11
Изобретение относится к горно-добывающей промышленности и может быть использовано при добыче полезных ископаемых драгами.
Цель изобретения - повышение точности контроля скорости бокового перемещения драги.
На фиг. 1 показана блок-схема устройства; на фиг. 2 - датчик радиуса навивки каната, вид спереди; на фиг. 3 - то же, вид сбоку.
Устройство содержит тахогенера- тор 1 двигателя лебедки носовых канатов, выход которого подключен на первый вход первого блока 2 умножения, датчик 3 угла отклонения каната от перпендикуляра к продольной оси драги выход которого подключен к входу функционального преобразователя 4, выход которого подключен к
первому входу блока 5 деления, к второму входу которого подключен выход датчика 6 радиуса драгирования, а выход блока деления подключен к второму входу первого блока 2 умножения, датчик 7 радиуса навивки каната на барабан лебедки носовых канатов, вьгход которого подключен к пер- вому входу второго блока 8 умножения к второму входу которого подключен выход первого блока 2 умножения, а выход второго блока 8 умножения подключен к входу указателя 9 скорости.
В качестве датчика угла отклонения каната от перпендикуляра к продольной оси драги используют, например, прецезионньй потенциометр, связанный с поворотной обоймой носового блока.
Датчик имеет ось 10 с жестко закрепленными на ней поперечными штангами 11, на концах которых закреплены прижимные башмаки 12. Прижатие башмачка 12 к поверхности барабана 13 лебедки носовых канатов осуществляется пружиной 14. При навивке каната на барабан лебедки пропорционально изменению радиуса навивки изменяется угол поворота оси 10. Для преобразования угла поворота оси 10 в электрический сигнал установлен прецезионный потенциометр 15
Для определения скорости бокового перемещения драги в предлагаемом устройстве используется следующая зависимость:
п
1
R К. cosi.
(1)
где Vt
п
л
R3P
Ч к
к.
скорость бокового перемещения драги|
частота вращения двигателя лебедки носовых канатов; расстояние от оси сваи до носового блока; радиус драгирования; угол отклонения носового каната от перпендикуляра к продольной оси драги; передаточный коэффициент.
30 . 1„
К
(2)
0
5
где 1р - передаточное число редуктора лебедки носовых канатов; rg - радиус барабана лебедки. Подставляем выражение (2) в зависимость (1) и получаем выражение для скорости бокового перемещения драги.
Vs
п
R
вр
7 -ifi. 1(3)
R 30 1„ cos4.
30
Для драги определенного типа R постоянны.
Обозначим
К.
Sr
30
Ri
(4)
где
К.лкоэффициент, постоянный для данного типа драги.
Тогда Vg
К.
п.
R
1
ЭР В cos
(5)
5
0
5
Из выражения (5) следует, что дли повышения точности контроля скорости необходимо кроме контроля параметров п , зp,f контролировать величину радиуса навивки каната на барабан лебедки г.
Устройртво функционирует следующим образом.
С тахогенератора 1 в соответствии с алгоритмом зависимости (5) снТшается сигнал,пропорциональный ско-. рости двигателя лебедки носовых канатов и J К . п , который подается на первьш вход первого блока 2 умноженияi С датчика 3 угла отклонения носового каната от перпендикуляра к продольной оси драги 3 снимается сигнал, пропорциональный
углу к 3 | который подается на функциональный преобразователь 4, с которого снимается сигнал, пропорциональный cos f , т,е
cos Y. Этот сигнал подается на
первый вход блока 5 деления, на второй вход которого подается сигнал Ug, пропорциональный радиусу драгирования и . С вькода блока деления снимается сигнал
и
J
который подается на
5 cosf
второй вход первого блока 2 умножения. С выхода блока 2 умножения снмается сигнал
и К .
2 1
п R
1
А Р cos4
который подается на первый вход второго блока 8 умножения. С датчика 7 радиуса навивки каната на барабан лебедки носовых канатов снимается сигнал, пропорциональный радиусу навивки и Tg , который подается на второй вход второго блока 8 умножения, с выхода которого снимается сигнал, пропорииональньтй скорости бокового перемещения драги. U.
IS
V,
к
п.
R, г.. 9р 5
кото1
л Эр 6 cos4 рый подается .на указатель 9 скорости.
ю
15
фиг. 2
10
2882734
Формула изобретения
Устройство для контроля скорости бокового перемещения свайной драги, содержащее тахогенератор двигателя лебедки носовых канатов, выход которого подключен к первому входу первого блока умножения, датчик угла отклонения носового каната от перпендикуляра к продольной оси драги через функциональный преобразователь подключен к первому входу блока деления, на второй вход которого подключен датчик радиуса драгирования, а выход блока деления подключен к второму входу первого блока умножения, и указатель скорости бокового перемещения драги, о т- ли чающееся тем, что, с целью повышения точности контроля оно снабжено датчиком радиуса навивки каната на барабан лебедки носовых канатов и вторым блоком умножения, причем выход датчика радиуса навивки каната подключен к первому входу второго блока умножения, к второму входу которого подключен выход первого блока умножения, а выход второго блока умножения ,- подключен на вход указателя скорости бокового перемещения драги.
15
20
25
30
/7
73
фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги и устройство для его осуществления | 1984 |
|
SU1218360A1 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
| Устройство для контроля угла разворота свайной драги | 1987 |
|
SU1506030A1 |
| Устройство автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги | 1980 |
|
SU899756A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство для определения глубины опускания черпаковой рамы | 1990 |
|
SU1784719A1 |
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
Изобретение относится к горнодобывающей промьгашенности и может быть использовано при добыче полезньпс ископаемых драгами. Изобретение позволяет с высокой точностью контролировать скорость бокового перемещения драги. Для этого датчиками 1, 3, 6 и 7 измеряются соответственно скорость двигателя лебедки носового каната (НК) |,угол Ч отклонения НК от перпендикуляра к продольной оси драги и радиусы драгирования навивки г НК на барабан лебедки. Сигналы с датчиков 1, 3, 6 и 7 подаются на соответствующие блоки деления 5 и умножения 2 и 8,с помощью которых вычисляются скорость Vg бокового перемещения драги по зависимости Vg К„ л R Зр Tg I/COSH . Вычисленная скорость Vg регистрирует указатель 9 скорости. 3 ил. (Л ю 00 00 ю м 00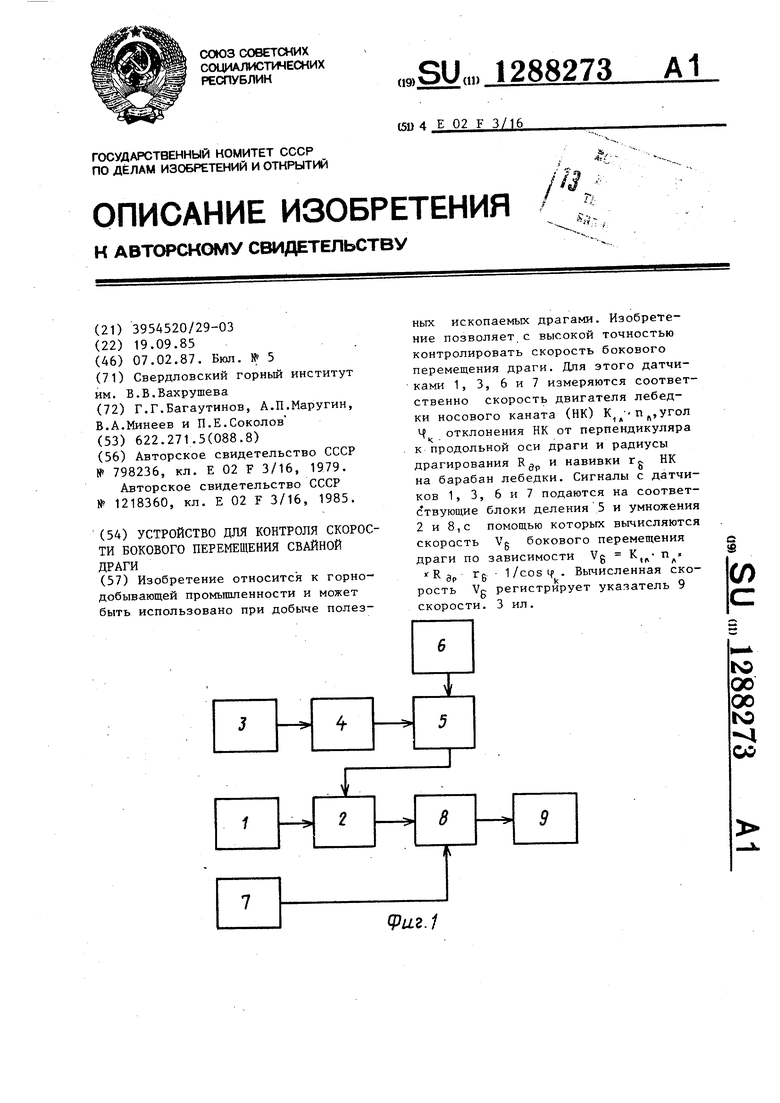
Редактор Н.Тупица Заказ 7777/26
Составитель В.Чуприн
Техред Л.Сердюкова Корректор И.Муска
Тираж 628 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги и устройство для его осуществления | 1984 |
|
SU1218360A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
