Изобретение относится к горно- добьдаающей промьшшенности и может быть использовано .при добыче полезных ископаемых драгами.
Целью изобретения является повышение точности поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой
цепи драги.
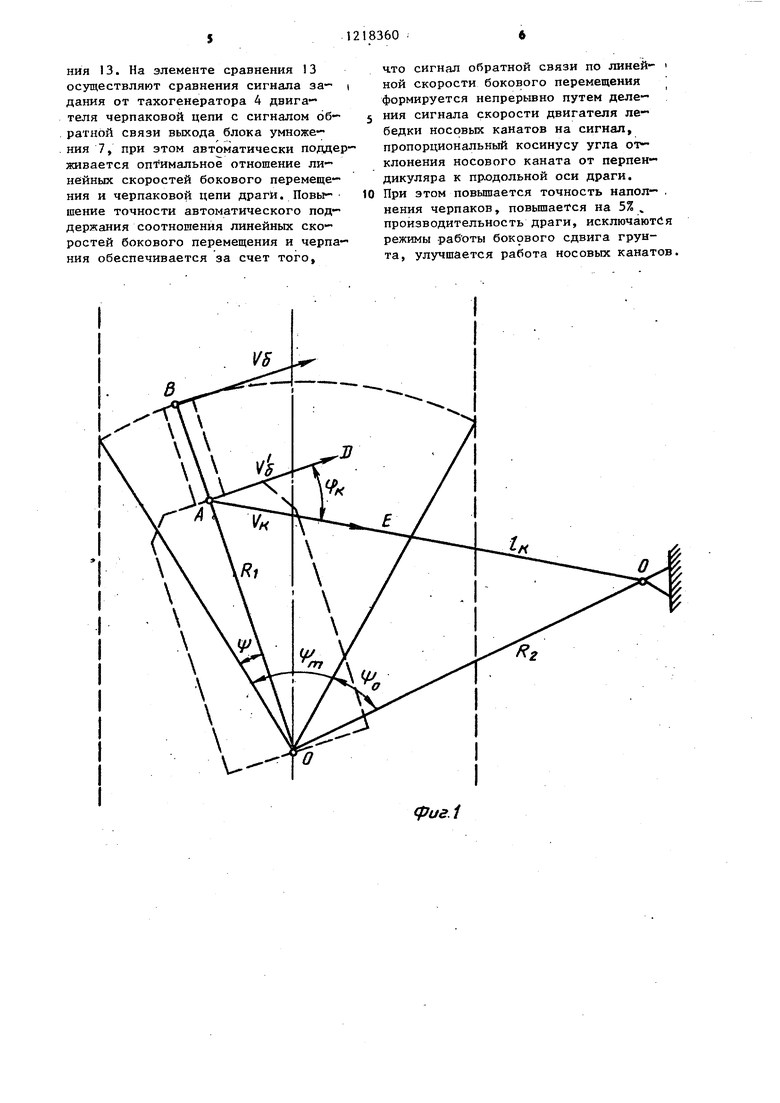
На фиг, 1 показана схема размещения драги в забое; на фиг. 2 - блок- схема устройства. На фиг. 1 приняты следующие обозначения:
ОВ Rap - ра диус драгирования;
дд и расстояние до носового
блока;
QC )j расстояние до берегового блока;
АС f). - длина носового каната; (( - текущий угол поворота драги
от vrna забоя;
(J - максимальный угол разворота
W ,
драги;:
(fg - начальный угол; LDAE Ч к угол отклонения носового каната от перпендикуляра к продольной оси драги;
YH - скорость каната;
Vr. - скорость бокового перемещео . ния черпаков;
Vr. - скорость бокового перемещения носового блока.
Черпаки при черпамни находятся от оси вращения на расстоянии OB-Kj, носовой блок - на расстоянии ОА R,.
(2)
10
где f. - радиус барабана лебедки иосовых канатов;
1р - передаточное число редуктора лебедки;
Кд - передаточный коэффициент. Тогда с учртом (1) и (2) окончательно получаем
ЧР
5 - R, K cos
()
IS
20
25
Таким образом, согласно предлагаемому способу сигнал обратной связи по скорости формируется путем деления сигнала скорости двигателя лебедки на косинус угла отклонения носового каната от перпендикуляра к продольной оси драги.
Способ и устройство обладают высокой точностью. Из схемы, приведенной на фиг. 2f справедливы следующие соотношения: iOAC 90 - Ч
(4)
30
siт 10АС gin L ДОС
. AOC.)
(5) (6)
e -- |Rt+R 2-R,-Rz CosLftOci С)
nuv-i owri - - -35 Совместное решение С)С5), (6)
Поэтому отношение линейных скоростей j
бокового перемещения YS Й4Р
(«.чДъ -™-1-- -
V «1
У
. „ v . - 40
откуда Vg - Yjv
. RI
cos су )
4Rf Rl- 2R,-Ra-co5(()
Из схемы на фиг. 2 следует
или V
v .il
k D
4
coStPK
; Из полученного выражения следует, что, измеряя скорость каната и угол , отклонения каната от перпендикуляра к продольной оси драги, однознач но определяют скорость бокового перемещения драги.
Согласно предлагаемому способу в.устройстве измеряют не скорость каната, а скорость двигателя лебедки носовых канатов -,П , связанных функциональной зависимостью
(2)
где f. - радиус барабана лебедки иосовых канатов;
1р - передаточное число редуктора лебедки;
Кд - передаточный коэффициент. Тогда с учртом (1) и (2) окончательно получаем
ЧР
5 - R, K cos
()
Таким образом, согласно предлагаемому способу сигнал обратной связи по скорости формируется путем деления сигнала скорости двигателя лебедки на косинус угла отклонения носового каната от перпендикуляра к продольной оси драги.
Способ и устройство обладают высокой точностью. Из схемы, приведенной на фиг. 2f справедливы следующие соотношения: iOAC 90 - Ч
(4)
siт 10АС gin L ДОС
. AOC.)
(5) (6)
e -- |Rt+R 2-R,-Rz CosLftOci С)
cos су )
4Rf Rl- 2R,-Ra-co5(()
откуда
45
costfk
((f(
,.R,cos() o-Vj
(8)
имеет вид
50
8.
R,-Rj (Vm- ti o-t« l ; A R Rj-2R,-(j-cos((j)i|)o-V)
Л9)
55
Сравнивая это выражение для о( с выражением (8) для cos ifj( , получим
ЧР
R,
(10)
Из приведенного следует, что график изменения costf при движении драги по забою в определенном масштабе представляет собой график изме .нения «5 . Следовательно, в методическом отношении погрешность предлагаемого способа по сравнению с прототипом равна нулю.
Предлагаемые способ и устройство .автоматического поддержания оптималного отношения линейных скоростей бокового перемещения и черпания обладают более высокой точностью измерения.
Измерение угла отклонения носового каната от перпендикуляра к продольной оси драги и использование косинуса этого угла для формирования сигнала обратной связи по линейной скорости бокового перемещения драги, а также наличие датчика угла отклонения носового каната от перпендикуляра к продольной оси драги и функционального блока обеспечивают достижение поставленной цели.
I
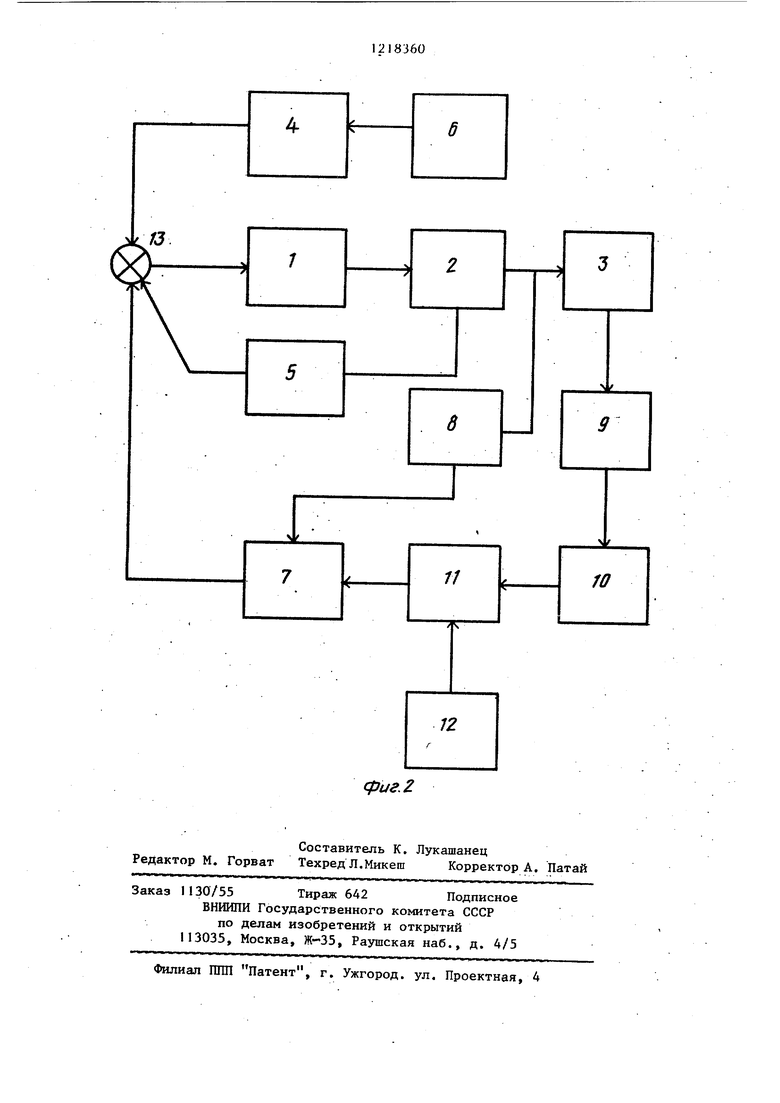
Устройство содержит электропреоб разователь i, двигатель лебедки но- совых канатов 2, драгу 3, тахогене- ратор двигателя черпаковой цепи 4, блок токовой отсечки 5, двигатель черпаковой цепи 6, .блок умножения 7 тахогенератор двигателя лебедки носовых канатов 8, датчик угла отклонения носового каната от перпендикуляра к продольной оси драги 9, функциональный преобразователь 10, блок деления 11, датчик радиуса драгирования 12, сумматор 13, причем выход сумматора 13 соединен с входом электропреобразователя 1 двигателя лебедки носовых канатов 2, а первый вход сумматора 13 соединен с выходом тахо- генератора 4 двигателя черпаковой цепи 6, второй вход - с выходом блока токовой отсечки 5, защищающего двигатель лебедки носовых канатов IOT перегрузок, и третий вход соединен с выходом блока умножения 7 первый вход которого соединен с выходом тахогенератора 8 двигателя лебедки носовых канатов, а второй вход - с выходом блока деления 11, один из входов которого соединен с выходом датчика радиуса драгирова10
15
183604
ния 12. Выход датчика угла отклонения носового каната от перпендикуляра и продольной оси драги 9 соединен с входом функционального пре- с образователя 10, выход которого соединен с вторым входом блока деления 1.1.
В качестве датчика угла отклонения носового каната от перпендикуляра к продольной оси драги используют, например, прецезионный потенциометр, связанный с поворотной обоймой носового блока.
Способ и устройство функционируют следующим образом.
На вход элемента сравнения 13 электропреобразователя 1 двигателя лебедки носовых канатов подают задающий сигнал с тахогенерато- ра двигателя черпаковой цепи А, При этом включают двигатель лебедки носовых канатов 2 и осуществляют поворот драги З.При повороте непрерывно измеряют скорость двигателя лебедки носовых канатов тахогенера- тором 8, сигнал с которого подают .
на вход блока умножения 7(U Пд- -г
ЛА /
Сигнал с датчика 9 подается на функциональный преобразователь 10, 30 выходной сигнал которого (jIg пропорционален косинусу угла отклонения носового каната от перпендикуляра к продольной оси драги, т.е. собС||. Сигнал с выхода блока 10 подается на один из входов блока деления 11, на второй вход,которого подается сигнал с выхода датчика радиуса драгирования 12. На выходе
20
25
35
5лока деления I 1 получают сигнал
И«.
40
45 Сигнал с выхода блока деления 11 подается на второй вход блока умножения, на первый вход которого подает- ся сигнал с тахогенератора 8.На выходе блока умножения 7 получают сцг50 нал, пропорциональный линейной скорости бокового перемещения драги.
R
,.K coecf/
Сигнал с выхода блока умножения 7 подается в виде отрицательной обратной связи на вход элемента сравне-
ния 13. На элементе сравнения 13 осуществляют сравнения сигнала за- i Дания от тахогенератора 4 двигателя черпаковой цепи с сигналом обратной связи выхода блока умножения 7, при зтом автоматически поддерживается оптимальное отношение линейных скоростей бокового перемещения и черпаковой цепи драги. Повышение точности автоматического поддержания соотношения линейных скоростей бокового перемещения и черпания обеспечивается за счет того,
что сигнал обратной связи по линей- ной скорости бокового перемещения формируется непрерьшно путем деле-
иия сигнала скорости двигателя лебедки носовых канатов на сигнал, пропорциональный косинусу угла отклонения носового каната от перпендикуляра к пр-одольной оси драги.
При этом повышается точность напол- , нения черпаков, повьш1ае Гся на 5% , производительность драги, исключаются режимы раб оты бокового сдвига грунта, улучшается работа носовых канатов,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля скорости бокового перемещения свайной драги | 1985 |
|
SU1288273A1 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
| Устройство автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги | 1980 |
|
SU899756A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство для контроля угла разворота свайной драги | 1987 |
|
SU1506030A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |

fpue.i
Составитель К. Лукашанец Редактор М. Горват Техред Л.Микеш Корректор А.
Заказ I130/55 Тираж 642 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ГШП Патент, г. Ужгород, ул. Проектная, 4
фиг.г
| Савельев А.А., Багаутинов Г.А | |||
| Исследование статистических и.ди- намических свойств устройства изме рения поворота драги | |||
| Изв.-вузов, Горный журнал, 1972, № 4, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
