1
Изобретение относится к машиностроению и может быть использовано для бесступенчатого изменения передаточного отношения в коробках передач транзисторных средств.
Цель изобретения - упрощение изменением передаточного отношения в зависимости от передаваемой нагрузки и повышение тяговой способности вариатора.
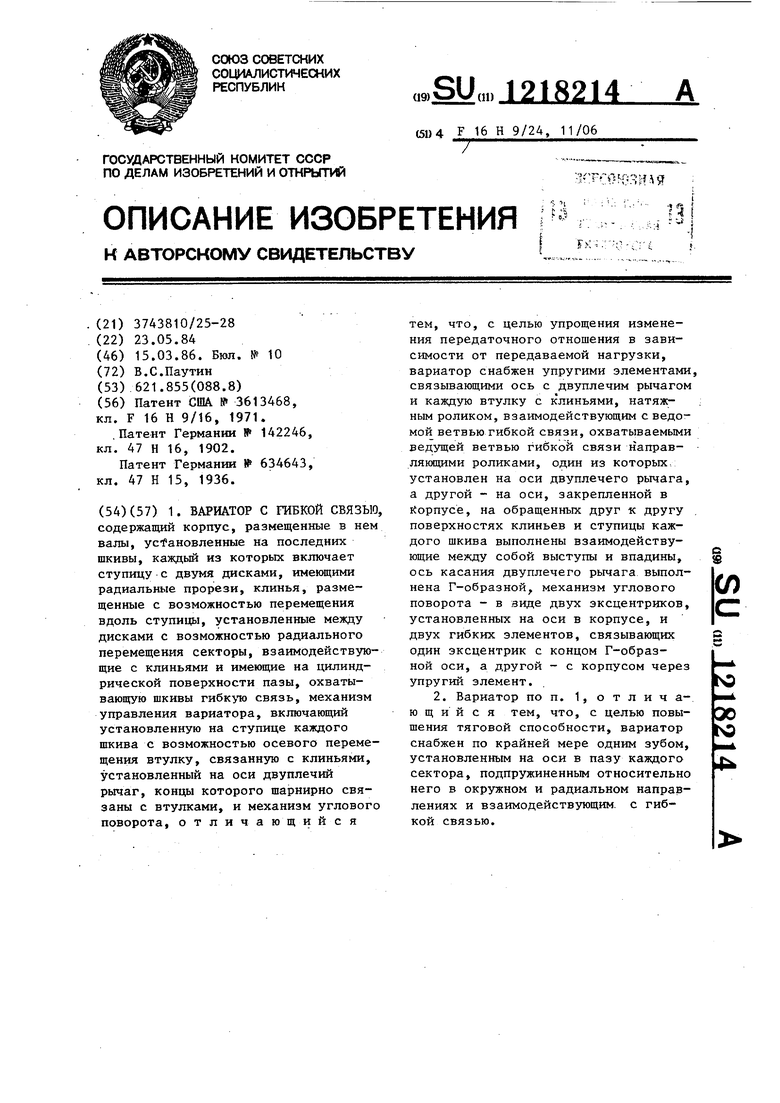
На фиг. 1 изображен вариатор. общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вариант выполнения одного из секторов вариатора.
Вариатор содержит корпус (не показан) , размещенные в нем валы 1 и 2, установленные на валах ведущий и ведомый шкивы, каждьпЧ из кот орых включает ступицу 3 с двумя дисками 4 имеющими радиальные прорези, клинья 5 размещенные в прорезях дисков с возможностью перемещения вдоль ступицы, секторы 6, установленные между дисками с возможностью радиального перемещения. Секторы 6 имеют цилиндрическую наружную поверхность с пазами, соответствующими профилю гибкой связи 7 и взаимодействуют с клинья- ми 5. На обращенных друг к другу поверхностях клиньев 5 и ступицы 3 выполнены взаимодействующие между собой на дуге обхвата шкива гибкой связью 7 выступы и впадины.
Механизм управления вариантом включает установленную на ступице 3 каждого шкива втулку 8, связанную с клиньями 5 посредством упругих элементов 9, установленный на Г-образной оси 10 и связанньш с ней упругим элементом 11 двуплечий рычаг 12, концы которого шарнирно связаны со втулками. На Г-образной оси 10 и на оси корпуса установлены направляющие ролики 13 и 14, охватываемые ведущей ветвью гибкой связи. Со стороны, ведомой ветви гибкой связи установлен натяжнрй ролик 15. Механизм углового поворота рычага выполнен в виде двух эксцентриков 16 и 17, установленных на оси в корпусе, и двух гибких элементов 18 и 19, связывающих один - эксцентрик 16 с концом Г-образной оси 10, а другой - эксцентрик 17 с корпусом через упругий элемент 20. Каждый сектор 6 может иметь по крайней мере один зуб 21, установленный на оси в пазу сектора и подпружиненньм относительIA2
но него в окружном и радиальном направлениях (фиг. 1 и 3). В ступице 3 каждого шкива могут быть выполнены пазы для размещения упругих элементов 22, предназначенных для принудительного расклинивания взаимодействующих между собой выступов и впадин ступицы и клиньев 5 на участках шкива, не охватываемых гибкой связью
(фиг. 2).
Вариатор работает следующим образом.
Крутящий момент от двигателя (не показан) передается от ведущего вала 1 к ведомому валу 2 через ступицу 3, диски 4 и секторы 6 с зубьями 21 ведущей ветви гибкой связи 7, охватывающей направляющие ролики 13 и 14. При изменении нагрузки на ведомом валу 2 изменяется соответственно и натяжение ведущей ветви гибкой связи 7 и усилие ее воздействия на направляющий ролик 13, установленньй на Г-образной оси 10. В том случае, если усилие натяжения ведущей ветви гибкой связи превышает усилие упругого элемента 20, связанного через гибкие элементы 18 и 19 и эксцентрики 16 и 17 с концом Г-образной оси 10, то двуплечий рычаг будет поворачиваться вокруг оси 10 по часовой стрелке (фиг. 2). Если же усилие упругого элемента 20 превышает усилие натяжения ведущей ветви гибкой связи, то вращение двуплечего рычага будет происходить в противоположном направлении. При равенстве усилий натяжения упругого элемента 20 и ведущей гибкой связи 7 двуплечий рычаг остается в исходном положении. Вращение рычага в ту или иную сторону приводит к осевому перемещению втулок 8 каждого шкива и связанных с ними через упругие элементы 9 клиньев 5 с секторами 6, не охватываемых гибкой связью 7. Сектора 6, охватываемые гибкой связью 7, остаются в этот момент неподвижными в радиальном направлении, так как взаимодействующие с ними клинья 5 сцеплены со ступицей 3 при помощи выступов и впадин. За один оборот валов 1 и 2 все клинья 5 с секторами 6, не охватываемые гибкой связью, переместятся вдоль ступицы и займут положение, соответствующее уравновешенному положению двуплечего рычага 12, в результате изменится радиус расположения секторов 6 на ведущем и ведомом шкивах, и увеличится или уменьшится передаваемый на ведомый вал крутящий момент, соответствующий изменившейся нагрузке на ведомый вал. Путем подбора характеристики упругого элемента 20 и профилей эксцентриков 16 и 17 можно задать вариатору любую нужную
18214
характеристику. Наличие же по крайней мере одного зуба 21, установленного на оси в пазу сектора 6, позволяет исключить проскальзывание гиб- 5 кой связи 7, компенсировать возможность несовпадения шага зубьев 21 с шагом цепи и повысить в целом тяговую способность вариатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вариатор с гибкой связью | 1982 |
|
SU1149088A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| Вириатор | 1986 |
|
SU1359527A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |
| Механизм привода плоскорежущего рабочего органа почвообрабатывающей машины | 1990 |
|
SU1748684A1 |
| Упруго-предохранительная муфта | 1979 |
|
SU804937A1 |
| Механизм регулируемого эксцентрикового узла | 1989 |
|
SU1700294A1 |
| Автоматический клиноременный вариатор скорости | 1989 |
|
SU1758316A1 |
| АВТОМАТИЧЕСКИЙ ПЕРЕНАЛАЖИВАЕМЫЙ ФРИКЦИОННЫЙ КЛИНОРЕМЕННЫЙ ВАРИАТОР | 2011 |
|
RU2489622C1 |
| Двухколесный велосипед | 1989 |
|
SU1754561A1 |
Вид А
:4
BHrafflii
Тираж 880
Заказ 1121/48 Подписное
Фиг. 3
Филиал ПИП Патент,
г. Ужгород, ул. Проектная, 4
| Патент США № 3613468, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство, выполняющее роль упора на бурильной трубе | 1961 |
|
SU142246A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Устройство для физико-химической очистки газов | 1974 |
|
SU634643A3 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
