Изобретение относится к медицине, а именно к протезированию.
Известно устройство для управления биоэлектрическими протезами, содержащее блок выделения управляющего сигнала, преобразователь, переключак щий узел и блок исполнительных механизмов 1.
Однако это устройство не обеспечивает необходимого количества выполняемых протезом функций, что требуется при высоких ампутациях верхних конечностей.
Цель изобретения - увеличениеколичества выполняемых протезом функций.
, Цель достигается тем, что в устройство,содержащее блок выделения управляющих сигналов, преобразователь, переключающий узел и блок исполнительных механизмов, введена схема выборки, выход которой через блок коммутации связан с блоком исполнительных механизмов и преобразователем, а вход - с переключающим узлом, при этом схема выборки содержит последовательно соединенные счетчик, дешифратор и блок счетных триггеров. .
При этом переключающий узел состоит из двух формирователей, схемы ИЛИ, первой и второй схем И, двух инверторов, триггера и КС-цепочки. Выходы формирователей соединены со схемой ИЛИ и первой схемой И, выход которой через инвертор подключен к триггеру и второй схеме И, выход которой через другой инвертор связан с триггером и RC-цепочкой.
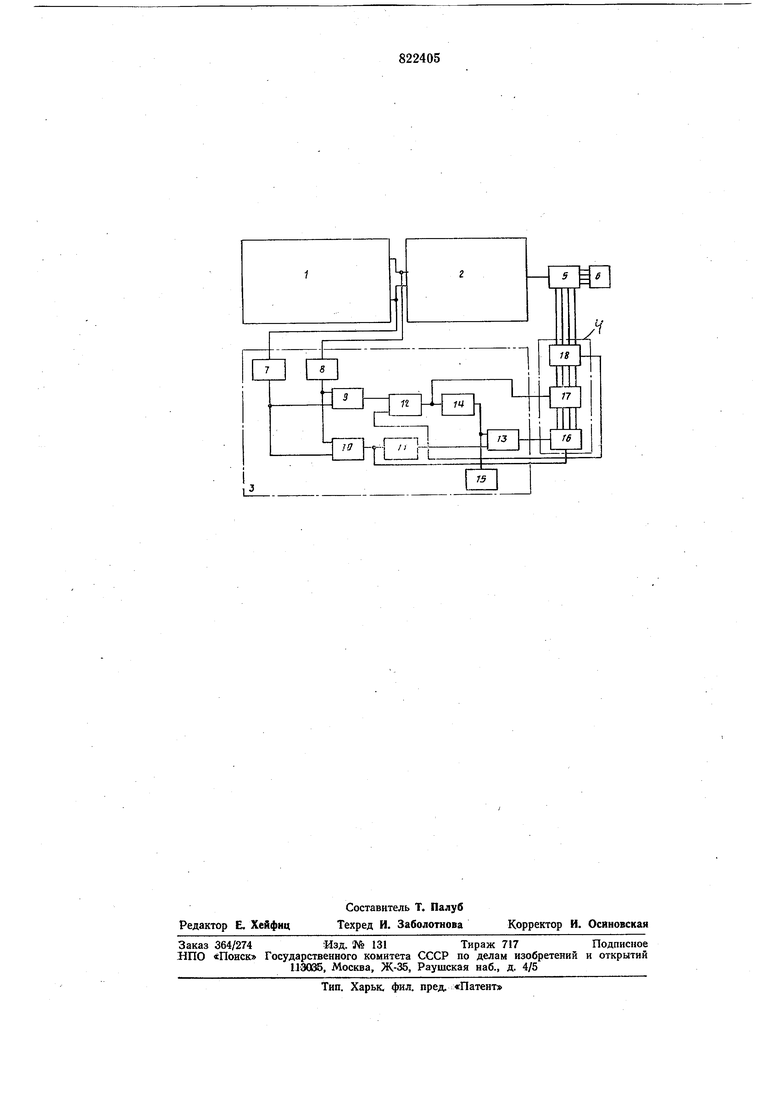
На чертеже приведена функциональная схема устройства для управления биоэлект-. рическим протезом.
Устройство содержит блок 1 выделения управляющих сигналов, соединенный с пре образователем 2 и переключающим узлом
3. Переключающий узел через схему 4 выборки, а также преобразователь 2 подключены к блоку 5 коммутаций, выходы которого соединены с блоком 6. исполнительных механизмов. ПереключаЮ1ций узел 3 содержит формирователи 7, 8 импулксов, соответственно соединенные с логическими схемами ИЛИ 9 и И 10. Выход схемы И 10 через инвертор 11 подключен к схеме И 12 и к триггеру 13, а выход схемы ИЛИ 9 подключен к схеме И 12, выход которой через инвертор 14 соединен со входом триггера 13 и с RC-цепочкой 15. Схема выборки содержит счетчик 16, выходы которого через дещифратор 17 подключены к блоку 18
счетных триггеров, выходы последних соединены с (блоком коммутации 5. Внход схемы И 10 соединен со счетным входом, а выход триггера 13 - со сбросовым входом счетчика 16. Кроме того, выход схемы И 12
подключен к разрешающему входу дешифратора 17, а выход инвертора И - к разрешающему входу блока 18 счетных триггеров.
Устройство работает следующим образом.
При включении источника питания с помощью сигнала с RC-цепочки 15 триггер 13 и счетчик 16 устанавливаются в нулевое положение.
Биоэлектрический сигнал, полученный при одновременном сокращении двух мышц, передается через блок 1 выделения управляющих сигналов в формирователи 7, 8, с выходов которых в виде прямоугольных импульсов сигнал поступает на схемы ИЛИ 9 и И 10. С выхода схемы И 10 через инвертор 11, а также со схемы И 9 импульсы противоположной полярности поступают на схему И 12, через которую сигнал на разрешающий вход дешифратора 17 не передается. Триггер 13 по отрицательному импульсу с инвертора 11 устанавливается в единичное, а блок счетных триггеров 16 - в нулевое состояние. Сигналы с выхода триггера 13 передаются на разрешающий вход, а со схемы И 10 - на счетный вход счетчика 16, в результате чего, в зависимости от количества одновременных сокращений управляющих мышщ, счетчик устанавливается в определенное положение.
При поочередном сокращении мышц биоэлектрический сигнал проходит через формирователь 7 или 8, затем через схемы ИЛИ 9 и инвертор 111 на вход схемы И 12, с выхода которой сигнал поступает на разрешающий вход де1ШИ|фратора 17, а через инвертор 14 - на пулевой вход триггера 33. В результате этого информация, накопленная в счетчике 16, через дешифратор 17 передается в блок 18 счетных триггеров. С выхода одного из триггеров блока 18, выбранного в соответствии с количеством импульсов, поступивщих со счетчика 16, сигнал передается в коммутирующий блок 5, который подключает один из исполнительяых механизмов 6 к преобразователю 2. Кроме того, на вход преобразователя 2 с лока 1 выделения управляющего сигнала передается биоэлектрический сигнал от поочередного сокращения мышц, который управляет выбранным движением протеза.
Таким образом, изобретение позволяет с помощью двух управляющих мышц peaлизовать необходимое -количество движений протеза, кроме того, устройство отличается простотой управления многофункциональным протезом и позволяет реализовать пропорциональное управление исполнительными механизмами.
Формула изобретения
1. Устройство для управления биоэлектрическими протезами, включающее блок выделения управляющего сигнала, преобразователь, переключающий узел и блок исполнительных механизмов, отличающееся тем, что, с щелью увеличения количества выполняемых протезом функций, в устройство введена схема выборки, выход которой через блок коммутации связан с блоком исполнительных механизмов и
преобразователем, а вход - с переключающим узлом, при этом схема выборки содержит последовательно соединенные счетчик, дешифратор и -блок счетных триггеров.
2. Устройство по п. 2, отличающеес я тем, что переключающий узел состоит из двух формирователей, схемы ИЛИ, первой и второй схем И, двух инвертеров, триггера и RC-цепочки, при этом выходы формирователей соединены со схемой ИЛИ и первой схемой И, выход которой через один инвертор подключен к триггеру и второй схеме И, выход которой через другой инвертор связан с триггером и RC-цепочкой.
Источник информации, принятый во внимание при экспертизе:
1. Лившиц М. М. и др. Использование цифровых интегральных микросхем в биоэлектрических системах пропорционального управления многофункциональными протезами. Об. тр. .Протезирование и протезостроение, вып. 45, М., ЦНИИПП, 1978, с. 52-6Ь
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| Устройство для цифрового управления тиристорным регулятором | 1990 |
|
SU1744774A1 |
| Устройство для программного управления | 1987 |
|
SU1418652A1 |
| Устройство для ввода информации | 1983 |
|
SU1239706A1 |
| Устройство для управления биоэлектрическим протезом | 1980 |
|
SU971310A1 |
| Цифровое устройство измерения параметров гармонических сигналов | 1984 |
|
SU1182425A1 |
| Формирователь импульсов селективного возбуждения ядерного магнитного резонанса | 1987 |
|
SU1516921A1 |