ЛУИВ 5 через муфту 27 и передаточ- нчпо ось соединен с центром угломест- ной части антенны. Во время поворота антенны по углу места ролик 23 отслеживает компенсирующий профиль
Изобретение относится к конструкции антенн, вращаемых по углу мест в частности к устройствам для измерения угла места радиооси антенны.
Целью изобретения является повьш ние точности компенсации гравитационных отклонений радиооси антенны при угломестном повороте.
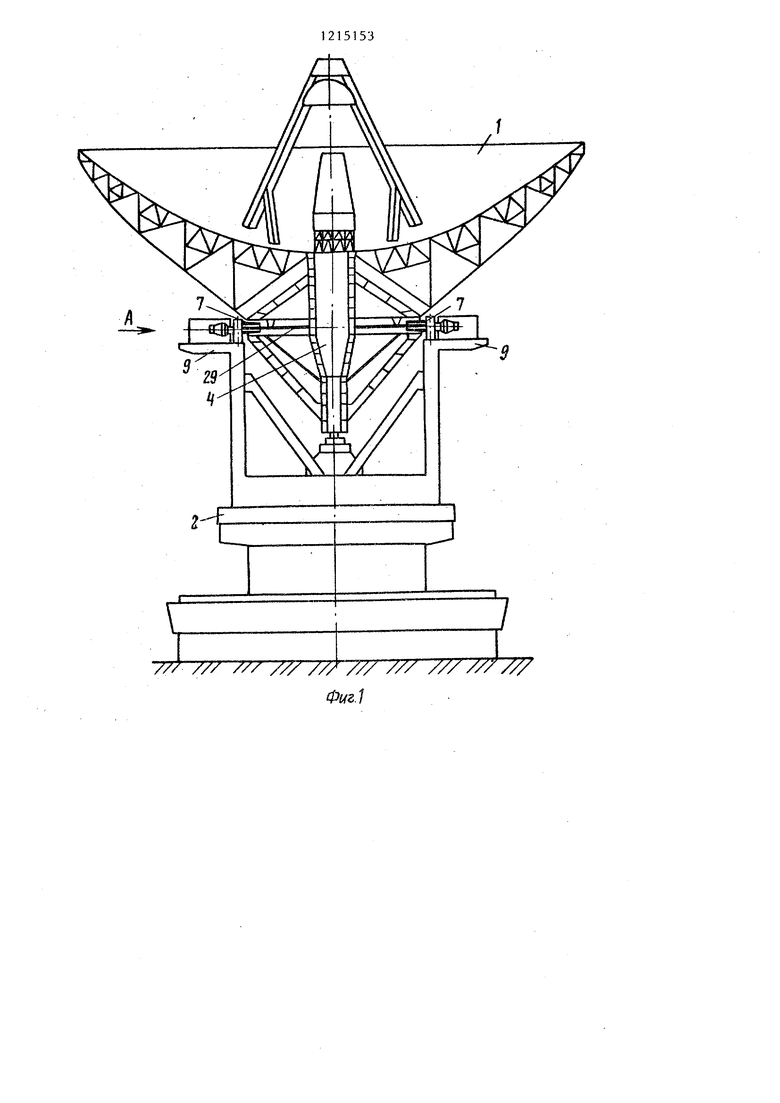
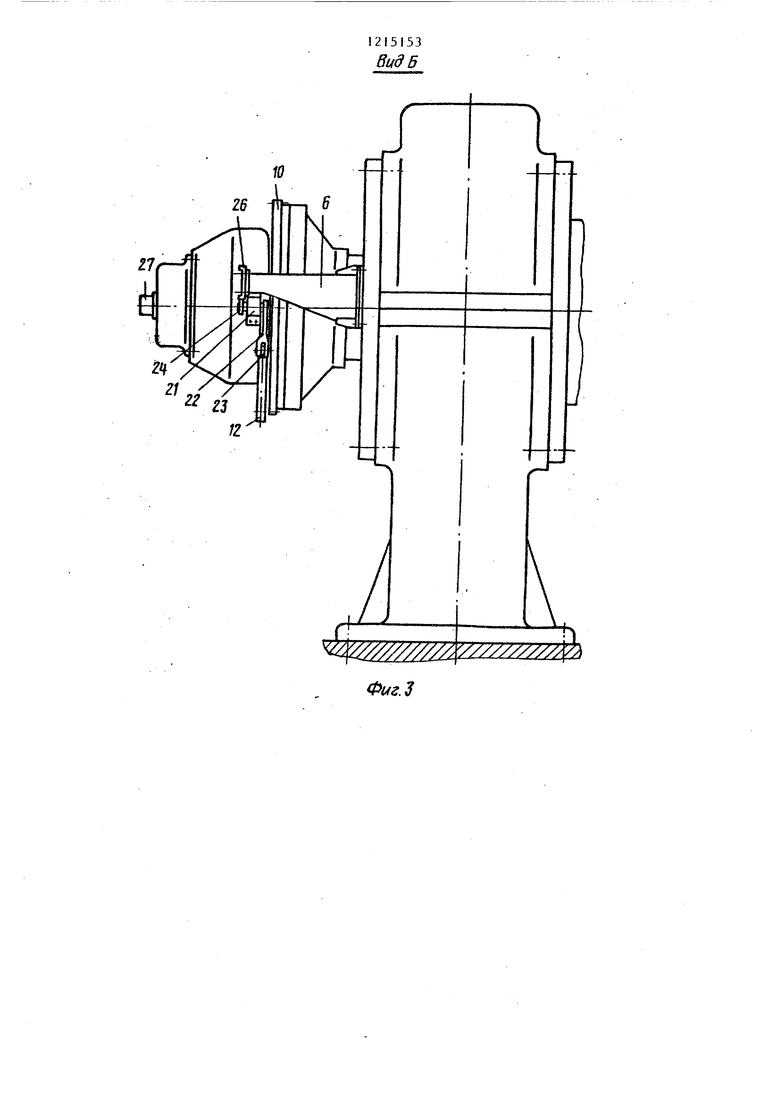
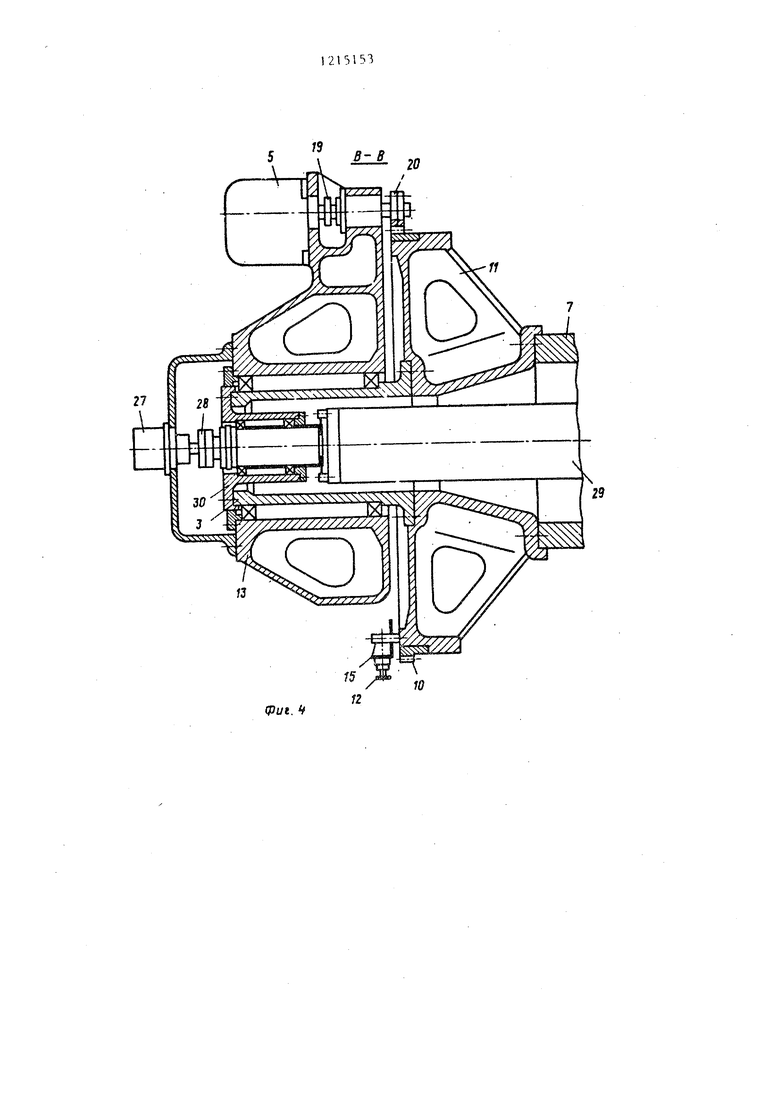
На фиг. 1 представлена антенна, общий вид; на фиг. 2 - вид А на фиг. 1 (устройство для компенсации гравитационных отклонений радиооси антенны ; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - разрез Д-Д на фиг. 2; на фиг. 7 - разрез Е-Е на фиг. 6; на фиг. 8 - вид Ж на фиг.2
Устройство для компенсации гравитационных отклонений радиооси антенны I, установленной на опорно-поворотном устройстве 2, содержит вал 3, жестко закрепленный на угломестной части 4 антенны 1 и расположенный вдоль угломестной оси вращения, датчик 5 угла поворота вала 3, связанный с неподвижным основанием 6. Угломестная ось определяется двумя цапфами 7, каждая из которых через подшипник 8 оперта на азимутальную часть 9 опорно-поворотного устройства 2. Внешний торец цапфы 7 .снабжен зубчатым ободом 10, установленным на корпусе 11. На валу 3 жестко закреплен кулачок 12 и установлена с возможностью поворота платформа 13
Кулачок 12 выполнен с компенсирующим профилем, которьй определен из условия компенсации гравитационного отклонения радиооси антенны 1, Кулачок 12 может быть выполнен в виде упругой ленты 14, установленной с помощью кронштейна 15 и радиальных рет улируемых .по дли1215153
кулачка 12, происходит поворот дву- , гшечего рычага и соответствующий поворот платформы 13. В 15езуьтате этого в показания ДУПБ 5 вносится поправка. 3 з,п.ф-лы, 8 ил.
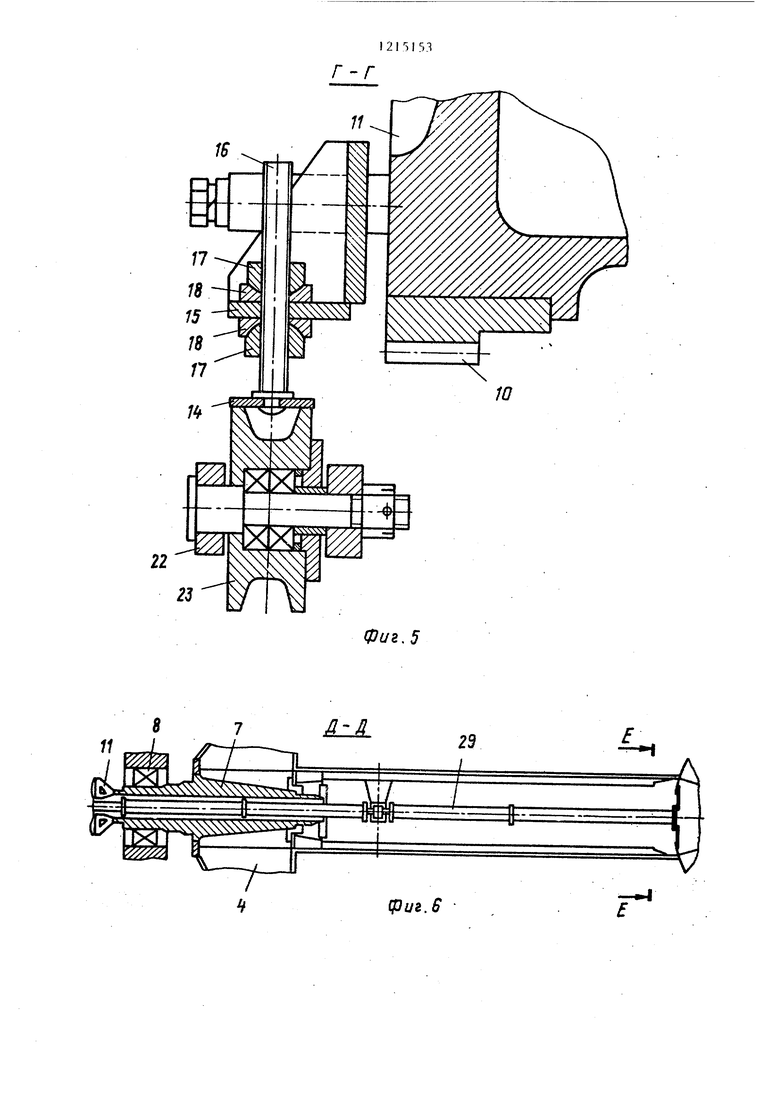
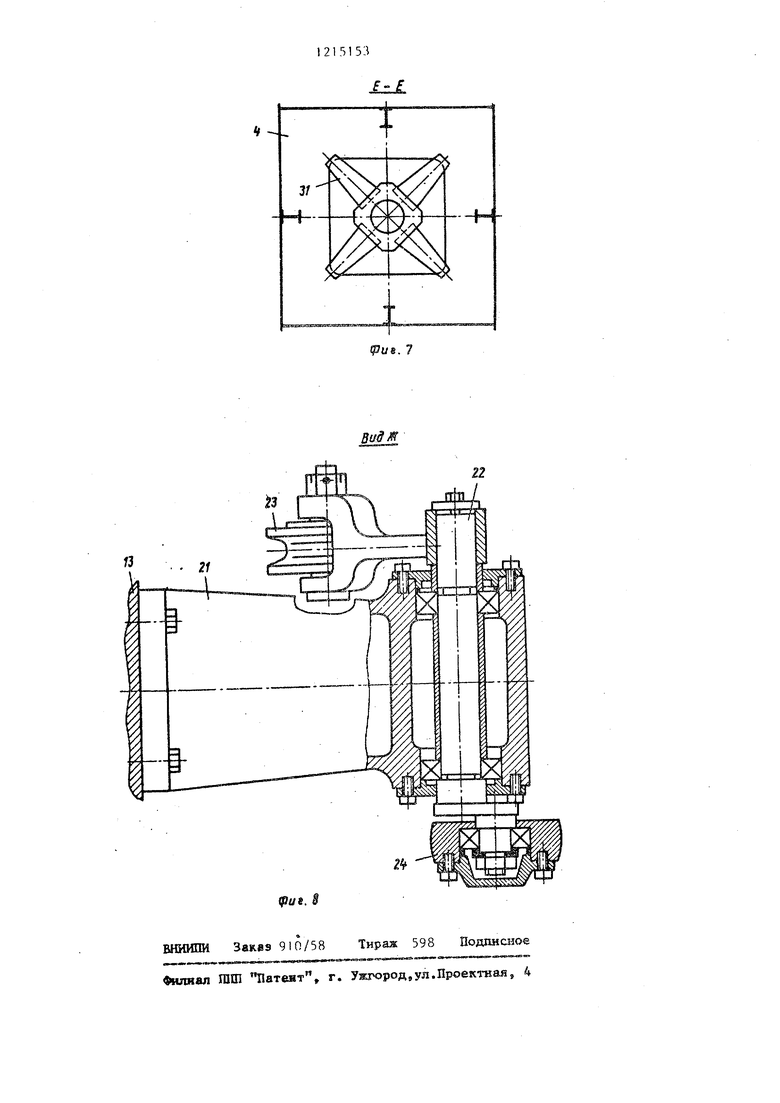
не опор, закрепленных, на кронщтеине, например резьбовых щпилек 16. Для фиксации положения щпилек 16 в радиальном направлении предусмотре ны элементы фиксации в виде сферических гаек 17. При этом сферичес- щайбы 18 на шпильках 16 установлены с радиальным зазором, что обеспечивает их самоустановку относительно кронштейна 15. На платформе 13 установлен датчик 5 угла поворота вала 3. Датчик 5 кинематически соединен с зубчатым ободом 10 с помощью муфты 19 и разрезной шестерни 20. На кронштейне 21 платформы 13 шарнирно закреплен двуплечий рычаг 22, снабженный на концах роликами 23 и 24. Датчик 5 . с грузом расположен в наклонной
осевой плоскости 25, что создает неуравновешенность платформы 13 относительно вала 3. Неуравновешенность платформы 13 обеспечивает поджатие ролика 23 большего плеча рычага 22 к кулачку 12 и ролика 24 меньшего плеча к упору 26, жестко закрепленному на основании 6. Соотношение длин плеч, рычага 22, угол разворота плеч рьтчага и точка крепления рычага определяются в каждом случае с учетом величины необходимого компенсационного поворота платформы 13. Возможно расположение датчика 5 угла поворота вала 3
на торце платформы 13. Датчик 3
через муфту 27 и передаточную ось 28 соединен с центром угломестной части 4 антенны I. Конец оси 28 установлен во втулке 29, закрепленной
на валу 3. Втулка 29 образует с
осью 28 вращательную кинематическую пару. Другой конец оси 28 с помощью пластин 30 закреплен на центре угло- . местной части 4 антенны. Передаточная ось 28 снабжена допо.пнительной
опорой 31 и расположена соосно с угломестной осью вращения. При этом исключаются погрешности в кинематической паре зубчатый обод - разрезная шестерня.
На фиг. 1 представлена возможная схема использования двух датчиков угла поворота вала, размещенных по одному у двух цапф 7. Результаты измерений в этом случае усредняются
Устройство для компенсации гравитационных отклонений радиооси антенны работает следующим образом.
Предварительно, в процессе юстировки антенны 1, выставляют профиль кулачка 12 по кривой линии, обеспечивающей учет величины реальных отклонений радиооси по углу места. Во время поворота антенны 1 по углу места ролик 23 отслеживает компенсирую- щий профиль кулачка 12. На участках с изменением кривизны профиля кулачка 12 происходит поворот двуплечего рычага 22 и соответствующий дово- рот платформы 13. В результате этого в показания датчика 5 вносится поправка, равная по величине и противоположная по знаку отклонению радиооси антенны, обусловленному гра- .витационной деформацией антенны.
Формула изобретения
1. Устройство Для компенсации гравитационных отклонений радиооси антенны при угломестном повороте,
содержащее вал, соединенный с угло- местной частью антенны и расположенный вдоль угломестной оси, и кинематически связанный с основанием устройства датчик угла поворота вала, отличающееся тем что, с целью повыщения точности компенсации, на валу неподвижно закреплен кулачок и установлена с возможностью поворота платформа, на которой установлен датчик угла поворота вала и двуплечий рычаг, одно плечо которого поджато к кулачку, а другое - к основанию устройства.
2.Устройство по П.1, отличающееся тем, что кулачок выполнен в виде упругой ленты, закрепленной с помощью радиальных и . регулируемых по длине опор, напри- мер резьбовых шпилек с элементами фиксации.
3.Устройство по П.1, о т л и- чающееся тем, что платформа вьтолнена неуравновешенной относи тельно оси вала для поджатия плеч рычага к кулачку и к основанию устройства.
4.Устройство по П.1, о т л и- чающееся тем, что.датчик угла поворота вала размещен на торце платформы и кинематически связан с угломестной частью антенны посредством муфты и передаточной оси, размещенной внутри вала.
/// /// /// /7/ /// /////////
Фиг.
10
26
2.7.
24
21
22
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированное опорно-поворотное устройство | 2023 |
|
RU2814798C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2002 |
|
RU2202016C1 |
| Загрузочное устройство | 1990 |
|
SU1745507A1 |
| Рефлектор радиотелескопа | 1982 |
|
SU1058016A1 |
| Устройство отсчета углового положения радиооси полноповоротного радиотелескопа | 1988 |
|
SU1601518A1 |
| Загрузочное устройство | 1987 |
|
SU1423345A1 |
| Кромкогибочная установка | 1990 |
|
SU1784339A1 |
| Рентгеновская камера для съемки крупнозернистых материалов | 1986 |
|
SU1402872A2 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
Изобретение обеспечивает повьшгение точности компенсации гравитационных отклонений радиооси антенны при угломестном повороте. Антенна установлена на опорно-поворотном устройстве. На угломестной части антенны жестко закреплен вал. Вал расположен вдоль угломестной оси вращения. На валу жестко закреплен кулачок 12 и установлена с возможностью поворота платформа I3. Кулачок 12 выполнен с компенсирующим профилем, который определен из условия компенсации гравитационного отклонения радиооси антенны, например, в виде упругой ленты, установленной с помощью .кронштейна 15 в опорах. На платформе 13 установлен датчик угла поворота вала (ДУПВ) 5. На кронштейне 21 платформы 13 закреплен двуплечий рычаг с роликами 23 и 24 на концах. ДУПВ 5 с грузом расположен в наклонной осевой плоскости 25, что создает неуравновешенность платформы 13 относительно вала. S с/) W V У/////////// У У //////уГ// ///7/
Фиг.З
Y//7777777
Фиг. tf
В- В
20
W
Г -Г
16
22
фиг. 5
й-Л
25
ЗР
фиг.6
ipus. 7
13
21
22
(put. В
ЫМИПИ Зак.вэ 910/58 Тираж 598 Подписное
ш mimimi чв iH «iii ijiin- «nHriniiни mnojuiniinMi lanfitrf -iHii-ii-Biiw-rr-rn-iii-гтшт -и rr n гт i in nirnr- тгт-ггттгп-тгФилиал ШШ Патент, г. Ужгород,ул.Проекэ-вая, 4
