(54) ШАГОВЫЙ КОНВЕЙЕР-НАКОПИТЕЛЬ
1
Изобретение относится к станкостроению и может найти применение в транспортных устройствах автоматических линий для механической обработки.
Известен шаговый конвейер-накопитель , осуществляющий постоянное заполнение свободных позиций направлякхцих гребенок деталями с предыдущих позиций, перемещаемых неуравновешенными рычагами в виде фигурных планок, взаимодействующими с равномерно расположенными на тяге толкателями 13.
Наиболее близким т.ехническим решением к предлагаемому является шаговый конвейер-накопитель, содержащий направляющие гребенки, неподвижный корпус i на котором шарнирно закреплены неуравновешенные опорные рамки, установленную с возможностью возвратно-поступательного движения штангу с толкателями для взаимодействия с опорными рамками {,2, .
Недостатком указанных конвейеров явяляется то, что деталь, лежащая на позиции гребенок, упирается в .поднятые радиусные затьллки фигурных планок соседней справа опорной рамки если (она нагружена деталью). При
съеме детали с этой опорной рамки она должна повернуться против часовой стрелки в силу своей неуравновешенности , преодолевая трение детали,
5 упирающейся в ргщиусные затылки ее фигурных планок. В процессе работы конвейера на радиусных затылках фигурных планок образуются углубления вследствие износа от воздействия
10 на них деталей. Эти углубления препятствуют повороту опорных рамок. Появляются отказы в работе конвейера из-за затирания опорных рамок транспортируемыми детсшями, т. е. снижается надежность работы конвейера.
Целью изобретения является повышение надежности работы конвейера.
Указанная цель достигается в том, что направляющие гребенки установлены
20 с возможностью возвратно-поступательного движения посредстве кинематической связи их со штангой. Кинематическая связь направляющих гребенок со штангой выполнена в виде шарнирно
25 закрепленного на неподвижной опоре трехплечего рычага, одно плечо которого шарнирно связано с гребенкс1ми, а штанга снабжена кулачком для взаимодействия с двумя другими плечами
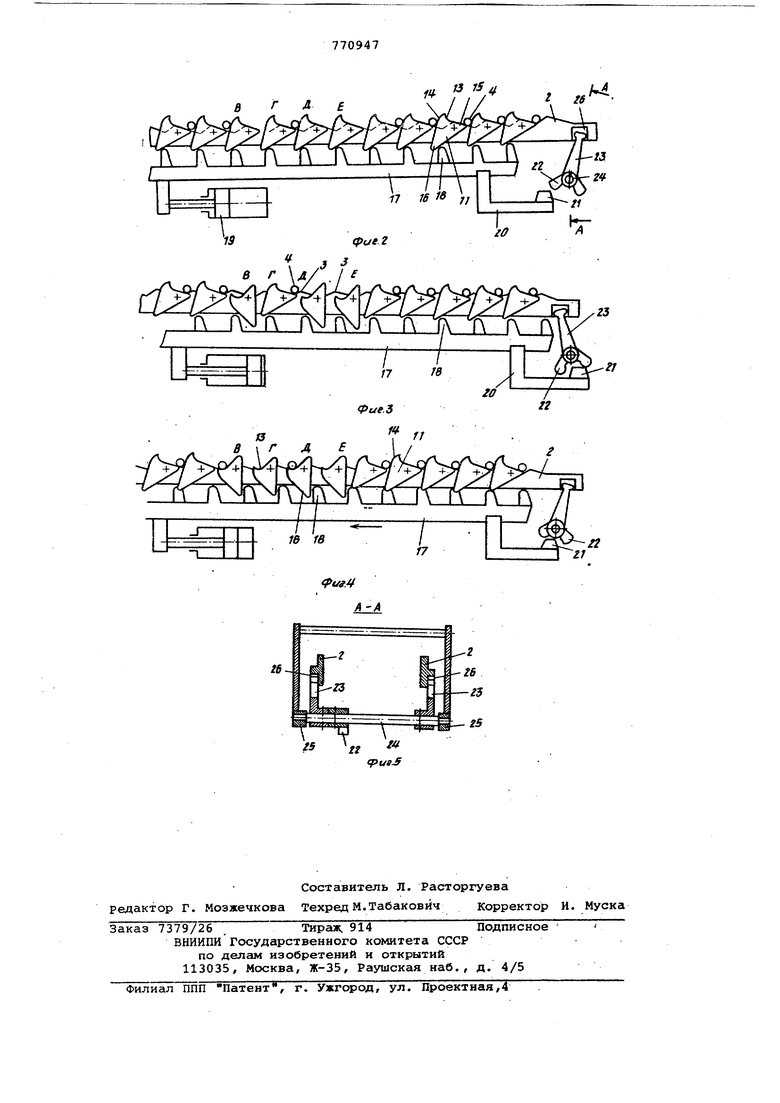
30 рычага. На фиг. 1 изображен конвейер, поперечь ый разрез; на. фиг. 2 - папожение опорных рамок и направляющих гребенок рабочего участка транспорте ра в конце хода штанги влево; на фиг. 3 - то же в конце хода штанги вправо; на фиг. 4 - то же в начале взаимодействия толкателей штанги с опорными рамками; на фиг. 5 - разрез А-А на фиг. 2. На роликах 1(фиг. 1)установлены направляющие гребенки 2, имеющие выступы 3(фиг. 3),образующие позиции ДЛЯ транспортируемых деталей 4 , кото рые располагаются перпендикулярно к направлению транспортирования Ролики 1 установлены на осях, закрепленных на утолщениях 5 боковых стено б, а планки 7 прижимают гребенки 2 к этим роликам. Расположение роликов и планок определяется конструктивно в зависимости от длины конвейера. На основании 8 установлены стойки 9, поддерживающие неподвижный корпус 10 несущий неуравновешенные опорные рамки , выполняющие роль транспорти рующе-отсекающих элементов, каждая из которых состоит из двух фигурных планок 11, жестко закрепленных на концах осей 12, проходящих по свобод ной посадке через отверстия в корпусе 10. Фигурные планки 11(фиг. 2) имеют радиусную выемку 13 для приема деталей, радиусный затылок 14 для упора в них деталей с предыдущих позиций, выполненный по дуге окружности с радиусом в центре оси 12,пра вое плечо 15, на которое нажимает транспортируемая деталь 4, и нижнее плечо 16. Центр тяжести опорной peiMки находится слева от оси 12 и в свободном состоянии опорные рамки по ворачиваются против часовой стрелки в нижнее положение. Число опорных рамок равно количеству позиций направляющих гребенок. В направляющих .пазах стоек 9(фиг. 1) расположена штанга 17 с толкателями 18, число которых равно числу опорных рамок и каждый из которых взаимодействует с нижним плечом 1&(фиг. 2) соответствующей фигурной планки 11 при возвратно-поступательном движении штан1ги 17 от силового цилиндра 19. Опорные рамки разнесены в шахмат ном порядке за счет равной длины осей 12 (фиг. 1), и разнесены соответствующие толкатели 18 на . штанге 17 для того, чтобы толкатели 18.при возвратно-поступательном движении штанги 17 взаимодействовали только с одной опорной рамкой. Кронштейн 20(фиг. 2) с кулачком 21 жестко закреплен на конце штанги 17 и служит для кинематической связи штанги 17 с направляющими гребенками 2 через рычажную систему, состоящую из двуплечего рычага 22(фиг. и 5) и двух рычагов 23, установле ных неподвижно на валу 24, имеющем возможность поворота вокруг своей оси в опорах 25. Концы рычагов 23 входят в пазы 26(фиг. 2 направляющих гребенок 2. Шаговый конвейер накопитель работает следующим образом. На фиг. 2 показано положение деталей в конце хода штанги 17 влево. При этом фигурныепланки 11 опорных рамок находятся в поднятом положении под воздействием толкателей 18 штанги 17 на нижние плечи 16 фигурных планок 11. Рычажная система, состоящая из двуплечего рычага 22 и двух рычагов 23, повернута по часовой стрелке в крайнее положение, и на|правляющие гребенки 2 находятся в . крайнем правом положении. Транспортируемые детсши 4 лежат между выг ступами 3(фиг. 3) направляющих гребенок 2, упираясь в радиусные затылки 14 и нажимая на правые плечи 15 фигурных планок 11. При движении штанги 17 от силового цилиндра 19 вправо ее толкатели 18 отходят от нижних плеч 16 фигурных планок 11. Те опорные рг1мки, которые не нагружены транспортируемыми деталями, поворачиваются в силу своей неуравновешенности в нижнее положение (опорная рамка Е на фиг. 2 и ЗЬ |Остальные опорные рси«1ки не могут по- i вернуться, так как они не нагружены транспортируемыми деталями. В начале хода штанги 17 вправо кулачок 21 движется под левым плечом двуплечего рычага 22, не поворачивая el-o. При встрече кулачка 21 с правым плечом двуплечего рычага 22 вал 24 начинает поворачиваться, поворачивая рычаги 23 против часовой стрелки и перемещая направляющие гребенки 2 влево. Выступы 3 направляющих гребенок 2 достигают до транспортируемых деталей 4 и в конце хода штанги 17 вправо перемещают их влево . освобождая радиусные затылки 14 фигурных планок 11 от воздействия транспортируемых деталей (фиг. 3). Освободившиеся опорные рамки при этом поворачиваются в нижнее положение (опорные рамки В и Д на фиг. 3). Остальные опорные рамки, на правом плече 15 которых имеются детали, не могут повернуться в нижнее положение. ; При движении штанги 17 влево кулачок 21 поворачивает рычажную сиртему по часовой стрелке, воздействуя на левое плечо двуплечего рычага 22, при этом гребенки 2 перемещаются вправо. Детали, отодвинутые выступами 3 гребенок 2 от радиусных затылков 14 фигурных планок 11, возвращаются и упираются в радиусные затылки 14 поднятых опорных рамок, а детали, лежащие перед опущенными опорными рамками, заходят в радиусные выемки 13 фигурных планок 11 опорных рамок 1,на фиг. 4 опорные рамки В и .Д). При дальнейшем движении штанги 11 влево кулачок 21 выходит из контакта с левым плечом двуплечего рычага 22, и перемещение гребенок 2 вправо прекращается. Толкатели 18 доходят, до соприкосновении с нижним плечом 16 фигурных планок 11 опущенных опорных рамок и начинают поворачивать их по часовой стрелке. При этом детали, лежащие в радиусных выемках 13 фигурных планок, поднимаются вместе с опорными рамками и скатываются по наклонной поверхности выступов 3 в соседнюю справа позицию гребенок 2 (фиг.4 детали, лежащие в радиусных выемках опорных рамок В и Д). Толкатели 18 поднятых опорных рамок доходят до соприкосновения с нижним плечом 16 их фигурных планок только в конце хода штанги 17 влево, и положение этих опорных рамок и деталей, лежащих на них, не изменяется. Так происходит постепенное автоматическое заполнение свободных позиций гребенкой и транспортирование детдлей на транспортере.
Такой конвейер-накопитель прост по конструкции, имеет высокую надежность, так как увеличивается долговечнсэсть опорных рамок, обеспечивае бесперебойное транспортирование детлей, уменьшает простой автоматической линии.
Формула изобретения
1. Шаговый конвейер-накопитель, содержащий направляющие гребенки, неподвижный корпус, на котором шарнирно закреплены неуравновешенные опорные рамки, установленную с возможностью возвратно-поступательного движения штангу с толкателями для взаимодействия с опорными рамками, отличающийся тем, что, с
0 целью повышения надежности работы конвейера, направляющие гребенки установлены с возможностью возвратнопоступательного движения посредством кинематической связи их со штангой.
5
.2. Конвейер-накопитель по п. 1, отличающийся тем, что кинематическая связь направлякмцих гребенок со штангой выпол-нена в виде шарнирно закрепленного на неподвижной опоре трехплечего рычага, одно плечо
0 которого шарнирно связано с гребенками , а штанга снабжена кулачком для взаимодействия с двумя другими плечами рычага.
5
Источники информации, принятые во внимание при экспертизе
1.Патент США 3270864, кл. 198219, опублик. 06.09.66.
2.Технология и оборудование
D механосборочного производства. Экспресс-информация, № 25, М., 1975, с. 19(прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шаговый конвейер-накопитель | 1986 |
|
SU1346527A1 |
| Шаговый конвейер-накопитель | 1980 |
|
SU960098A1 |
| ГРЕБЕНЧАТЫЙ КОНВЕЙЕР-НАКОПИТЕЛЬ ДЛЯ ВАЛОВ | 1995 |
|
RU2098336C1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Автомат для обработки электромонтажных проводов | 1984 |
|
SU1292089A1 |
| Шаговый конвейер | 1980 |
|
SU933571A1 |
| Гребенчатый конвейер-накопитель для валов | 1985 |
|
SU1313772A1 |
у/у/:У////////////////////////////////////// ////////////////////
Л/ 1Z фиг / В Г А Е
-2
гь.
-гз
S
ts 13 IS j г
2
гб -гз
25
(pufS ..К
