Изобретение относится к машиностроению и может использоваться в станкостроении, например, для робототехники в качестве раздвижной руки (сустава), в радиотехнике, например для стойки антенны, в судостроении, например, в качестве выдвижного элемента мягкой стыковки причали- ваюш,их устройств и т. д.
Целью изобретения является расширение функциональных возможностей путем обеспечения промежуточного положения штанги.
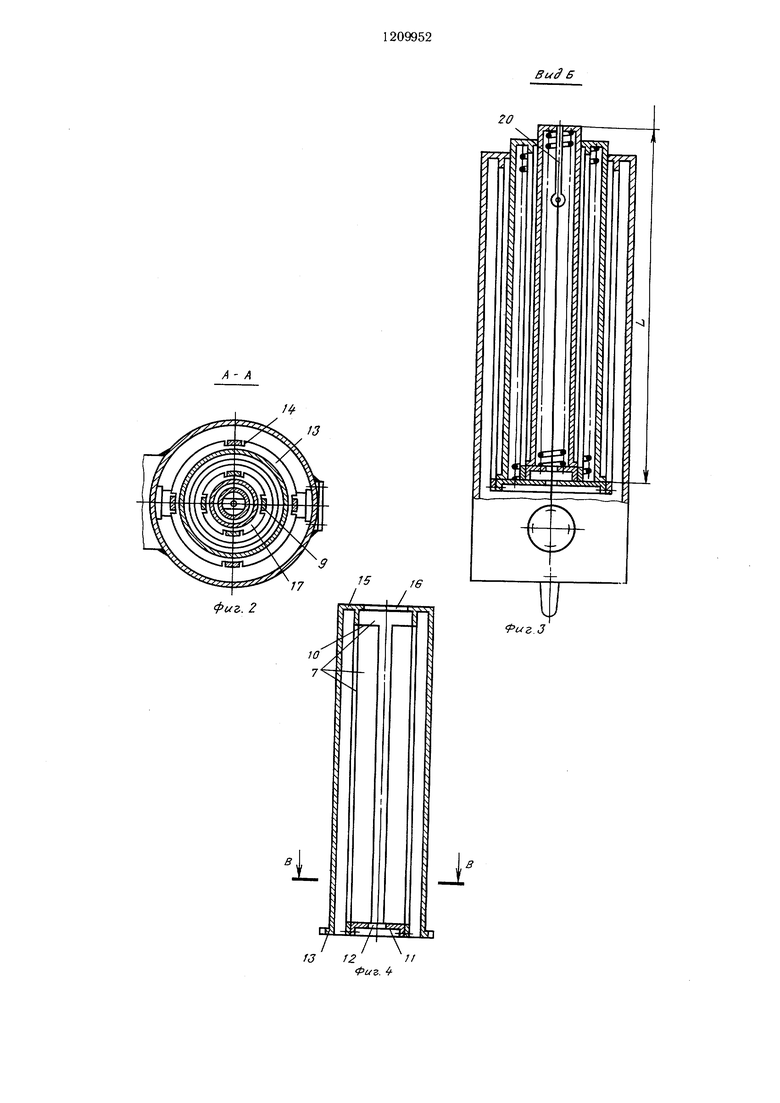
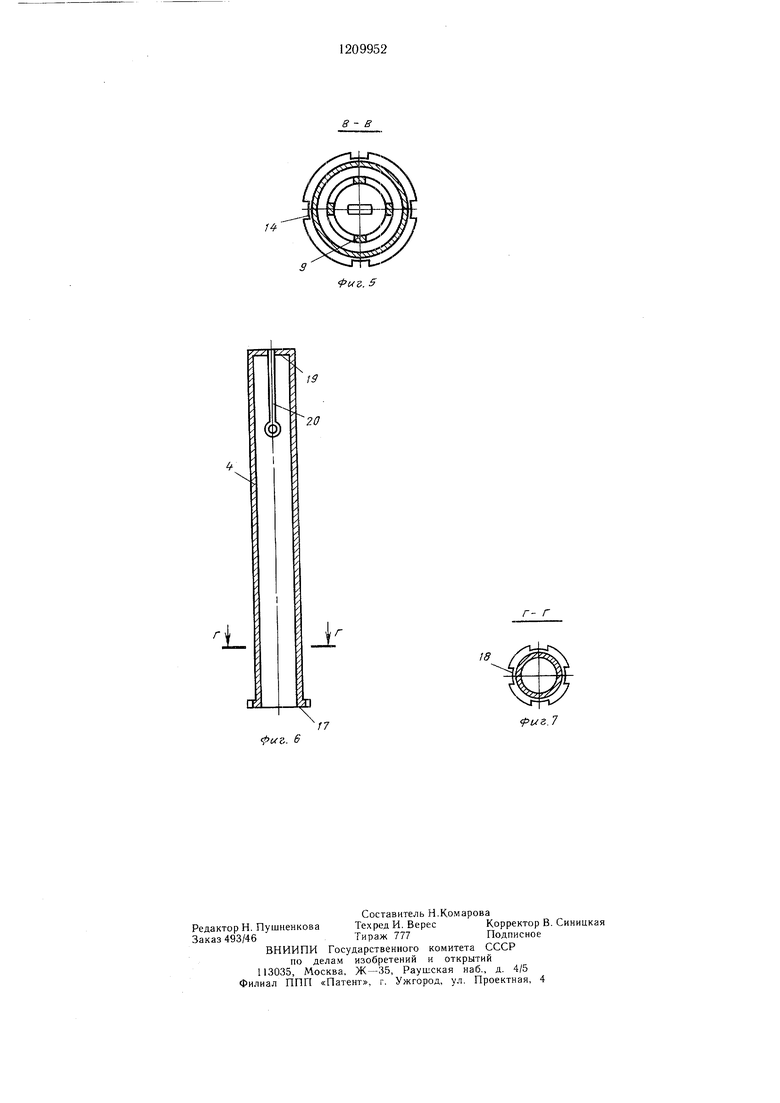
На фиг. 1 изображено не полностью раздвинутое телескопическое соединение, об- Ш.ИЙ вид; на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - вид Б на фиг. 1 (с частичным вырывом); на фиг. 4 - промежуточная выдвижная секция; на фиг. 5 - разрез В-В на фиг. 4; на фиг. б - последняя выдвижная секция; на фиг. 7 - разрез Г-Г на фиг. 6.
Соединение содержит корпус 1, установленный на подвижном транспортном агрегате 2.
Корпус содержит телескопические выдвижные секции, состояш,ие из промежуточных выдвижных секций 3 и внутренней выдвижной секции 4. В каждой секции установлен упругий привод перемеш.ения, выполненный Б виде отдельных пружинных приводов 5 и 6. Такое конструктивное выполнение обеспечивает выдвижение, например.
10
15
20
25
проходящей через окна 12 и соединен«ой с механизмо.м 22 управления пружинными приводами 5 и 6. Механизм управления установлен в корпусе и снабжен устройством 23 разворота, имеющим стопор 24, и ручкой 25 с. фиксатором 26.
Соединение работает следующим образом.
После прибытия транспорт юго агрегата 2 к месту использования телескопической мачты она разворачивается в рабочее положение. Для этого стопор 24 выводится из гнезда, устройством разворота 23 корпус 1 устанавливается в необходимое положение (на какой-то угол или вертикально). Стопор 24 вводится в соответствующее гнездо (не показано). Далее фиксатор 26 выводится из своего отверстия, и ручкой 25 приводится во вращение механизм 22 управления, при этом ослабляется гибкая тяга 21. Пружинные приводы 5 и 6 энергией сжатия начинают распрямляться, увеличиваясь в длину выдвигая секции 3 и 4 от исходного размера L до L , при этом размеры 1 и 1| изменяются. По мере достижения необходимой длины выдвижения мачты фиксатор 26 вводится в ближайшее отверстие, и выдвижение секции мачты прекращается, так как гибкая тяга (например, трос), связанная с проущиной 20 через донышко 19, не дает перемещаться внутренней секции 4, а возможное перемещемачты, на большую длину при меньших Q ние промежуточной секции 3 осуществляется
до момента выравнивания энергии и сжатия в пружинных приводах 5 и 6. Максимальное выдвижение секции при необходимости осуществляется до подхода буртов 13 и 17 к упорам 10. Таким образом
исходных габаритах, кроме того, пружинные приводы короче по длине и имеют меньшую жесткость. Корпус и выдвижные секции выполнены в виде стаканов с двойными стенками 7 и 8. На внутренней стенке 7
образованы направляющие 9 и упор 10 для 35 осуществляется выдвижение в рабочее поло- исключения разворота секции, устой чивость мачте при выдвижении. На внутренней стенке имеется нижнее съемное дниш.е 11 с окном 12. В нижней части наружной стенки 8 стакана имеется бурт 13 с прорезяжение мачты.
Конструкция мачты телескопической обеспечивает расширение технических возможностей путем увеличения длины выдвижения при одновременном уменьщении мощности
14, взаимодействующими с направляю- 40 привода, которая заключается в следуюми
щими, а в верхнем днище 15 выполнено окно 16 для прохода другой секции. Между стенками и днищами установлены пружинные приводы, при этом стенки придают устойчивость приводам. Внутренняя выдвижная секция 4 выполнена в виде стакана, в нижней части стенки имеется наружный бурт 17 с прорезями 18 для взаимодействия с направляющими, внутри донышка 19 секции выполнена проушина 20 для гибкой тяги 21,
щем:
обеспечивается выдвижение мачты на любую длину в пределах L до L j {макс,
исключается потребление энергии (элек- трической, пневматической, гидравлической и т. д.), что очень важно в полевых и экстремальных условиях;
обеспечивается простота конструкции и мягкость подвода последней секции к объекту.
0
5
0
5
проходящей через окна 12 и соединен«ой с механизмо.м 22 управления пружинными приводами 5 и 6. Механизм управления установлен в корпусе и снабжен устройством 23 разворота, имеющим стопор 24, и ручкой 25 с. фиксатором 26.
Соединение работает следующим образом.
После прибытия транспорт юго агрегата 2 к месту использования телескопической мачты она разворачивается в рабочее положение. Для этого стопор 24 выводится из гнезда, устройством разворота 23 корпус 1 устанавливается в необходимое положение (на какой-то угол или вертикально). Стопор 24 вводится в соответствующее гнездо (не показано). Далее фиксатор 26 выводится из своего отверстия, и ручкой 25 приводится во вращение механизм 22 управления, при этом ослабляется гибкая тяга 21. Пружинные приводы 5 и 6 энергией сжатия начинают распрямляться, увеличиваясь в длину выдвигая секции 3 и 4 от исходного размера L до L , при этом размеры 1 и 1| изменяются. По мере достижения необходимой длины выдвижения мачты фиксатор 26 вводится в ближайшее отверстие, и выдвижение секции мачты прекращается, так как гибкая тяга (например, трос), связанная с проущиной 20 через донышко 19, не дает перемещаться внутренней секции 4, а возможное перемещеQ ние промежуточной секции 3 осуществляется
осуществляется выдвижение в рабочее поло-
жение мачты.
Конструкция мачты телескопической обеспечивает расширение технических возможностей путем увеличения длины выдвижения при одновременном уменьщении мощности
привода, которая заключается в следующем:
обеспечивается выдвижение мачты на любую длину в пределах L до L j {макс,
исключается потребление энергии (элек- трической, пневматической, гидравлической и т. д.), что очень важно в полевых и экстремальных условиях;
обеспечивается простота конструкции и мягкость подвода последней секции к объекту.
3
J7
фиг. 2
к
ж.
75гб
I , /
Риг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопическая мачта с пакетным выдвижением секций с механизмом подъема на основе цепи | 2021 |
|
RU2760061C1 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА | 2000 |
|
RU2198131C2 |
| Подъемник | 1989 |
|
SU1744061A1 |
| ВЫДВИЖНОЕ УСТРОЙСТВО | 2001 |
|
RU2205770C2 |
| Грузоподъемный кран | 1980 |
|
SU931681A2 |
| Чемодан | 1990 |
|
SU1777794A1 |
| Телескопическая стойка | 1980 |
|
SU906931A1 |
| СВЕТОЗАЩИТНЫЕ ЖАЛЮЗИ | 1993 |
|
RU2054114C1 |
| Телескопическая мачта грузоподъемной установки | 1990 |
|
SU1678751A1 |
| Телескопическая мачта подъемника | 1987 |
|
SU1530556A1 |

L
п- . 1
3 72//
Фиг.
J
С)
19 20
-i.
±
Г- г
V7
фиг. 6
риг.7
| Патент США № 3359559, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
