Сп
ел
00 00
ю
N5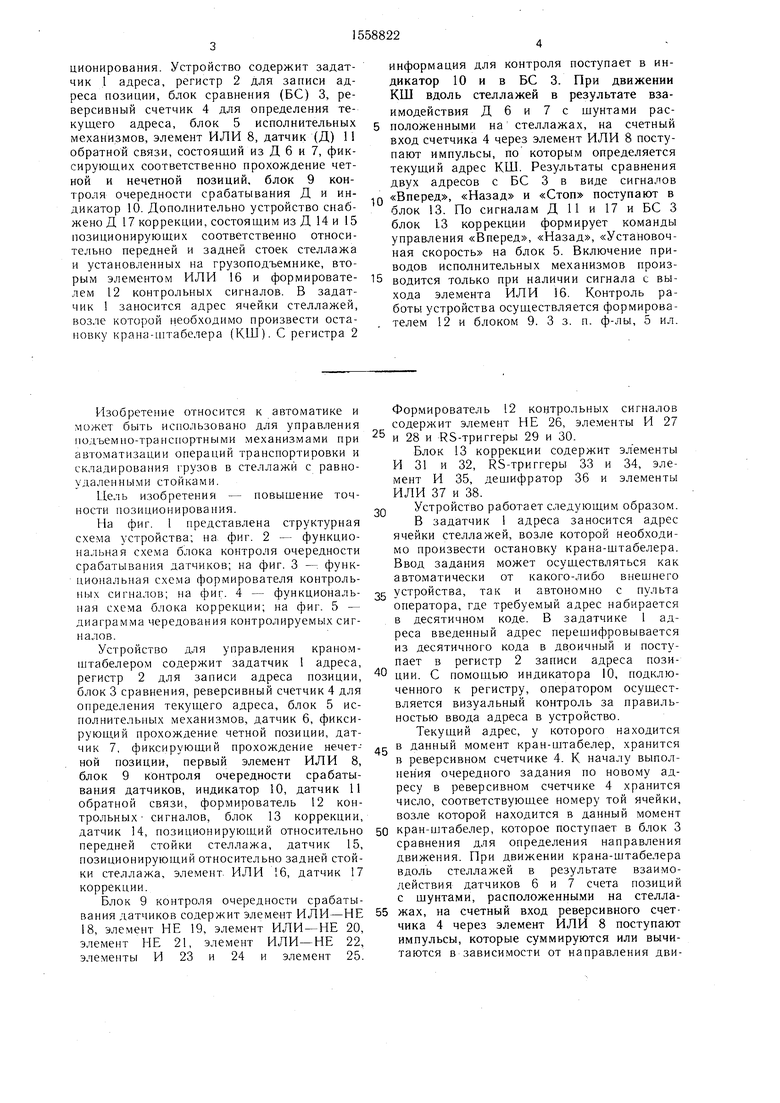
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство для управления автоматической транспортно-складской системой | 1988 |
|
SU1665338A1 |
| Информационное устройство для стеллажных складов | 1982 |
|
SU1123957A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для автоматического управления скоростью транспортного средства | 1985 |
|
SU1297012A1 |
| Многоканальное устройство для управления позиционированием | 1984 |
|
SU1242917A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
Изобретение относится к автоматике и может быть использовано для управления подъемно-транспортными механизмами при автоматизации операций транспортировки и складирования грузов в стеллажи с равноудаленными стойками. Цель изобретения - повышение точности позиционирования. Устройство содержит задатчик 1 адреса, регистр 2 для записи адреса позиции, блок сравнения /БС/ 3, реверсивный счетчик 4 для определения текущего адреса, блок 5 исполнительных механизмов, элемент ИЛИ 8, датчик /Д/ 11 обратной связи, состоящий из Д 6 и 7 фиксирующих соответственно прохождение четной и нечетной позиций, блок 9 контроля очередности срабатывания Д и индикатор 10. Дополнительно устройство снабжено Д 17 коррекции, состоящим из Д 14 и 15, позиционирующих соответственно относительно передней и задней стоек стеллажа и установленных на грузоподъемнике, вторым элементом ИЛИ 16 и формирователем 12 контрольных сигналов. В задатчик 1 заносится адрес ячейки стеллажей, возле которой необходимо произвести остановку крана-штабелера /КШ/. С регистра 2 информация для контроля поступает в индикатор 10 и в БС 3. При движении КШ вдоль стеллажей в результате взаимодействия Д 6 и 7 с шунтами, расположенными на стеллажах, на счетный вход счетчика 4 через элемент ИЛИ 8 поступают импульсы, по которым определяется текущий адрес КШ. Результаты сравнения двух адресов с БС 3 в виде сигналов "Вперед", "Назад" и "Стоп" поступают в блок 13. По сигналам Д 11 и 17 и БС 3 блок 13 коррекции формирует команды управления "Вперед", "Назад", "Установочная скорость" на блок 5. Включение приводов исполнительных механизмов производится только при наличии сигнала с выхода элемента ИЛИ 16. Контроль работы устройства осуществляется формирователем 12 и блоком 9. 3 з.п. ф-лы, 5 ил.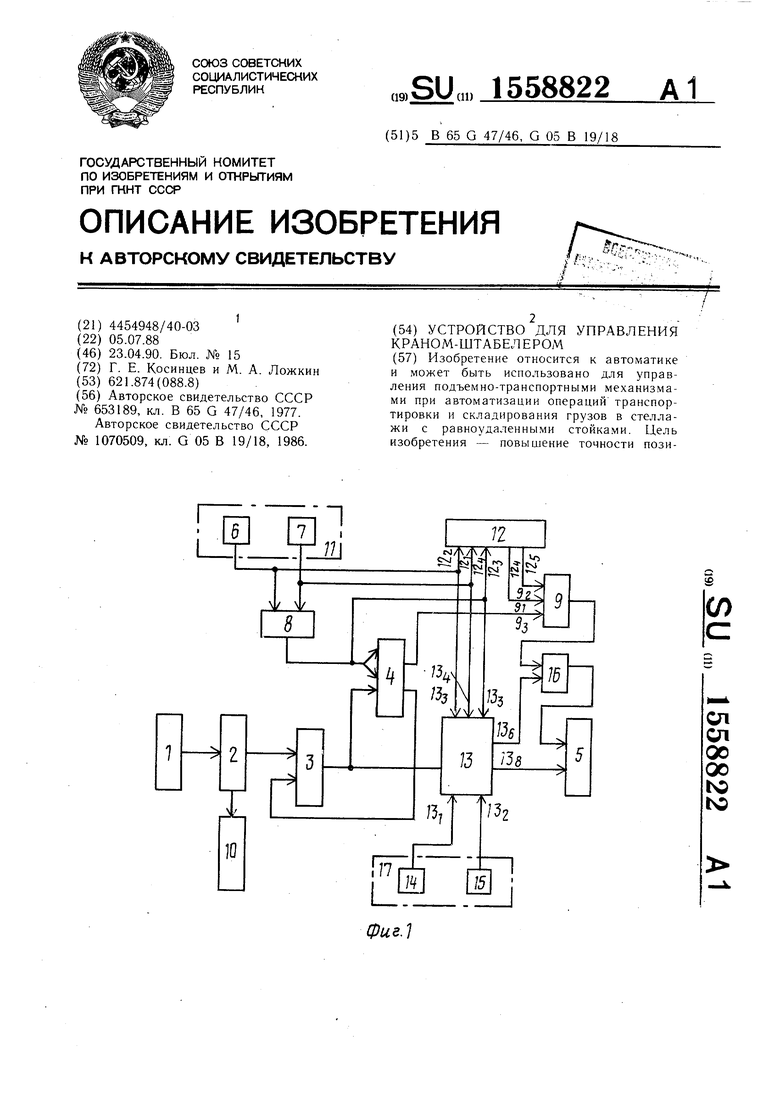
Фиг.1
ционирования. Устройство содержит задат- чик 1 адреса, регистр 2 для записи адреса позиции, блок сравнения (БС) 3, реверсивный счетчик 4 для определения текущего адреса, блок 5 исполнительных механизмов, элемент ИЛИ 8, датчик (Д) 11 обратной связи, состоящий из Д 6 и 7, фиксирующих соответственно прохождение четной и нечетной позиций, блок 9 контроля очередности срабатывания Д и индикатор 10. Дополнительно устройство снабжено Д 17 коррекции, состоящим из Д 14 и 15 позиционирующих соответственно относительно передней и задней стоек стеллажа и установленных на грузоподъемнике, вторым элементом ИЛИ 16 и формирователем 12 контрольных сигналов. В задат- чик 1 заносится адрес ячейки стеллажей, возле которой необходимо произвести остановку крана-штабелера (КШ). С регистра 2
Изобретение относится к автоматике и может быть использовано для управления подъемно-транспортными механизмами при автоматизации операций транспортировки и складирования грузов в стеллажи с равно- деленными стойками.
Цель изобретения - повышение точности позиционирования.
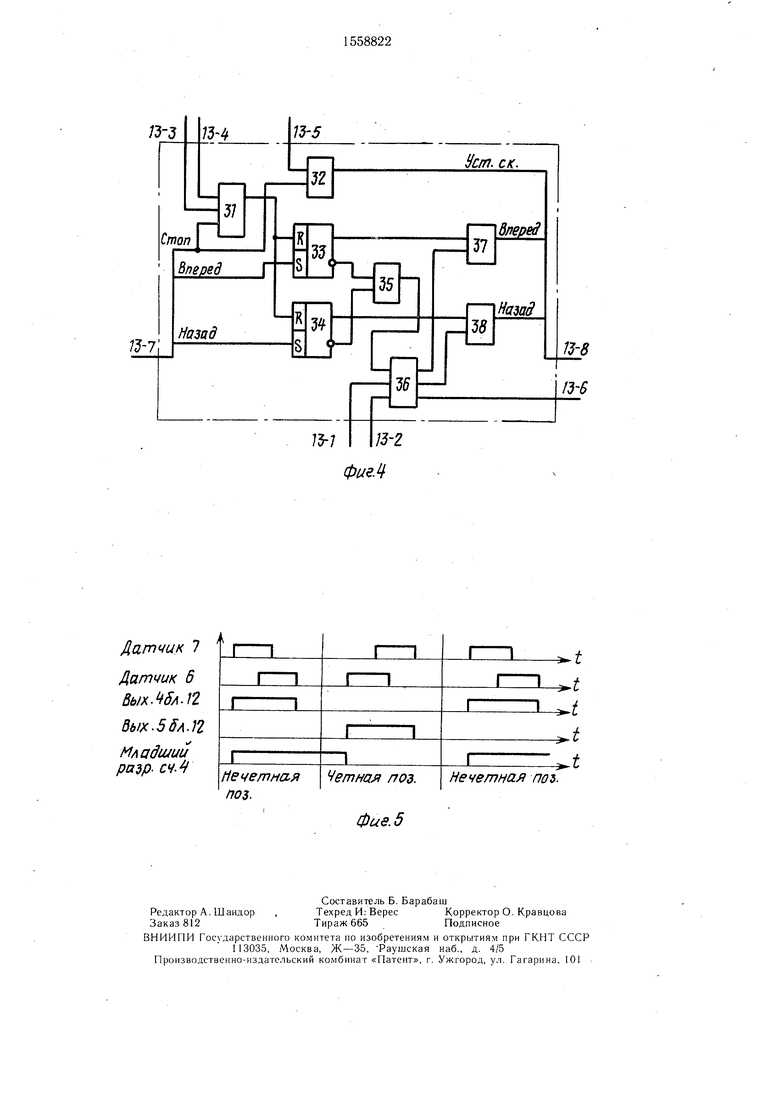
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - функциональная схема блока контроля очередности срабатывания датчиков; на фиг. 3 - функциональная схема формирователя контрольных сигналов; на фиг. 4 - функциональная схема блока коррекции; на фиг. 5 - диаграмма чередования контролируемых сигналов.
Устройство для управления краном- штабелером содержит задатчик 1 адреса, регистр 2 для записи адреса позиции, блок 3 сравнения, реверсивный счетчик 4 для определения текущего адреса, блок 5 исполнительных механизмов, датчик 6, фиксирующий прохождение четной позиции, датчик 7, фиксирующий прохождение нечет- ной позиции, первый элемент ИЛИ 8, блок 9 контроля очередности срабатывания датчиков, индикатор 10, датчик 11 обратной связи, формирователь 12 контрольных- сигналов, блок 13 коррекции, датчик 14, позиционирующий относительно передней стойки стеллажа, датчик 15, позиционирующий относительно задней стойки стеллажа, элемент ИЛИ 16, датчик 17 коррекции.
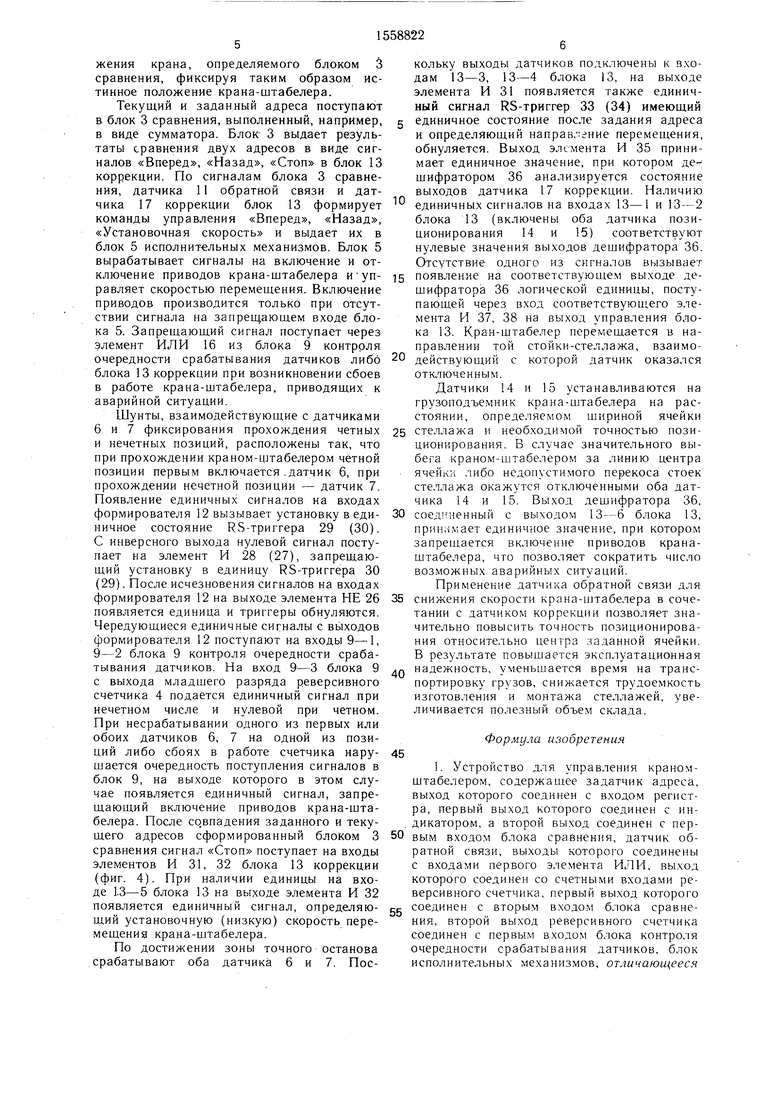
Блок 9 контроля очередности срабатывания датчиков содержит элемент ИЛИ-НЕ 18, элемент НЕ 19, элемент ИЛИ-НЕ 20, элемент НЕ 21, элемент ИЛИ-НЕ 22, элементы И 23 и 24 и элемент 25.
информация для контроля поступает в индикатор 10 и в БС 3. При движении КШ вдоль стеллажей в результате взаимодействия Д б и 7 с шунтами расположенными на стеллажах, на счетный вход счетчика 4 через элемент ИЛИ 8 поступают импульсы, по которым определяется текущий адрес КШ. Результаты сравнения двух адресов с БС 3 в виде сигналов
«Вперед, «Назад и «Стоп поступают в блок 13. По сигналам Д 11 и 17 и БС 3 блок 13 коррекции формирует команды управления «Вперед, «Назад, «Установочная скорость на блок 5. Включение приводов исполнительных механизмов производится только при наличии сигнала i выхода элемента ИЛИ 16. Контроль работы устройства осуществляется формирователем 12 и блоком 9. 3 з. п. ф-лы, 5 ил.
Формирователь 12 контрольных сигналов содержит элемент НЕ 26, элементы И 27
5 и 28 и RS-триггеры 29 и 30.
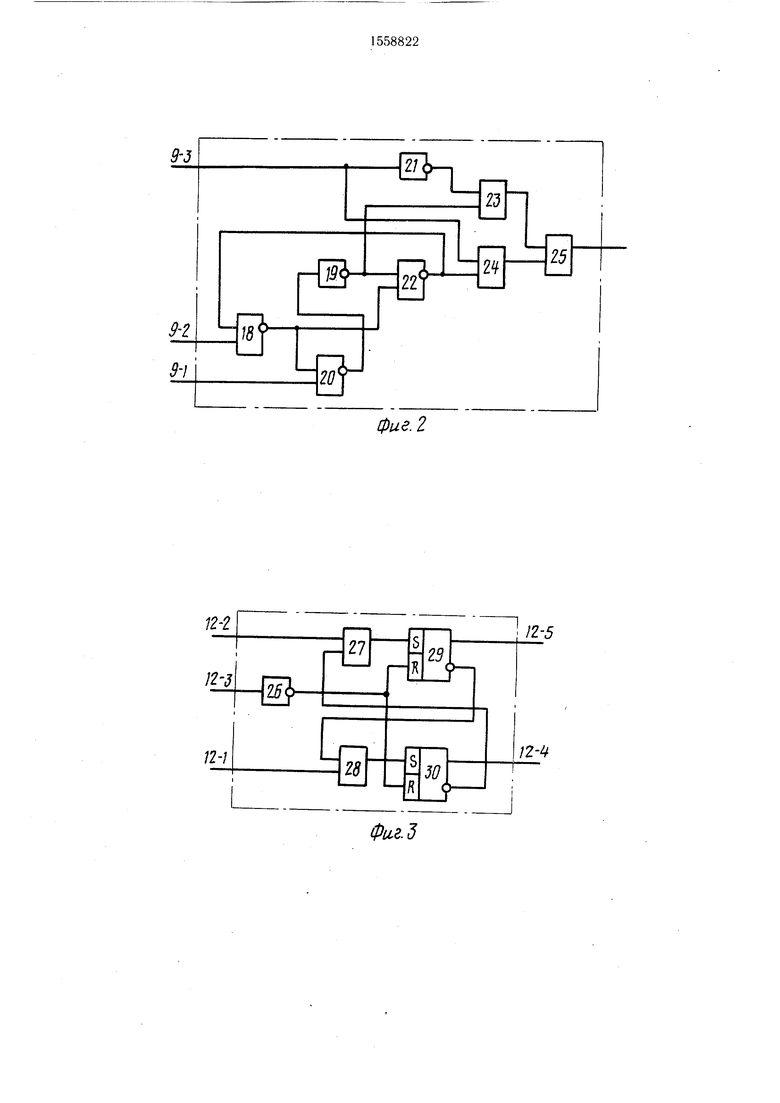
Блок 13 коррекции содержит элементы И 31 и 32, RS-триггеры 33 и 34, элемент И 35, дешифратор 36 и элементы ИЛИ 37 и 38.
Q Устройство работает следующим образом. В задатчик адреса заносится адрес ячейки стеллажей, возле которой необходимо произвести остановку крана-штабелера. Ввод задания может осуществляться как автоматически от какого-либо внешнего
5 устройства, так и автономно с пульта оператора, где требуемый адрес набирается в десятичном коде. В задатчике 1 адреса введенный адрес перешифровывается из десятичного кода в двоичный и поступает в регистр 2 записи адреса пози0 ции. С помощью индикатора 10, подключенного к регистру, оператором осуществляется визуальный контроль за правильностью ввода адреса в устройство.
Текущий адрес, у которого находится
5 в данный момент кран-штабелер, хранится в реверсивном счетчике 4. К началу выполнения очередного задания по новому адресу в реверсивном счетчике 4 хранится число, соответствующее номеру той ячейки, возле которой находится в данный момент
0 кран-штабелер, которое поступает в блок 3 сравнения для определения направления движения. При движении крана-штабелера вдоль стеллажей в результате взаимодействия датчиков 6 и 7 счета позиций с шунтами, расположенными на стелла5 жах, на счетный вход реверсивного счетчика 4 через элемент ИЛИ 8 поступают импульсы, которые суммируются или вычитаются в зависимости от направления движения крана, определяемого блоком 3 сравнения, фиксируя таким образом истинное положение крана-штабелера.
Текущий и заданный адреса поступают в блок 3 сравнения, выполненный, например, § в виде сумматора. Блок 3 выдает результаты сравнения двух адресов в виде сигналов «Вперед, «Назад, «Стоп в блок 13 коррекции. По сигналам блока 3 сравнения, датчика 11 обратной связи и датчика 17 коррекции блок 13 формирует команды управления «Вперед, «Назад, «Установочная скорость и выдает их в блок 5 исполнительных механизмов. Блок 5 вырабатывает сигналы на включение и отключение приводов крана-штабелера и уп- 15 равляет скоростью перемещения. Включение приводов производится только при отсутствии сигнала на запрещающем входе блока 5. Запрещающий сигнал поступает через элемент ИЛИ 16 из блока 9 контроля очередности срабатывания датчиков либо 20 блока 13 коррекции при возникновении сбоев в работе крана-штабелера, приводящих к аварийной ситуации.
Шунты, взаимодействующие с датчиками
кольку выходы датчиков подключены к входам 13-3, 13-4 блока 13, на выходе элемента И 31 появляется также единичный сигнал RS-триггер 33 (34) имеющий единичное состояние после задания адреса и определяющий направление перемещения, обнуляется. Выход элемента И 35 принимает единичное значение, при котором дешифратором 36 анализируется состояние выходов датчика 17 коррекции. Наличию единичных сигналов на входах 13-I и 13-2 блока 13 (включены оба датчика позиционирования 14 и 15) соответствуют нулевые значения выходов дешифратора 36. Отсутствие одного из сигналов вызывает появление на соответствующем выходе дешифратора 36 логической единицы, поступающей через вход соответствующего элемента И 37, 38 на выход управления блока 13. Кран-штабелер перемещается в направлении той стойки-стеллажа, взаимодействующий с которой датчик оказался отключенным.
Датчики 14 и 15 устанавливаются на грузоподъемник крана-штабелера на расстоянии, определяемом шириной ячейки
6 и 7 фиксирования прохождения четных 25 стеллажа и необходимой точностью позии нечетных позиции, расположены так, что при прохождении краном-штабелером четной позиции первым включается .датчик 6, при прохождении нечетной позиции - датчик 7. Появление единичных сигналов на входах формирователя 12 вызывает установку в еди- 30 ничное состояние RS-триггера 29 (30). С инверсного выхода нулевой сигнал поступает на элемент И 28 (27), запрещающий установку в единицу RS-триггера 30 (29). После исчезновения сигналов на входах
ционкрования. В случае значительного выбега краном-штабелером за линию центра ячейки либо недопустимого перекоса стоек стеллажа окажутся отключенными оба датчика 14 и 15. Выход дешифратора 36, соединенный с выходом 13-6 блока 13, принимает единичное значение, при котором запрещается включение приводов крана- штабелера, что позволяет сократить число возможных аварийных ситуаций.
Применение датчика обратной связи для
формирователя 12 на выходе элемента НЕ 26 35снижения скорости крана-штабелера в сочепоявляется единица и триггеры обнуляются.тании с датчиком коррекции позволяет знаЧередующиеся единичные сигналы с выходовчительно повысить точность позиционироваформирователя 12 поступают на входы 9-1,ния относительно центра заданной ячейки.
9-2 блока 9 контроля очередности сраба-В результате повышается эксплуатационная
40
тывания датчиков. На вход 9-3 блока 9 с выхода младшего разряда реверсивного счетчика 4 подается единичный сигнал при нечетном числе и нулевой при четном. При несрабатывании одного из первых или обоих датчиков 6, 7 на одной из позиций либо сбоях в работе счетчика нару- 45 шается очередность поступления сигналов в блок 9, на выходе которого в этом случае появляется единичный сигнал, запрещающий включение приводов крана-штабелера. После совпадения заданного и текунадежность, уменьшается время на транспортировку грузов, снижается трудоемкость изготовления и монтажа стеллажей, увеличивается полезный объем склада.
Формула изобретения
По достижении зоны точного останова срабатывают оба датчика 6 и 7. Пос55
ратной связи, выходы которого соединены с входами первого элемента ИЛИ, выход которого соединен со счетными входами реверсивного счетчика, первый выход которого соединен с вторым входом блока сравнения, второй выход реверсивного счетчика соединен с первым входом блока контроля очередности срабатывания датчиков, блок исполнительных механизмов, отличающееся
кольку выходы датчиков подключены к входам 13-3, 13-4 блока 13, на выходе элемента И 31 появляется также единичный сигнал RS-триггер 33 (34) имеющий единичное состояние после задания адреса и определяющий направление перемещения, обнуляется. Выход элемента И 35 принимает единичное значение, при котором дешифратором 36 анализируется состояние выходов датчика 17 коррекции. Наличию единичных сигналов на входах 13-I и 13-2 блока 13 (включены оба датчика позиционирования 14 и 15) соответствуют нулевые значения выходов дешифратора 36. Отсутствие одного из сигналов вызывает появление на соответствующем выходе дешифратора 36 логической единицы, поступающей через вход соответствующего элемента И 37, 38 на выход управления блока 13. Кран-штабелер перемещается в направлении той стойки-стеллажа, взаимодействующий с которой датчик оказался отключенным.
Датчики 14 и 15 устанавливаются на грузоподъемник крана-штабелера на расстоянии, определяемом шириной ячейки
стеллажа и необходимой точностью позиционкрования. В случае значительного выбега краном-штабелером за линию центра ячейки либо недопустимого перекоса стоек стеллажа окажутся отключенными оба датчика 14 и 15. Выход дешифратора 36, соединенный с выходом 13-6 блока 13, принимает единичное значение, при котором запрещается включение приводов крана- штабелера, что позволяет сократить число возможных аварийных ситуаций.
Применение датчика обратной связи для
снижения скорости крана-штабелера в соченадежность, уменьшается время на транспортировку грузов, снижается трудоемкость изготовления и монтажа стеллажей, увеличивается полезный объем склада.
Формула изобретения
Вым входом блока сравнения, датчик об-
ратной связи, выходы которого соединены с входами первого элемента ИЛИ, выход которого соединен со счетными входами реверсивного счетчика, первый выход которого соединен с вторым входом блока сравнения, второй выход реверсивного счетчика соединен с первым входом блока контроля очередности срабатывания датчиков, блок исполнительных механизмов, отличающееся
тем, что, с целью повышения точности позиционирования, в устройство введены формирователь контрольных сигналов, второй элемент ИЛИ, блок коррекции и датчик коррекции, выходы которого соединены с первым и вторым входами блока коррекции, первый выход которого соединен с первым входом второго элемента ИЛИ, выход которого соединен с входом блока исполнительных механизмов, выходная шина блока сравнения подключена к управляющей шине реверсивного счетчика и входной шине блока коррекции, выходная шина которого соединена с входной шиной блока исполнительных механизмов, выходы датчика обратной связи соединены с третьим и четвертым входами блока коррекции и первым и вторым входами формирователя контрольных сигналов, первый и второй выходы которого соединены с вторым и третьим входами блока контроля очередности срабатывания датчиков, выход блока иости срабатывания датчиков, выход которого соединен с вторым входом второго элемента ИЛИ, выход первого элемента ИЛИ соединен с третьим входом формирователя контрольных сигналов и пятым входом блока коррекции.
элемента ИЛИ, вторые выходы первого и второго триггеров соединены с вторыми входами первого и второго элементов ИЛИ. 3. Устройство по п. 1, отличающееся
тем, что формирователь контрольных сигналов содержит два триггера, два элемента И и элемент НЕ, вход которого является третьим входом формирователя контрольных сигналов, выход элемента НЕ соединен с первыми входами первого и второго триггеров, первые выходы которых являются первым и вторым выходами формирователя контрольных сигналов, второй выход первого триггера соединен с первым входом первого элемента И, выход которого
соединен с вторым входом второго тригге ра, второй выход которого соединен с первым входом второго элемента И, выход которого соединен с вторым входом первого триггера, вторые входы первого и второго элементов И являются первым и вторым входами формирователя контрольных сигналов.
0
5 первым входом второго элемента И и первым входом третьего элемента ИЛИ-НЕ, второй вход которого является вторым входом блока контроля очередности срабатывания датчиков, выход третьего элемента ИЛИ-НЕ соединен с вторыми входами первого и второго элементов ИЛИ-НЕ. вход второго элемента НЕ является третьим входом блока контроля очередности срабатывания датчиков и соединен с вторым входом второго элемента И и через второй
5 элемент НЕ с вторым входом первого элемента И, выходы первого и второго элементов И соединены с входами элемента ИЛИ.
п-г
12-3
Ijb12-1
с
фие.2
27
29
/2-5
Я
фи&3
30
12-Ц
фиеЛ
Датчик 7
Датчик 6 вых.Ч 5л-П
дых.56л.П
Младший раэр- сч.Ц
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
