(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ
ОПТИМАЛЬНОГО ОТНОШЕНИЯ ЛИНЕЙНЫХ СКОРОСТЕЙ
БОКОВОГО ПЕРЕМЕЩЕНИЯ И ЧЕРПАКОВОЙ ЦЕПИ ДРАГИ
1
Изобретение относится к экскавации и перемещению грунта, а именно к устройствам управления добычным комплексом драги.
Известно устройство .автоматического поддержания оптимального отношения линейнь1х скоростей бокового перемещения и черпаковой цепи драги, содержащее электропреобразователь двигателя лебедки носовых канатов, ко входу которого подключен выход элемента сравне{1ия, к одному из входов которого подключен ахогенератор двигателя черпаковой цепи, ко, второму - блок токовой отсечки, а к третьему - выход узла умножения вычислительного блока, ко входам блока деления которого подключены выходы тахогенератора двигателя лебедки и блока измерения средней линейной скорости бокового перемещения, ко входу которого подключен блок измерения углового перемещения драги 1.
Однако известное устройство обладает следующими недостатками.
При формировании сигнала обратной связи по линейной скорости в течение всего последующего интервала дискретности для приближения передаточного коэффициента по скорости механизма бокового перемещения драги используют дискретно-постоянный сигнал, уровень которого постоянен в течение этого последующего интервала дискретности. Это снижает точность поддержания оптимального отношения.
Низкая точность поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги приводит к низкой точности поддержания оптимального уровня производительности драги по горной массе, к повышенному расходу электроэнергии добычного комплекса
10 драги. Кроме того, превыщение фактического отнощения скоростей оптимального приводит к повышению механических нагрузок черпаковой цепи и лебедки носовых канатов.
Цель изобретения - повышение точности 5 поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги.
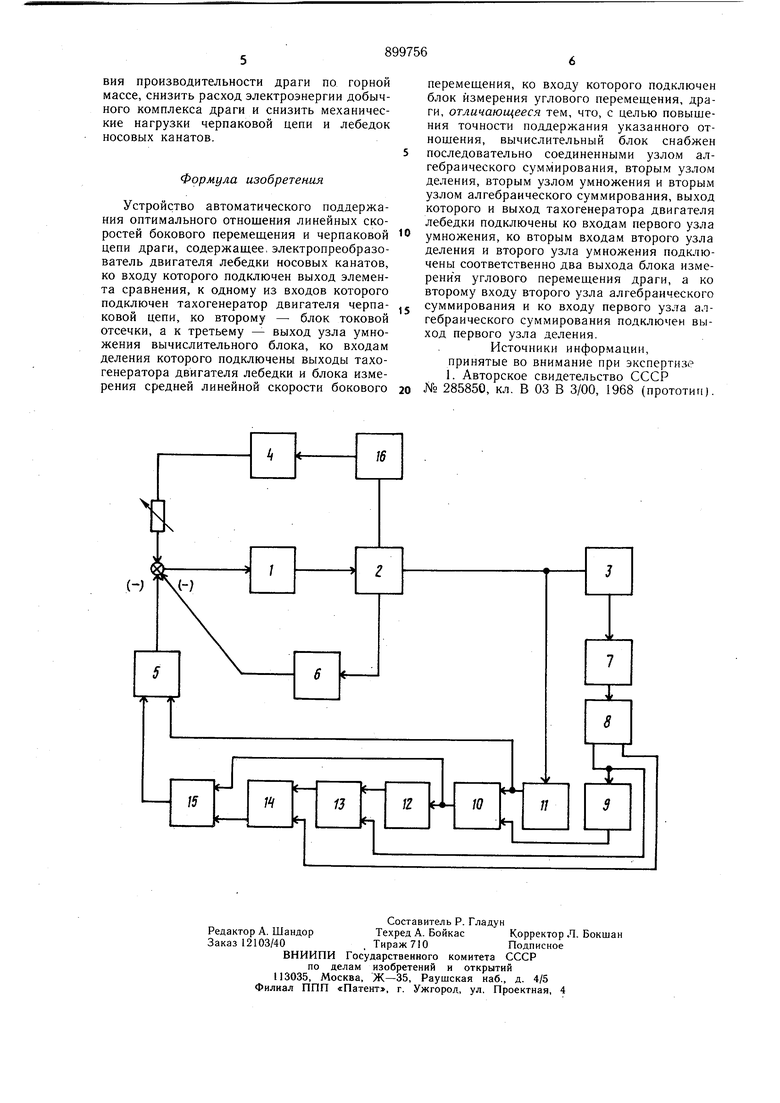
Поставленная цель достигается тем, что вычислительный блок снабжен последовательно соединенными узлом алгебраического 20 суммирования, вторым узлом деления, вторым узлом умножения и вторым уЗлом алгебраического суммирования, выход которого и выход тахогенератора двигателя лебедки подключены ко входам первого узла умножения, ко вторым входам второго узла деления и второго узла умножения подключены соответственно два выхода блока измерения углового перемещения драги, а ко второму входу второго узла алгебраического суммирования и ко входу первого узла алгебраического суммирования подключен выход первого узла деления. На чертеже изображена блок-схема предлагаемого устройства. Устройство включает электропреобразователЕз i, двигатель 2 лебедки носовых канатов, драгу 3, тахогенератор 4 двигателя черпаковой цепи,блок 5 умножения, блок 6 токовой отсечки, блок 7 измерения углового перемещения драги, блок 8 измерения углового перемещения драги от начала интервала дискретности, блок 9 измерения средней динейной скорости бокового перемещения за интервал дискретности, блок 10 деления и памяти, тахогенератор 11 двигателя лебедки, блок 12 памяти и алгебраического суммирования, блок 13 деления и памяти, блок 14 умножения, блок 15 алгебраического суммирования. Устройство работает следующим образом. На вход электропреобразователя 1 подают задающий сигнал скорости двигателя черпаковой цепи от тахогенератора 4, сигнал отрицательной обратной связи по линейной скорости бокового перемещения от блока 5 умножения и сигнал блока 6 токовой отсечки защищающий двигатель 2 лебедки носовых канатов от перегрузок. Сигнал с выхода блока 7 измерения углового перемещения драги, содержащего свободный гироскоп, подают на вход блока 8 измерения углового перемещения драги от начала интервала дискретности, сигнал с выхода которого пропорционален текущему угловому перемещению драги, отсчитываемому от начала интервала дискретности. В конце каждого интервала дискретности производят обработку сигналов. Сигнал с выхода блока 8 подают на вход блока 9 измерения средней линейной скорости бокового перемещения за интервал дискретности, где в конце каждого интервала дискретности осуществляют умножение входного сигнала на сигнал, пропорциональный радиусу черпания драги. Радиус черпания драги зависит от угла наклона черпаковой рамы, измеряемого при помощи сельсина. Сигнал с выхода блока 9 подают на вход блока 10 деления в памяти, на второй вход которого подают сигнал тахогенератора 11 двигателя лебедки, На входе блока 10 в конце каждого интервала дискретности получают дискретнопостоянный сигнал, который подают на вход блока 12 памяти и алгебраического суммирования, где хранят значения дискретнопостоянного сигнала для предыдущего интервала дискретности. На выходе блока 12 пблучают приращение дискретно-постоянного сигнала, подают его на вход блока 13 деления и памяти, на второй вход которого поступает сигнал с выхода блока 8, пропорциональный угловому перемещению драги за интервал дискретности. На выходе блока 13 получают сигнал, пропорциональный отпощению приращения дискретнопостоянного сигнала и сигнала углового перемещения драги за интервал дискретности. На этом заканчивают цикл операций обработки сигналов прощедщего интервала дискретности и далее, непрерывно в течение всего последующего интервала дискретности, формируют приближение передаточного коэффициента по скорости механизма бокового перемещения драги и на его основе - сигнал обратной связи по линейной скорости бокового перемещения. Для этого сигнал с выхода блока 13 подают на вход блока .14 умножения, на второй вход которого подают сигнал с выхода блока 8, пропорциональный угловому перемещению драги от начала интервала дискретности. Сигнал с выхода блока 14 подают на вход блока 15 алгебраического суммирования, на его второй вход подают с выхода блока 10 определенный дискретно-постоянный сигнал. На выходе блока 15 получают сигнал, пропорциональный приближению передаточного коэффициента по скорости механизма бокового перемещения, умножают его в блоке 5 умножения на сигнал тахогенератора 1 двигателя лебедки, пропорциональный частоте вращения двигателя лебедки. На выходе блока 5 получают сигнал обратной связи по линейной скорости бокового перемещения. Оптимальное отношение линейных скоростей бокового перемещения Vg и черпаковой цепи драги V поддерживают путем слежения линейной скорости бокового перемещения драги Vj за заданной скоростью черпаковой цепи, для чего сигнал обратной связи по скорости бокового перемещения формируют умножением сигнала частоты вращения двигателя лебедки носовых канатов на приближение передаточного коэффициента по скорости механизма бокового перемещения. Повыщение точности достигнуто в настоящем устройстве за счет дополнительного определения в конце каждого интервала дискретности приращения дискретно-постоянного сигнала, нахождения отношения определенного приращения дискретно-постоянного сигнала к угловому перемещению драги за интервал дискретности и формирования в течение всего последующего интервала дискретности приближения передаточного коэффициента по скорости механизма бокового перемещения драги путем суммирования полученного дискретно-постоянного сигнала и произведения найденного отнощения на текущее угловое перемещение драги от начала интервала дискретности. Повышение точности поддержания оптимального отношения позволяет повысить точность поддержания оптимального уело
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ОПТИМАЛЬНОГО | 1970 |
|
SU285850A1 |
| Способ автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги и устройство для его осуществления | 1984 |
|
SU1218360A1 |
| Устройство для контроля скорости бокового перемещения свайной драги | 1985 |
|
SU1288273A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство управления положением драги в забое | 1980 |
|
SU870592A1 |
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
