Известные механизмы, применяющиеся в самоустанавливающихся опорах и зажимных приспособлениях, которые после подхода к изделию останавливаются и закрепляются, представляют собой сочетание системы двух прямолинейных движений с клином, из которых одно движение является движением подвода опоры, второе - движением клина, заклинивающее опору. Как правило, эти движения взаимно-перпендикулярны и осуществляются от различных источников.
В пинолях задних бабок некоторых станков применяются механизмы, подающие пиноль и заклинивающие ее от одного источника движения при помощи системы клиньев и рычагов. Но все существующие конструкции имеют крупногабаритные или сложные конструкции, которые не всегда удается применять в мащиностроепии из-за их больших размеров (например, в приспособлениях для внутреннего разжима необработанных изнутри тонкостенных труб больщих диаметров при их механической обработке по наружному диаметру). Кроме того, эти механизмы, в случае их применения в автоматических станках, требуют определенного взаимодействия источников движения, что усложняет схему управления станком.
Соединение и крепление деталей механизма при помощи заклинивающих тел, помещенных в сепараторе (обойме) между внутренней конической поверхностью втулки и наружной конической поверхностью входящего в нее стержня, известно.
Отличительной особенностью предлагаемого механизма для подвода к изделию опорного или зал ;имного органа с последующим закрепле№ 122040- 2 -
нием его при помощи промежуточных заклинивающих тел указанного типа является применение воздействующих с обеих сторон на сепаратор этих тел двух соосных спиральных пружин, из которых одна упирается в поршень приводного пневматического цилиндра, а другая, более слабая, пружина взаимодействует с опорным или зажимным органом. Такое выполнение предлагаемого механизма обеспечивает самоустанавливаемость опорного или зажимного органа в зависимости от положения изделия.
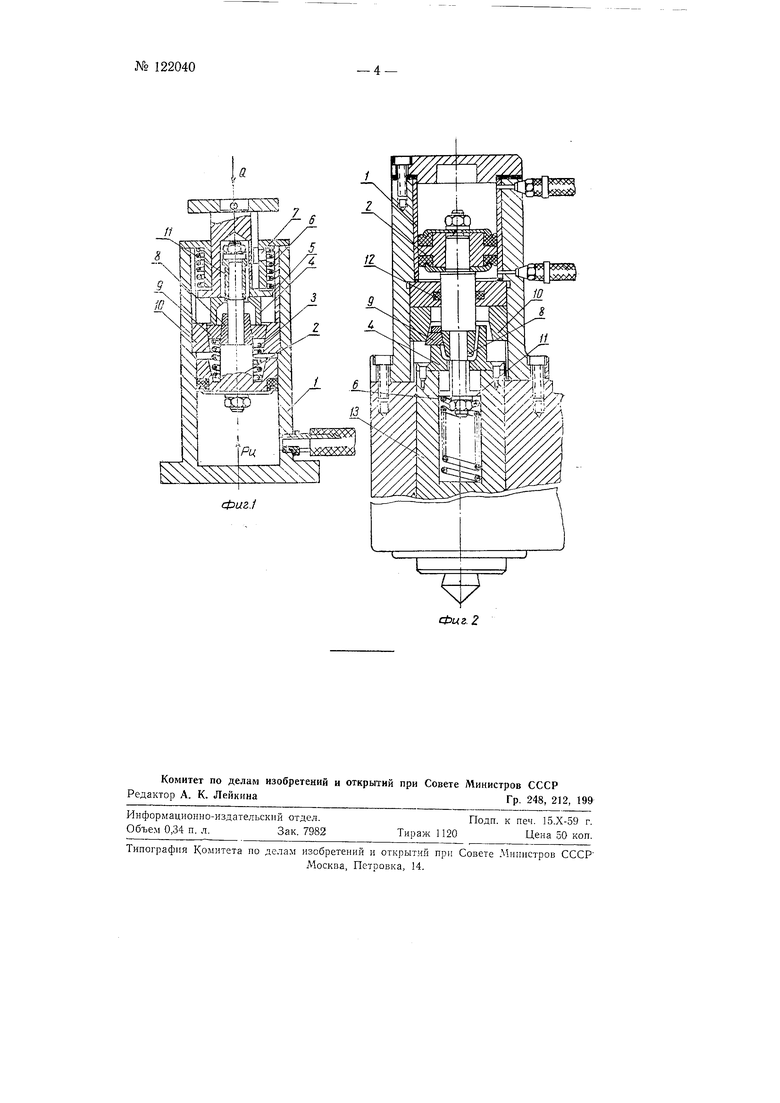
На фиг. I показан в осевом разрезе предлагаемый механизм, работающий от пневматического цилипдра одностороннего действия и примененный в самоустанавливающейся опоре; на фиг. 2 - тот же механизм, работающий от пневматического цилиндра двухстороннего действия и примененный в задней бабке токарного станка.
Сжатый воздух, поступая в цилиндр 1, нажимает на норшень 2. Поршень передает свое усилие через пружину 3 сепаратору 4, который нажимает па щток 5, а последний, выдвигаясь, сжимает более слабую пружину 6 и упирается в изде/тие. Шток удерживается от проворота шпонкой 7.
Когда шток упрется в изделие и прекратит свое выдвижение, под действием сил поршня начнет сжилчаться прзжина 3. При этом конический стержень 8 входит в сепаратор 4 и распирает заклинивающие тела, в данном случае сухари 9, до упора их во внутреннюю коническую поверхность втулки 10.
Усилие от поршня 2, передаваемое штоку 5, равняется:
где: Q - усилие, возникающее па штоке;
сила давления поршня;
Р - усилие пружипы 6 при сжатии ее до момента расчета;
Т-сила, зависящая от сил трения в механизме.
Пружина 3 должна быть сильнее пружины 6 примерно в два раза, а сила Рц больше силы пружины 3.
Если изделие сместится по отношению « опоре, то опора немедленно последует за ним, так как сила Р, действует постоянно.
При увеличении нагрузки на шток 5 опоры вся система заклинивается, так как в механизме возникают силы трения, передающие все Зсилие от штока на массу корпуса опоры.
Выпуск сжатого воздуха из цилиндра освобождает поршень 2 изпод нагрузки. Пружина 3, разжимаясь, толкает поршень в исходное положение. Шток, сидящий в отверстии конического стержня 8 с ходовой посадкой, проскальзывает на длину I, набирает живую силу и ударом втулки Л выбивает конический стержень 8 из заклиненного положения. Втулка 11 своими буртиками, упираясь в сепаратор 4, ограничивает разжим пружины 3.
Пружина 6, получив свободу (так как система расклинилась), разжимается и отводит щток, а с ним и сепаратор с поршнем в исходное положение.
Форма выполнения предлагаемого механизма, работающего от пневматического цилиндра двухстороннего действия и (примененного, например, в задней бабке токарного станка), дает возможность исключить из него одну из пружин.
Сжатый воздух, поступая в цилиндр / (полость А), нажимает на порщень 2. Поршень передает усилие через шток 12 и пружину 6 на пиноль 13 задней бабки.
Пиноль выдвигается до упора в изделие и останавливается. Пружина 6 сжимается, конический стержень 8 входит в сепаратор 4 и распирает сухари У до упора их в коническую поверхность втулки 10.
Q.p,Pi-7;
Усилие от поршня, передаваемое штоку, равняется:
где: Q - усилие, возникаюш;ее на пиноле; Р ц-сила давления норшня;
Т-сила, зависящая от сил трения в механизме.
Переключение крана сжатого воздуха на полость Б заставляет поршень 2 совместно с пружиной 6 тянуть шток 12 в обратном направлении, при этом шток 12 некоторое время проскальзывает в коническом стержне 8, где имеется ходовая посадка, набирает живую силу на длине / и ударом втулки // выбивает стержень 8 из заклиненного положения.
Втулка 11 двигаясь далее, захватывает своими буртиками сепаратор 4 и тянет через него пиноль в исходное положение.
Предмет изобретения
1.Механизм для подвода к изделию опорного или зажимного органа с последующим его закреплением при помоши заклиниваюи,их тел, помещенных в сепараторе (обой-ме) между внутренней конической поверхностью втулки и наружной конической поверхностью входящего в нее стержня, отличающийся тем, что, с целью обеспечения самоустанавливаемости опорного или зажимного органа в зависимости от положения изделия, применены воздействующие на сепаратор заклинивающих тел с обеих его сторон соосиые винтовые пружины, из которых одна упирается в порщень приводного пневматического цилиндра, а другая, более слабая, пружина взаимодействует с опорным или зажимным органом.
2.Форма выполнения механизма по п. 1, отличающаяся тем, что, с целью исключения из него одной из пружин, применен пневматический цилиндр двухстороннего действия.
- 3-№ 122040
,-T,

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный привод | 1987 |
|
SU1484461A1 |
| ПНЕВМАТИЧЕСКИЙ МНОГОДОЗОВЫЙ БЕЗЫГОЛЬНЫЙ ИНЪЕКТОР | 2003 |
|
RU2241413C1 |
| Подъемник скользящей опалубки (его варианты) | 1982 |
|
SU1106885A1 |
| Гидравлический подъемник скользящей опалубки | 1981 |
|
SU968264A1 |
| Подающе-тянущий механизм непрерывного волочильного стана | 1984 |
|
SU1286311A1 |
| Гидравлический подъемник скользящей опалубки | 1981 |
|
SU1011835A1 |
| Способ прокатки колец шарикоподшипников и устройство для его осуществления | 1980 |
|
SU967636A1 |
| Гидравлический домкрат с ограничителем высоты подъема скользящей опалубки | 1979 |
|
SU919982A1 |
| Устройство для быстрого крепления колеса на балансировочном станке | 2021 |
|
RU2766067C1 |
| УСТРОЙСТВО ДЛЯ ВЫКЛЮЧЕНИЯ ДВИЖУЩЕГО МЕХАНИЗМА ПАРОВОЗНОЙ МАШИНЫ ПРИ ЕЗДЕ ПАРОВОЗА БЕЗ ПАРА | 1934 |
|
SU45941A1 |