Изобретение относится к радионавигации и может использоваться в радиогеодезических и радионавигационных системах.
Цель изобретения увеличение числа объектов, определяющих свое местоположение.
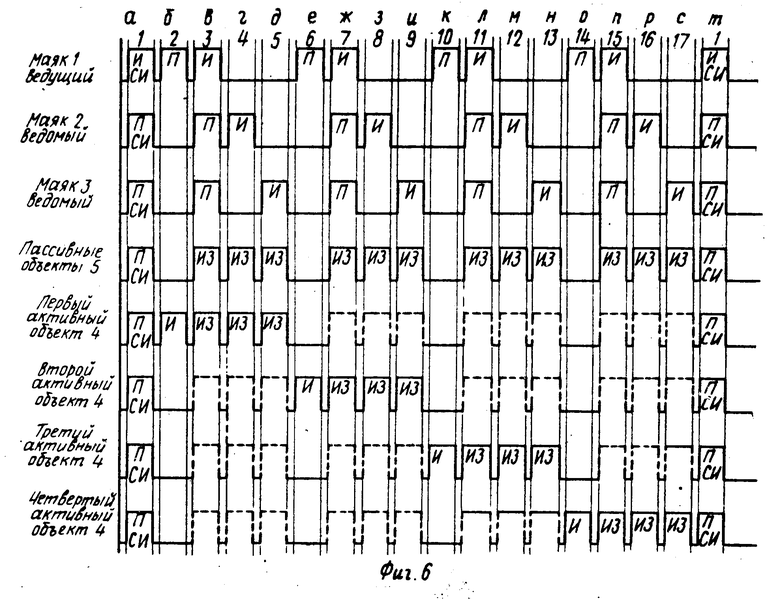
На фиг.1 схематически изображено взаимодействие ведущего и ведомых маяков, активных и пассивных объектов; на фиг.2 структурная схема ведущего маяка, вариант; на фиг.3 структурная схема ведомого маяка, вариант; на фиг.4 структурная схема активного объекта; на фиг.5 то же, пассивного объекта, на фиг.6 циклограмма работы системы, реализующей предложенный способ.
На фиг.1 изображены ведущий маяк 1, ведомые маяки 2 и 3, активный объект 4 и пассивные объекты 5 и 6.
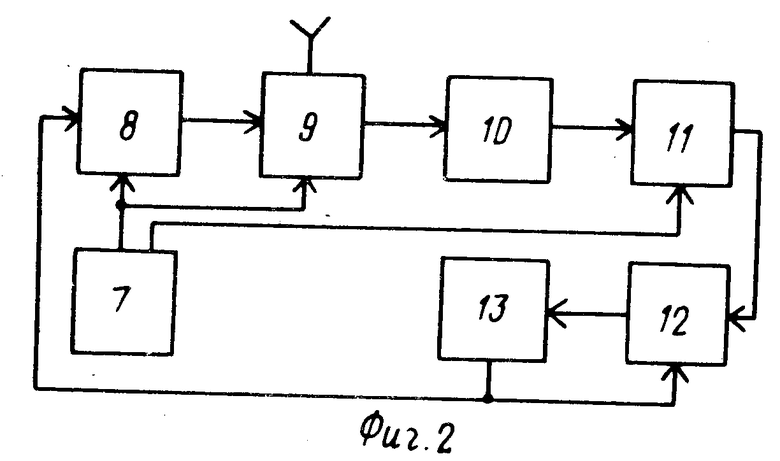
Ведущий маяк (фиг.2) содержит генератор 7 формата, передатчик 8, антенный переключатель 9, приемник 10, ключ 11, блок 21 автоподстройки фазы, опорный генератор 13.
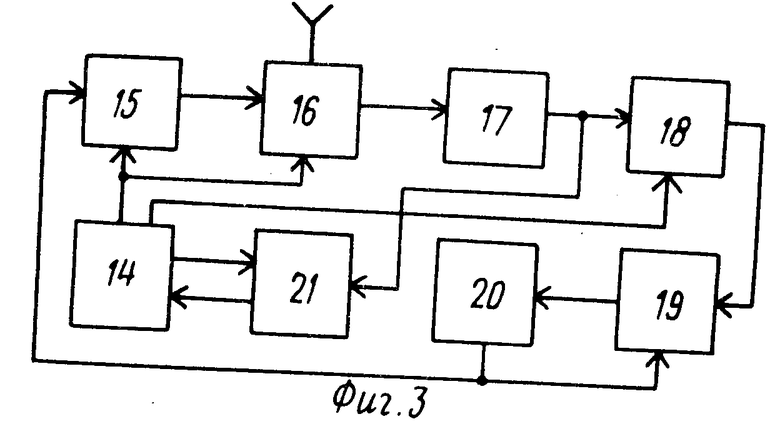
Ведомый маяк (фиг.3) содержит генератор 14 формата, передатчик 15, антенный переключатель 16, приемник 17, ключ 18, блок 19 автоподстройки фазы, опорный генератор 20, блок 21 синхронизации генератора формата.
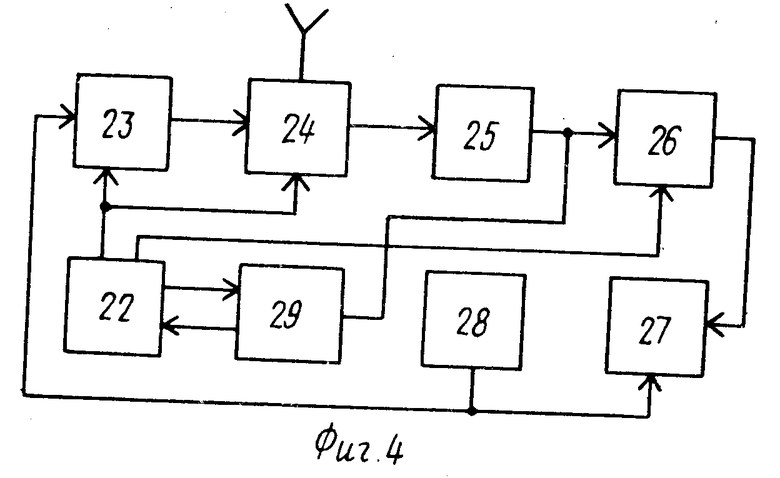
Активный объект (фиг. 4) содержит генератор 22 формата, передатчик 23, антенный переключатель 24, приемник 25, ключ 26, блок 27 измерения задержек, опорный генератор 28, блок 29 синхронизации генератора формата.
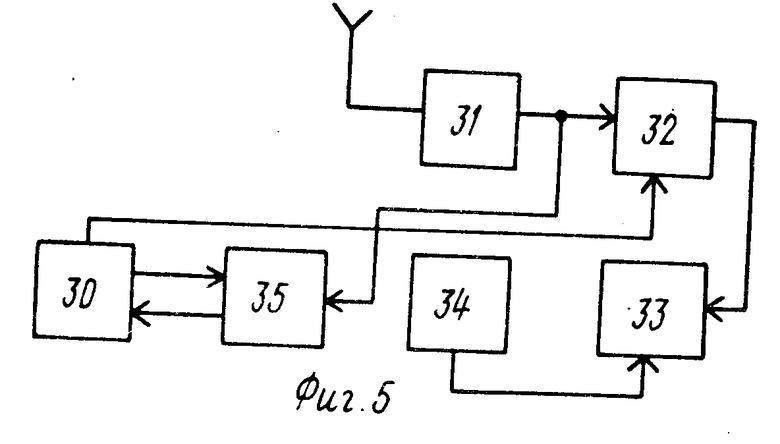
Пассивный объект (фиг.5) содержит генератор 30 формата приемник 31, ключ 32, блок 33 измерения задержек, опорный генератор 34, блок 35 синхронизации генератора формата.
Циклограмма работы устройства, реализующего предложенный способ, представлена на фиг.6, где И излучение, СИ синхроимпульс для временной подстройки форматов, П подстройка опорного генератора, ИЗ измерение задержек.
Работа системы осуществляется следующим образом.
Излучение сигналов на активных объектах 4 такты б, е, к, о на фиг.6, подстройка по этим сигналам опорного генератора 13 ведущего маяка 1 такты б, е, к, о на фиг.6.
Излучение сигнала ведущим маятником 1 такты в, ж, л, п на фиг.6, подстройка по сигналу ведущего маяка опорных генераторов 20 ведомых маяков 2 и 3 такты в, ж, л, п на фиг.6.
Излучение сигналов ведомых маяков 2 и 3 такты г, д, з, и, м, н, р, с на фиг. 6, измерение задержек сигналов всех маяков 1, 2 и 3 и вычисление местоположения активных 4 и пассивных 5 объектов такты в, г, д, ж, з, и, л, м, н, п, р, с на фиг.6.
Местоположения активных объектов вычисляют через расстояния до маяков, которые находят следующим образом:
где Rвщ расстояние до ведущего маяка,
C скорость распространения радиоволны,
τвщ задержка сигнала ведущего маяка,
где Rвм1 расстояние до первого ведомого маяка, задержка сигнала первого ведомого маяка,
задержка сигнала первого ведомого маяка,
Rвщ-вм1 расстояние между ведущим и первым ведомым маяками,
где Rвм2 расстояние до второго ведомого маяка, задержка сигнала второго ведомого маяка,
задержка сигнала второго ведомого маяка,
Rвщ-вм2 расстояние между ведущим и вторым ведомым маяками.
Местоположения пассивных объектов вычисляют через разности расстояний до маяков:
Фигурирующие в формулах расстояния между ведущим и ведомым маяками известны, поскольку известны координаты маяков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КАЖДОГО ИЗ M АКТИВНЫХ ОБЪЕКТОВ | 1986 |
|
SU1421101A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ПОДВИЖНОГО ОБЪЕКТА | 1994 |
|
RU2082096C1 |
| СПОСОБ РАДИОНАВИГАЦИИ И РЕГИОНАЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2164694C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ АКТИВНЫХ НЕОБСЛУЖИВАЕМЫХ СТАНЦИЙ | 1999 |
|
RU2172963C2 |
| СИСТЕМА ДИНАМИЧЕСКОГО ВЕДЕНИЯ И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ПРИМЕНЕНИЕМ ТРЕХМЕРНЫХ ВРЕМЯПРОЛЕТНЫХ КАМЕР | 2015 |
|
RU2699177C2 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197001C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 2017 |
|
RU2662642C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152052C1 |
Способ определения местоположения объектов, заключающийся в том, что последовательно во времени излучают сигналы всех активных объектов, на ведущем маяке принимают сигналы соответствующего активного объекта и производят подстройку по времени опорных сигналов, излучают сигналы ведущего маяка, на всех пассивных и соответствующем активном объектах принимают сигналы ведущего маяка и измеряют задержку принятого сигнала ведущего маяка относительно опорных сигналов соответствующих объектов, излучают сигналы первого ведомого маяка, на всех пассивных и соответствующем активном объектах принимают сигналы первого ведомого маяка и измеряют его задержку относительно опорных сигналов соответствующих объектов, излучают сигнал второго ведомого маяка, на всех пассивных и соответствующем активном объектах измеряют его задержку относительно опорных сигналов соответствующих объектов, на всех пассивных и активных объектах по известным координатам маяков и измеренным задержкам определяют местоположение всех объектов, о т л и ч а ю щ и й с я тем, что, с целью увеличения числа объектов, определяющих свое местоположение, опорные сигналы первого и второго ведомым маяков подстраивают по времени по принятым сигналам ведущего маяка, а сигналы каждого маяка принимают одновременно на всех пассивных объектах и соответстующем активном объекте.
Способ определения местоположения объектов, заключающийся в том, что последовательно во времени излучают сигналы всех активных объектов, на ведущем маяке принимают сигналы соответствующего активного объекта и производят подстройку по времени опорных сигналов, излучают сигналы ведущего маяка, на всех пассивных и соответствующем активном объектах принимают сигналы ведущего маяка и измеряют задержку принятого сигнала ведущего маяка относительно опорных сигналов соответствующих объектов, излучают сигналы первого ведомого маяка, на всех пассивных и соответствующем активном объектах принимают сигналы первого ведомого маяка и измеряют его задержку относительно опорных сигналов соответствующих объектов, излучают сигнал второго ведомого маяка, на всех пассивных и соответствующем активном объектах измеряют его задержку относительно опорных сигналов соответствующих объектов, на всех пассивных и активных объектах по известным координатам маяков и измеренным задержкам определяют местоположение всех объектов, отличающийся тем, что, с целью увеличения числа объектов, определяющих свое местоположение, опорные сигналы первого и второго ведомых маяков подстраивают по времени по принятым сигналам ведущего маяка, а сигналы каждого маяка принимают одновременно на всех пассивных объектах и соответствующем активном объекте.
| Агафонников А.М | |||
| Фазовые радиогеодезические системы для морских исследований | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Солесос | 1922 |
|
SU29A1 |
| Syledis, Technical manual, Juillet, 1976. | |||
