fe

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| Устройство для управления меткой на экране индикатора | 1983 |
|
SU1160451A1 |
| Устройство для считывания координат с экрана электронно-лучевой трубки | 1989 |
|
SU1700568A1 |
| Устройство для выделения контуров изображений объектов | 1990 |
|
SU1785014A1 |
| Устройство для микрофильмированияиНфОРМАции | 1979 |
|
SU842780A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для контроля работы оператора | 1990 |
|
SU1749904A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Бортовое радионавигационное устройство | 1988 |
|
SU1647486A1 |
Изобретение относится к автоматике и может быть использовано при изготовлении чертежей трубопроводов и кабельных линий строительных конструкций электростанций. Цель изобретения - повышение быстродействия устройства за счет избирательной селекции точек считывания. Для этого в устройство введены два реверсивных счетчика, три регистра, два блока памяти, дешифратор, второй элемент И, два элемента ИЛИ, третья группа элементов И и четыре элемента задержки. 2 ил.
Изобретение относится к автоматике и может быть использовано при изготовлении чертежей трубопроводов и кабельных линий строительных конструкций электростанций.
Цель изобретения - повышение быстродействия устройства за счет избирательной селекции точек считывания
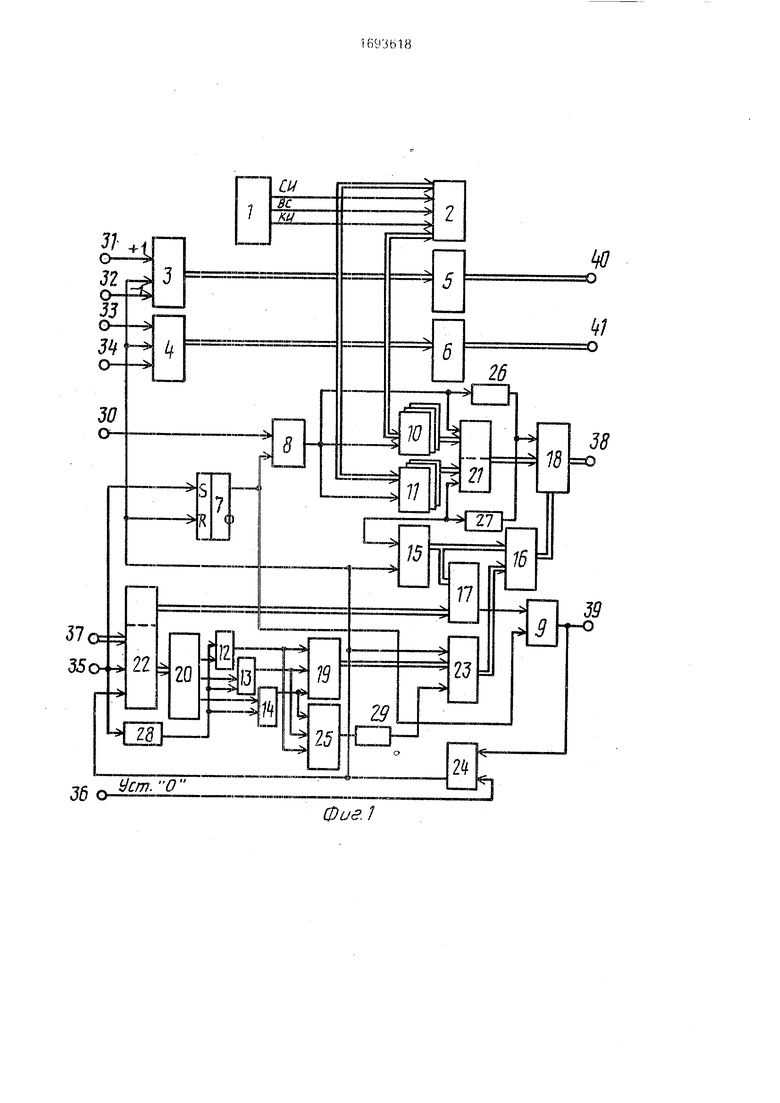
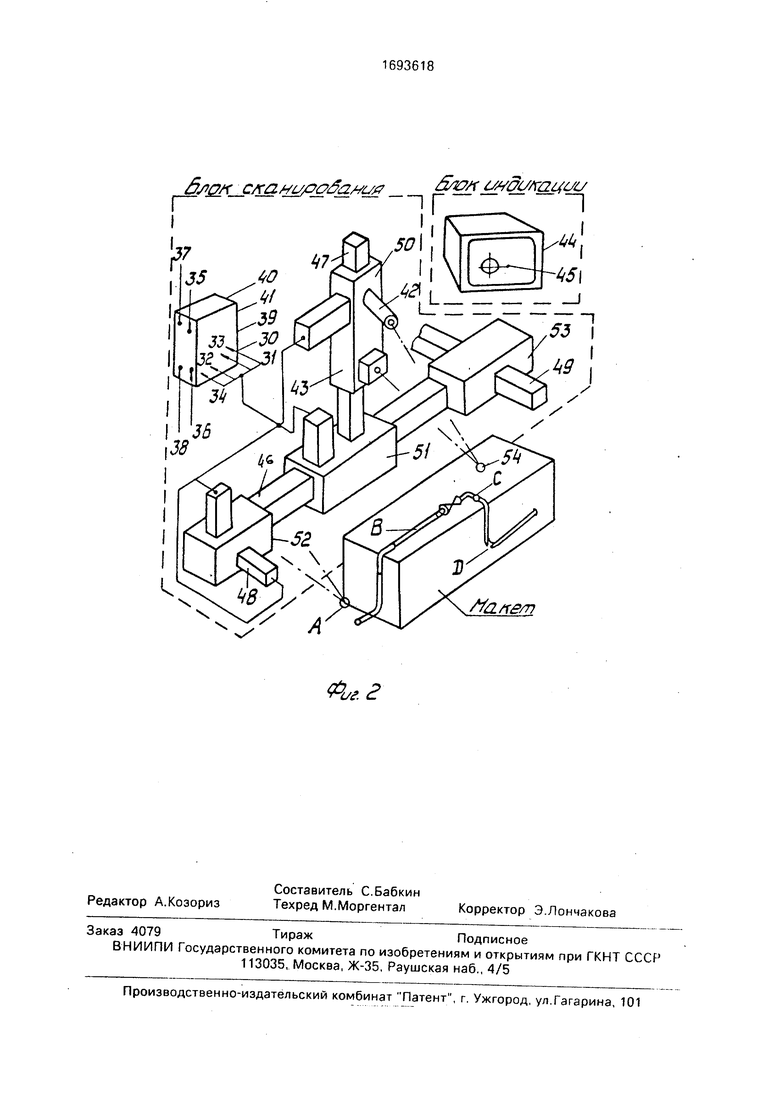
На фиг.1 показана структурная схема предлагаемого устройства; на фиг.2 - пример конструкции системы, осуществляющей сканирование объекта и содержащей в своем составе устройство для считывания координат.
Устройство для считывания координат точек объектов (фиг.1) содержит телевизионный датчик 1, блок 2 видеоконтроля (телемонитор с меткой, визуализирующей на экране положение оптической оси датчика 1), реверсивные счетчики 3 и 4. цифроанало- говые преобразователи (ЦАП) 5 и 6, триггер 7, первый 8 и второй 9 элементы И, первую
10, вторую 11 и третью 12 - 14 группы элементов И, счетчик 15, сумматор 16, компаратор 17, первый 18 и второй 19 блоки памяти, дешифратор 20, первый 21, второй 22 и третий 23 регистры, первый 24 и второй 25 элементы ИЛИ, первый 26, второй 27, третий 28 и четвертый 29 элементы задержки. Устройство имеет также первый 30 - седьмой 36 управляющие входы, информационные вход 37 и выход 38 и управляющие выходы 39-41.
Устройство содержит также элементы, обеспечивающие сканирование объекта (фиг.2): лазер 42, смонтированный вместе с телевизионным датчиком (телекамерой 43), телевизионный монитор 44 с подвижной прицельной меткой 45, направляющие 46 - 49 соответственно по осям X, Y, Z, подвижные платформы 50 - 53. В рабочей точке 54 на поверхности объекта (макета) пересека(
ю
W
Os
со
ются оптические оси телекамеры 43 и луча лазера 42.
Устройство работает следующим образом.
Перед началом работы с входа 36 все узлы и блоки устанавливаются в исходное состояние. Затем оператор с пульта управления (не показан) через вход 37 вводит код признака обьекта, подлежащего обработке, и код числа опорных точек, т.е. физических точек на поверхности этого объекта, совокупность которых однозначно определяет пространственную форму и геометрические размеры самого обьекта в целом,
Структура кода, заносимого с входа 37 по синхроимпульсу, поступающему с входа 35 в регистр 22, имеет следующий вид:
Код идентификатора физического обьекта поступает на вход дешифратора 20, который расшифровывает его и на одном из своих выходов открывает по одному входу один из элементов И 12-,- 14 третьей группы, соответствующей идентификатору физического объекта, а на другой вход этого же элемента И поступает импульс, задержанный элементом 28 на время записи кода в регистр 22.
С выхода указанного элемента И импульс поступает как на вход фиксированной ячейки блока 19 памяти (ПЗУ), так и через элемент ИЛИ 25 на вход элемента 29 задержки. Поступая на вход считывания фиксированной ячейки ПЗУ 19, где хранится базовый адрес области памяти, отводимой для записи координат опорных точек физического обьекта, импульс считывает его на вход регистра 23, куда код и заносится синхроимпульсом, поступающим с выхода элемента 29 задержки.
Базовый адрес первой ячейки памяти, отводимой для записи координат первой опорной точки, поступает на один вход сумматора 16, на другой вход которого поступает код со счетчика 15. Поскольку счетчик 15 в исходном состоянии сброшен, то на выходе сумматора 16 устанавливается базовый адрес первой ячейки памяти, который поступает на адресный вход блока 18 памяти, выполненного в виде оперативного запоминающего устройства (ОЗУ), Кроме того, при занесении кода в регистр 22 тот же импульс с входа 35 поступает на единичный вход триггера 7 и устанавливает его в единичное состояние, при котором высокий потенциал с прямого выхода триггера 7 открывает по
одному входу элементы И 8 и 9. После этого, управляя с пульта управления перемещениями датчика 1, оператор наблюдает на экране телемонитора 44 изображение физического
объекта и прицельную метку 45 (фиг.2).
Для измерения и считывания координат оператор совмещает изображение рабочей точки 45 на экране монитора 44 с изображением точки начального положения (отсчета),
0 за которую принимают, например, точку А (фиг,2), помещенную заранее на физическом объекте прицельной меткой 54. Эта процедура осуществляется подачей сигналов управления на суммирующие и вычита5 ющие входы реверсивных счетчиков 3 и 4, выходные коды которых поступают как на входы координат положения прицельной метки на телемониторе 44, так и через ЦАП 5 и 6 на выходы 40 и 41 (соответствующие
0 сигналы используются для управления перемещениями платформ). При достижении совмещения прицельной метки и изображения рабочей точки на вход 30 подается сигнал фиксации измерения, который про5 ходит через открытый по одному входу триггером 7 элемент 8 и поступает на входы элементов И первой и второй групп, переписывая коды с выходов реверсивных счетчиков 3 и 4 через элементы И на входы
0 регистра 21, куда они и заносятся синхросигналом с выхода элемента И 8, поступающим на синхронизирующий вход регистра 21, После занесения координат первой опорной точки в регистр 21 тем же синх5 роимпульсом, задержанным элементом 26 задержки на время переходных процессов в регистре 21 и поступающим на вход записи блока 18 памяти, осуществляется запись координат первой опорной точки по адресу,
0 сформированному сумматором 16. После записи кодов координат в блок 18 памяти импульс записи, задержанный на время записи элементом 27 задержки, сбрасывает регистр 21 в исходное состояние и поступа5 ет на счетчик 15, фиксируя в нем единицу и подготавливая очередной адрес для записи координат следующей опорной точки,
На поверхности физического объекта намечают опорные точки, например, В, С, D
0 (фиг,2). Эти точки намечаются либо визуально, например, по линиям разъемов конструкций, либо путем нанесения меток красителем и т.п. Подачей управляющих сигналов смещают рабочую точку 54 (фиг.2)
5 до совмещения на экране телемонитора 44 изображения измеряемой опорной точки с прицельной меткой 45, после чего вновь формируется сигнал фиксации, поступающий на вход 30 и считывающий код реверсивных счетчиков 3 и 4, соответствующий
новому положению прицельной метки,в регистр 21 и далее в блок 18 памяти.
Таким образом, в блоке 18 памяти последовательно оказываются записанными координаты опорных точек физического объекта, которые однозначно определяют геометрию физического объекта.
Как только счетчик 15 фиксирует заданное число опорных точек, компаратор 17 сравнивает код, зафиксированный в регист- ре 22, с кодом счетчика 15 и вырабатывает сигнал, который проходит через элемент И 9 на выход 39, сигнализируя о том, что считывание координат данного физического объ- екта закончено и можно приступать к считыванию координат очередного физического объекта, задавая идентификатор этого объекта и число опорных точек.
Введение ряда новых элементов и свя- зей позволяет существенно сократить объем памяти блока памяти (ОЗУ) при фиксации всего необходимого объема информации от объекта, что и определит существенное повышение быстродействия устройства при решении задачи получения графических изображений (чертежей трубопроводов, строительных конструкций, токопроводов и т.п.) с материального объекта
Формулаизобретения
Устройство для считывания координат точек объектов, содержащее телевизионный датчик, блок видеоконтроля, сигнальный и синхронизирующий входы которого подключены соответственно к сигнальному и синхронизирующему выходам телевизионного датчика, триггер, счетчик, первый элемент И, первый вход которого является первым управляющим входом устройства, а второй вход первого элемента И соединен с прямым входом триггера, первый и второй цифроаналоговые преобразователи, первую и вторую группы элементов И и компаратор, отличающееся тем, что,с целью повышения быстродействия устройства за счет избирательной селекции точек считывания, в него введены первый и второй реверсивные счетчики, второй элемент И, первый и второй элементы ИЛИ, первый, второй и третий регистры, дешифратор, сумматор, первый и второй блоки памяти, первый, второй, третий и четвертый элементы задержки и третья группа элементов И, суммирующий и вычитающий входы первого реверсивного счетчика являются соответ- ственно вторым и третьим управляющими входами устройства, суммирующий и вычитающий входы второго реверсивного счетчика - четвертым и пятым управляющими входами устройства, выходы первого и второго реверсивных счетчиков подключены
соответственно к входам первого и второго цифроаналоговых преобразователей, выходы которых являются соответственно первым и вторым управляющими выходами устройства, а также к первым входам элементов И первой и второй групп и первому и второму управляющим входам блока видеоконтроля, выход первого элемента И подключен к вторым входам элементов И первой и второй групп, синхронизирующему входу первого регистра и входу первого элемента задержки, выход которого соединен с входом второго элемента задержки и входом записи первого блока памяти, выход которого является информационным выходом устройства, выход второго элемента за- держки подключен к счетному входу счетчика, выход которого соединен с первыми входами сумматора и компаратора, и к установочному входу первого регистра, информационные входы которого соединены с выходами элементов И первой и второй групп, а выход первого регистра подключен к информационному входу первого блока памяти, адресный вход которого соединен с выходом сумматора, информационный вход второго регистра является информационным входом устройства, синхронизирующий вход второго регистра соединен с входом третьего элемента задержки и единичным входом триггера и является шестым управляющим входом устройства, выходы второго регистра подключены соответственно к входу дешифратора, выходы которого соединены соответственно с первыми входами элементов И третьей группы, и к второму входу компаратора, выход которого подключен к первому входу второго элемента И, второй вход которого соединен с прямым выходом триггера, а выход второго элемента И соединен с первым входом первого элемента ИЛИ и образует третий управляющий выход устройства, выход третьего элемента задержки соединен с вторыми входами элементов И третьей группы, выходы которых подключены соответственно к входам второго блока памяти, выход которого соединен с информационным входом третьего регистра, к входам второго элемента ИЛИ, выход которого подключен к входу четвертого элемента задержки, синхронизирующий вход и информационный выход третьего регистра соединены соответственно с выходом четвертого элемента задержки и с вторым входом сумматора, выход первого элемента ИЛИ, второй вход которого является седьмым управляющим входом устройства, подключен к установочным входам счетчика, второго и третьего регистров первого и второго реверсивных счетчиков
t
32 o
33
14
4
30 o7
5
ь
ift
i-
18
37
35o
22
20
s
jr- sffllh
25
J6o
Уст.0
Фиг1
W
o
6
ift
26
dh
ррт
w
Ю
18
38
In
77
/5
39
23
2
24
П
а&&яе% «& «lflЈ« c/
I1-
50
Яалет
&иг.2
| Патент США № 3707598, кл Н 04 N 7/18, опублик.1972. |
