьщавать аварийный сигнал при прохождении первого же скребка с перекосом вьше Допустимого угла (или сломанного скребка). Кроме того, устройство не позволяет определить степень изношенности конвейера, а следовательно правильно регламентировать профилактические ремонты, что снижает надежность и срок службы конвейера.
К снижению надежности контроля приводит также его сложность (оно требует для использования еще достаточно сложного устройства - реле скорости). Кроме того, в известном устройстве при изменении стабильности датчиков появляются ложные сигналы, что также снижает надежность контроля состояния рабочего ; органа конвейера.
Цель изобретения - повьш1ение точности контроля и надежности.
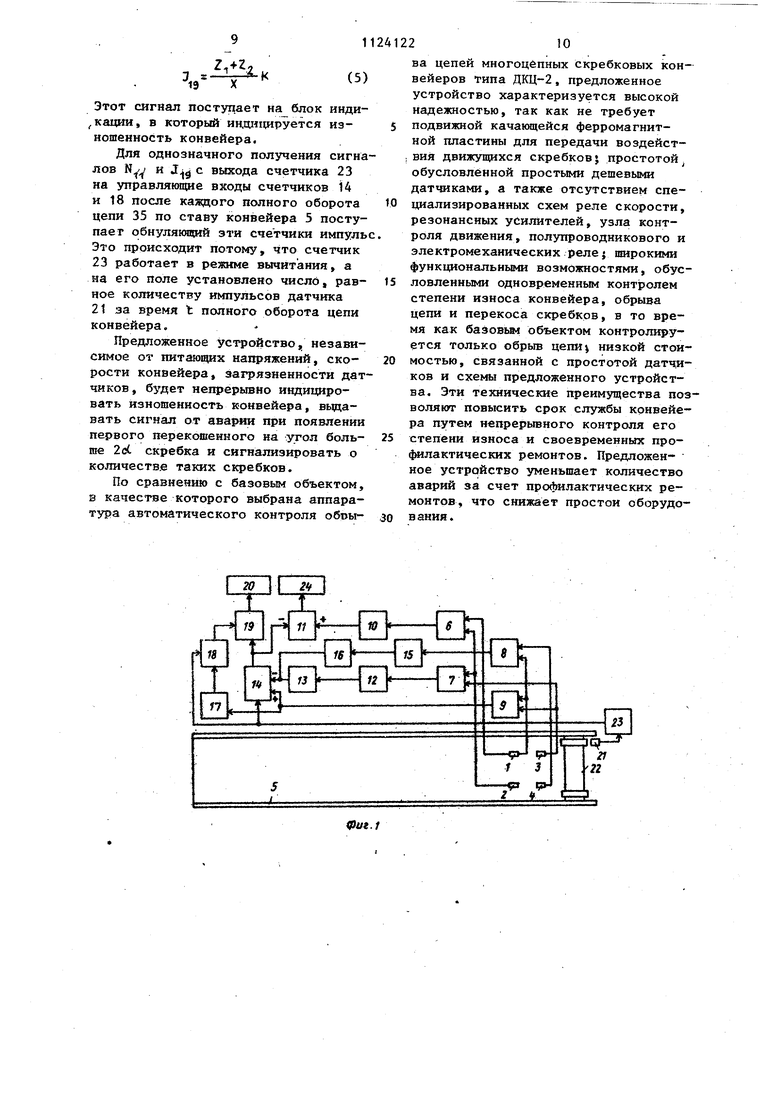
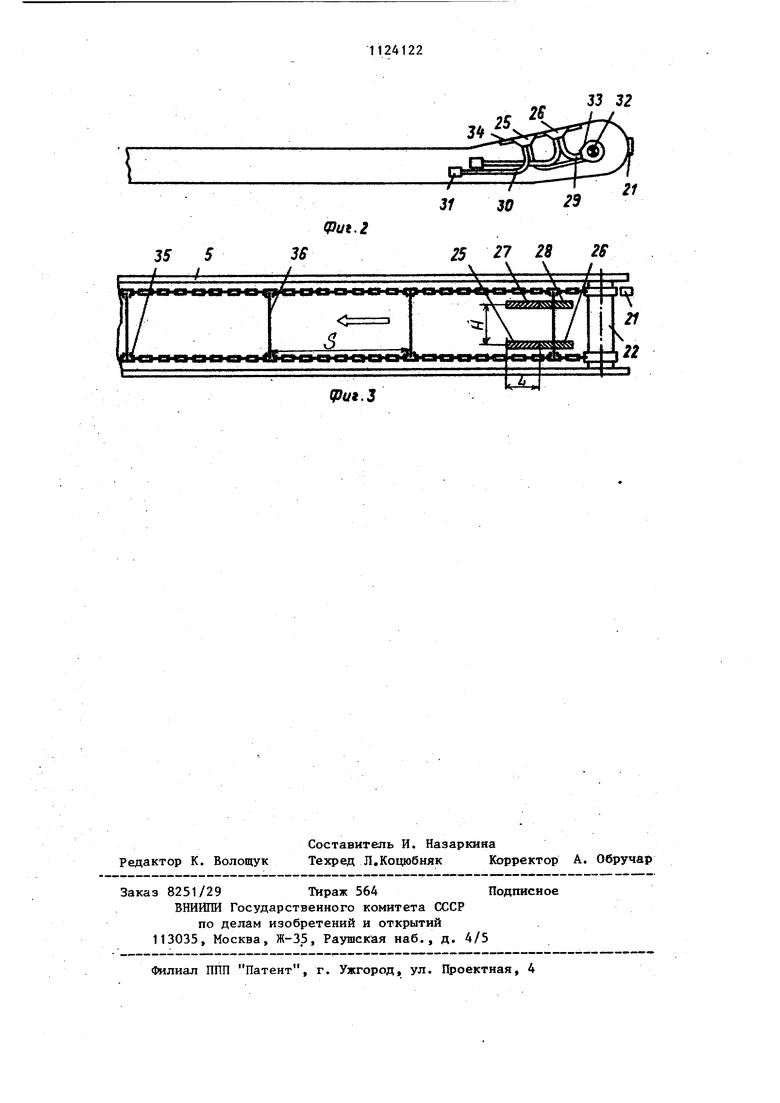
Поставленная цель достигается тем, что устройство для контроля состояния рабочего органа скребкового конвейера, содержащее установленные на рабочей ветви конвейера перпендикулярно к продольной его оси первый и второй датчики наличия скребков, соединенных с блоком определения состояния рабочего органа , устройство снабжено третьим и четвертым датчиками наличия скребков , установленными параллельно первому и второму датчикам наличия скребков, и датчиком вращения приводной звездочки, а блок определения состояния рабочего органа выполнен на пяти блоках определения отношений, четырех счетчиках, четырех счетных триггерах, двух злементах заде1Х Кки, блоке сигнализации, блоке индикации, при зтом выход пер3BOFo блока определения отношений через первый счетный триггер соеди нен с суммирующим входом первого счетчика, выход которого подключен к входу блока сигнализации, выходы второго и третьего блоков определения отношений соответствен но через по.следовятельно соединенные второй счетный триггер и первый элемент задержки и третий счет ный триггер и второй элемент задержки соединены с вычитающим входом второго счетчика, суммирующий вход которого объединен с входом четвертого счетного триггера и под ключен к выходу четвертого блока определения отношений, а выход к первому входу пятого блока определения отношений и к вычитающему входу первого счетчика, выход третьего счетчика соединен с управляю щими входами второго и четвертого счетчиков, счетный вход последнего соединен с выходом четвертого счет ного триггера, а выход - с вторым счетным входом пятого блока измере ния отнощений, выход которого подключен к входу блока индикации, при этом выход первого датчика нали чия скребков подключен к одним из входов первого, третьего и четвертого блоков определения отношений, выход второго датчика наличия скре ков подключен к другому входу первого и одному из входов второго бл ков определения отношений, выход тр тьего датчика наличия скребков под ключен к другим входам второго и четвертого блоков определения отно шений, выход че вертого датчика наттчяя скребков подключен к другому1- Ш у третьего блока определени .чй, причем датчик вращения пр111№Жой звездочки соединен с вхо дом г етьего счетчика. Для повьшения надежности датчик наличия скребков выполнен в виде св торассеивающей усеченной пирамиды, с меньшим основанием которой сочленены выходной торец осветительного и входной торец сигнального гибких волоконно-оптических световодов, с выходным торцом последнего сочленен фотоприемник, причем входные конадл осветительных гибких волоконно-оптических световодов всех датчиков собраны в общий жгут, перед торцом которого установлена инфракрасная 224 лампа с рефлектором, при этом светорассеивающие пирамиды установлены на рабочей ветви конвейера большим основанием заподлицо с рештаком. . 1 дана структурная схема устройства; на фиг. 2 - конструкция датчиков наличия скребков и их установка на рабочей ветви конвейера, вид сбокуI на фиг. 3 - то же, вид сверху. Устройство содержит четыре датчика наличия скребков 1-4, которые установлены на рабочей ветви конвейера 5. Выходы датчиков попарно соединены с входами четьфех блоков определения отношений 6-9: выход первого датчика 1 соединен с входами первого 6, третьего 8 и четвертого 9 блоков определения отношеНИИ; выход второго датчика 2-е входами первого 6 и второго 7 блоков определения отношений, выход третьего датчика 3-е входами второго 7 и четвертого 9 блоков определения отношений, выход четвертого датчика А - с входом третьего блока определения отношений 8. Выход первого блока определения отношений 6 соединен через первый счетный триггер 10 с суммирующим входом первого счетчика 11; выход второго блока определения отношений 7 через второй счетный триггер 12 и первый злемент задержки 13.подсоединен к вычитающему входу второго счетчика 14 j выход третьего блока определения отношений 8 через третий счетный триггер 15 и второй элемент задержки 16 соединен с вычитающим входом второго счетчика 14 выход четвертого блока определения отношений 9 соединен с суммируюдим входом второго счетчика 14 и с входом четвертого счетного триггера 17, выход которого соединен со счетHbw входом третьего счетчика 18. Выходы первого счетчика 11 и третьего счетчика 13 соединены с входами пятого блока определения отношений 19, выход которого соединен с входом блока ицдикации 20. Датчик 21 вращения приводной звездочки 22 соединен с входом четвертого счетчика 23, выход которого подключен к управляющим входам второго 14 и третьего 18 счетчиков. ыход первого счетчика 11 соединен с входом блока сигнализации 24. 51 Каждый датчик наличия скребков содержит усеченную пирамиду: на фиг. 2 видны усеченные пира:Миды 25 и 26, входящие в состав датчиков .2 и 4 соответственно, на фиг. 3 пирамида 25 датчика 2, пирамида 26 датчика 4, пирамида 27 датчика 1 и пирамида 28 датчика 3. С меньшими основаниями каждой из пирамид сочленены выходной торец осветител ного световода 29 и входной торец сигнального гибкого волоконно-оптического световода 30, с выходным торцом которого сочленен фотоприемник 31. Входные концы осветительных гиб1С1х волоконно-оптических световодов всех датчиков собра ны в общий жгут, перед торцом кото рого установлена инфракрасная лампа 32 с рефлектором 33. Светорассеиваквдие пирамиды уста новлены на рабочей ветви конвейера 5 большим основанием заподлицо с рештаком 34. Цепь конвейера 35 при водится в движение приводной звездочкой 22. К звеньям цепи 35 прикреплены скребки 36. Длина большого основания светорассвивающей усеченной пирамидй L и расстоякне межцу пирамидами и 3-4 датчиков (по прямым, перпендикулярным к продольной оси конвей ра) Н выбраны 3 соотношения -Ь--ч где f допустимый угол перекоса скребков для данного типа конвейера. Элементы задержки настраиваются на время задержки импульсов, выбранно из соотношения 5 У„... i V. (2) mtn где V. . и 7„„ - скорости соответ 1п1П , (CfX венно перегружен ного и холостого скребкового конвейера i S - шаг установки скребков. Работа устройства осуществляет следующим образом. В искодном состоянии счетчики 14 и 18 обнулены. Перед запуском устройства в работу на четвертом счетчике 23 устанавливают число. 6 равное количеству импульсов с датчика 21 за время полного оборота цепи по ставу конвейера. После запуска устройства в работу с датчика 21 на вычитающий вход четвертого счетчика 23 поступают импульсы, частота следования которых пропорциональна скорости вращения приводной звездочки 22. При работе конвейера приводная звездочка перемещает цепи 35 и скребки 36 в сторону, показанную сплошной линией с двойной стрелкой на фиг. 3. Пока скрёбки .36 перед большими основаниями светорассеивающих пирамид 25-28 отсутствуют , инфракрасные лучи от лампы 32 и рефлектора 33 попадают в осветительные световоды 29 и через . них в пирамиды 25-28 и затем выходят из них в окружающее пространство. Инфракрасные лучи, не находя препятствий перед большими основаниями пирамвд 25-28, не возвращаются больше в зти пирамиды, не входят в сигнальные световоды 30 и не попадают на фотоприемники 31. Если, например, перед большими основаниями пирамид 26 и 28 появляется неперекошенный скребок 36, то инфракрасные лучи, выйдя из пирамиды 26, частично рассеиваются скребком и снова возвращаются в пирамиду. При этом за время прохождения скребка перед большими основаниями пирамид 26 и 28 на выходах соответствующих фотоприемников 31 (или на выходах датчиков 3 и 4 в принятых на фиг. 1 обозначениях) появляется импульс электрического тока (напряжения). Каждьй проход неперекошенного скребка (с углом перекоса не больше fli.) сначала вызывает появление одновременных импульсов на выходах датчиков 3 и 4, а затем - на выходах датчиков 1 и 2. Если перед датчиками 1-4 проходит перекошенный вправо скребок с углом перекоса большее и меньше 2о1 , то импульсы появляются одновременно на выходах 2 и 3. Если же проходит перекошенный влево скребок с углом перекоса больше ai и меньше 2ci , то импульсы появляются одновременно на выходах датчиков 1 и 4. Если перед датчиками 1-4 проходит перекошенный вправо скребок с углом перекоса больше 2ot , то сначала появляется импульс на выходе датчика
4, после - на выходе датчика 2, затем - на выходе датчика 3 и посленим появляется импульс на выходе датчика 1,
При прохождении перед датчиками 1-4 перекошённого влево скребка с углом перекоса больше 2ot импульсы на выходах.датчиков появляются в поледовательности .
Таким образом, очередность появления импульсов на выходах датчиков 1-4 зависит от угла и направления перекоса скребка.
Для упрощения бписания работы устройства введем следуигаще обознач ния: X - общее количество скребков у из них yj - количество скребков, перекошенных вправо на угол не больше оС , УЛ количество скребков, перекошенных влево на угол не больше ai Z - количество скребков,, перекошенных вправо на угол от об до 2oi i Zi - количество скребков, перекошенных на угол от flt до 2 оС } у У Уу суммарное количество перекошенных скребков с допустимым углом перекоса.
При указанной последовательности появления импульсов с /Датчиков 1-4 на выходах измерителей отношений 6-9 будут формироваться следующие сигнальг: на выходе первого блока определения отношений 6 будет формироваться количество импульсов , равное удвоенному числу перекошенных (на угол больше ct ) скребков NJ - (у,. + у) (которые прошли за заданное время перед датчиками 1-4) , так как любой перекошенный на угол больше d скребок вызовет появление несовпадающих во времени импульсов на выходах датчиков 1 и 2 на выходе второго блока определения отношений 7 будет формироваться число импульсов, равное 2(Х - Z), так как любЪЙ скребок (кроме перекошенных на угол от оС до ) вызовет появление несовпадающих во времени импульсов на выходах датчиков 2 и 3j на выходе третьего блока определения отношений 8 формируется число импульсов, равное 2(Х - Z), так как любой скребок (кроме перекошенных влево на угол от о до 2с6) вызовет появление несовпадавщих во времейи на выходах датчиков 1 и 4; на выходе четвертого блока определения
отношений 9 формируется число импулсов, равное 2Х, так как проход любого скребка вызовет появление несовпадающих во времени импульсов на выходах датчиков 1 и 3.
При этом число импульсов на выходе первого счетного триггера 10 будет равно Х - (у число импульсов на выходе второго триггера 12 равно ХХ - Z,), число и myльсов на выходе третьего триггера 15 равно (X Zj), а число импульсов на выходе четвертого триггера 17 будет равно X, так как любой из зтих триггеров вьщает на выходе 1 импульс на каяздую пару поступивших на вход импульсов.
На суммирующем входе второго счетчика 14 будет формироваться число импульсов равное 2Х, а на. вычитащий его вход за время измерения с элементов задержки 16 и 13 поступит число импульсов (X - Z) + (X - Z,j На выход счетчика 14 поступит число импульсов
N 2Х -Г(Х - Z) + (X - Zj) Z + Z /. (3
На суммирующий вход первого счетчика 11 за время измерения с первого триггера 10 поступит число импульсов Х - (у + у) , а на вычитающий его вход с выхода счетчика 14 за это же время поступит число импульсов (Z + Z,). Поэтому на выход счетчика 11 поступит число импульсов
N Х- (У, УР - (Z,
+ Zpj(4)
численно равное количеству аварийных (перекошенных на угол большб 2d, или сломанных скребков). Это число импульсов поступят в блок сигнализации, который после поступления первого же импульса выдает аварийный сигнал (световой, звуковой и т.п.) и будет дальше сигнализировать о количестве аварийных скребков.
На выход четвертого счетчика 18 за время измерения t поступит число импульсов X, равное общему количеству скребков. Поэтому блок 19 определения отношений на своем выходе сформирует сигнал, пропорциональный процентному (относительному) содержандао скребков из .„их общего количества J s .. K 1Э X Этот сигнал поступает на блок инди кации, в который индицируется изношенность конвейера. Для однозначного получения сигна лов N и J с выхода счетчика 23 на управляющие вкоды счетчиков 14 и 18 после каждого полного оборота цепи 35 по ставу конвейера 5 поступает обнуляющий эти счетчики импуль Это происходит потому, что счетчик 23 работает в режиме вычитания а на его поле установлено число, равное количеству импульсов датчика 21 за время t полного оборота цепи конвейера. Предложенное устройство,, независимое от питающих напряжений, скорости конвейера, загрязненности дат чиков , будет нещ ерьшно индицировать изношенность конвейера, вьщавать сигнал от аварии при появлении первого перекошенного на угол больше 2сС скребка и сигнализировать о количестве таких скребков. По сравнению с базовым объектом, и качестве которого выбрана аппаратура автоматического контроля обоыГа Г (5) ва цепей многоценных скребковых кон- вейеров типа ДКЦ-2, предложенное устройство характеризуется вьюокой надежностью, так как не требует подвижной качакнцейся ферромагнитной пластины для передачи воздейстВИЯ движущихся скребков простотой, обусловленной простыми дешевыми датчиками, а также отсутствием специализированных схем реле скорости, резонансных усилителей, узла контроля движения, полупроводникового и электромеханических реле j широкими функциональными возможностями, обусловленными одновременным контролем степени износа конвейера, обрыва цепи и перекоса скребков, в то время как базовьм объектом контролируется только обрыв цепи низкой стоимостью, связанной с простотой датчиков и схемы предложенного устройства. Эти технические преимущества позволяют повысить срок службы конвейера путем непрерывного контроля его степени износа и своевременных профилактических ремонтов. Предложенное устройство уменьшает количество аварий за счет профилактических ремонтов, что снижает простои оборудов ания.
Фиг. 2 Vut.3
33 32
2S
J-
31 30 25 27 28
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство автоматического контроля целостности тяговой цепи горной машины | 1977 |
|
SU609890A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Голпежников Л.И | |||
| Автоматизация подземных горных работ | |||
| М., Недра, 1976, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
