Изобретение относится к подъемно- транспортному машиностроению, в частности к криволинейной направляющей тележечных конвейеров переменной высоты и является усовершенствованием устройства, описанного по авт.св. № 598833.
Цель изобретения - снижение шума и уменьшение износа роликов тележек путем обеспечения плавности сопряже- ния поверхностей смежных пластин направляющей. .
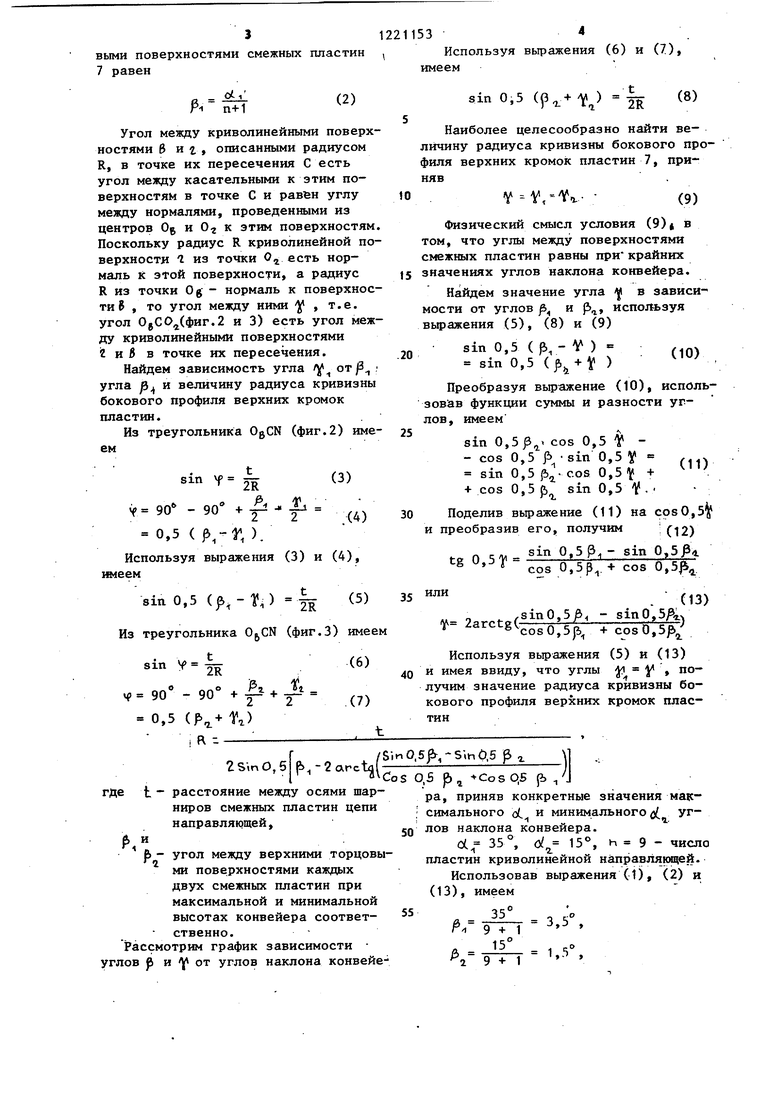
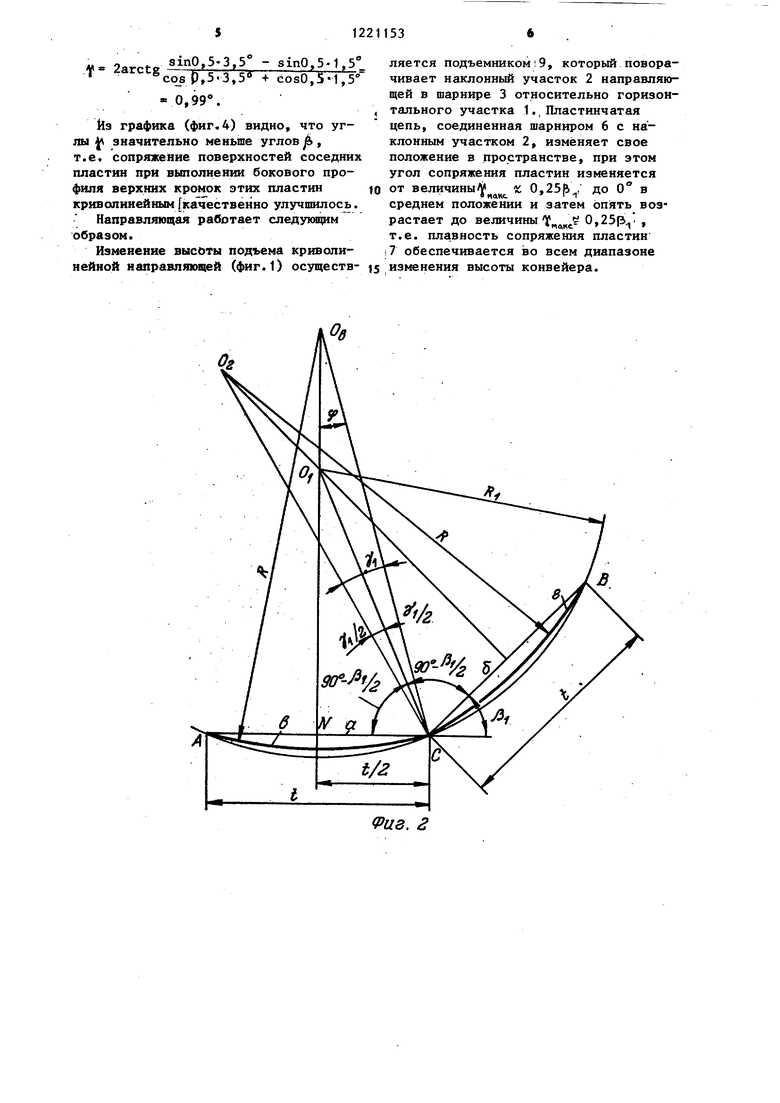
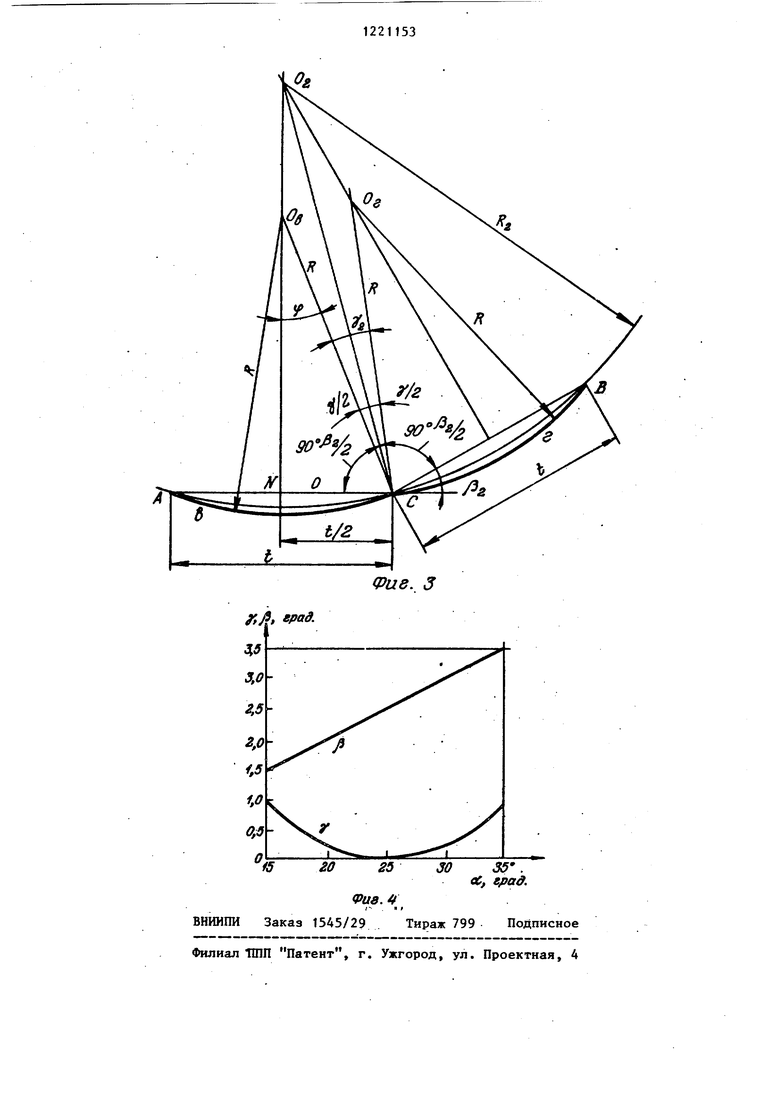
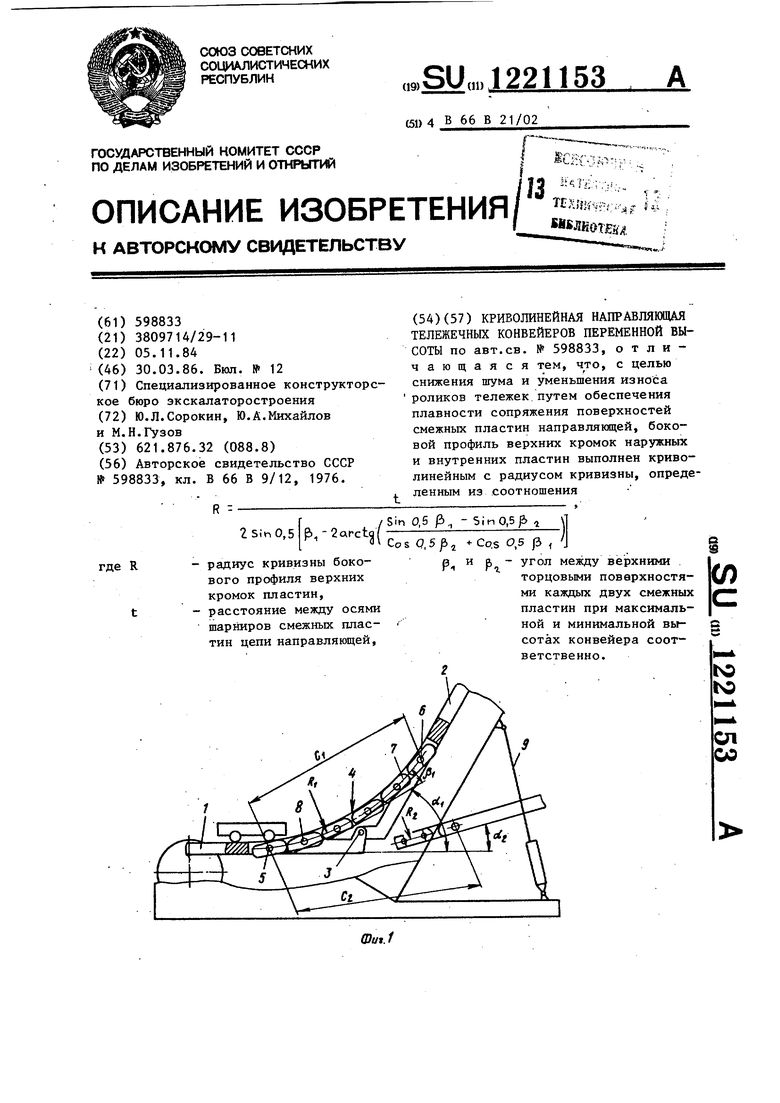
На фиг. 1 схематично изображена конструкция направляющей; на фиг. 2 - две смежных пластины направ ляющей при максимальном угле наклона конвейера (точки А, В и С являются осями шарниров направляющей)} на фиг. 3 - то же, при минимальном угле наклона конвейера, на фиг. 4 - гра- фик зависимости углов между поверхностями смежных пластин от. углов наклона конвейера при выполнении бокового профиля верхних кромок пластин прямолинейным и криволиней- ным.
криволинейная направляющая конвейера с переменной высотой подъема состоит из прямолинейного горизонтального 1 и наклонного 2 участков, связанных между собой шарниром 3 и сочлененных криволинейным участком 4 с помощью шарниров 5 и 6. Криволинейный участок 4 вьтолнен в виде платинчатой цепи, пластины 7 которой соединены осями 8 и снабжены зубьями (не показаны), сцепляющимися между собой. Наклонный участок 2 поддерживается подъемником 9. Криволинейный участок 4, выполненный в виде пластинчатой цепи, при повороте одной пластины которой относительно соседней на некоторый угол все пластины оказываются повернутыми на тот же угол относительно рядом расположенных. Цепь имеет форму части периметра правильного многоугольника, вписанного в окружность радиуса R при максимальном угле oL-i наклона конвейера. Величина радиуса R зависит от расстояния С,, между шарнира,ми 5 и 6. При изменении угла наклона конвейера до минимального ot расстояние между шарнирами изменяется и равно С. Цепь сохраняет форму части периметра правильного многоугольника, но впи- санного в окружность радиуса R. Боковой профиль верхних кромок наружны и внутренних пластин 7 выполнен кри
5 0
0
волинейным, радиус R кривизны которого выбран из соотношения, зависящего от шага криволинейной зубчато-цепной направляющей и от величины углов между поверхностями соседних пластин при максимальном угле наклона конвейера и минимальном угле наклона.
Для выбора соотношения радиуса R кривизны бокового профиля верхних кромок пластин 7 рассмот эим фиг. 2 и 3. на которых приняты обозначения: t - шаг криволинейной зубчато-цепной направляющей, R - радиус кривизны бокового профиля верхних кромок пластин 7, а и б - поверхности соседних пластин 7 при выполнении бокового профиля верхних кромок пластин прямолинейным, в и г - поверхности со- седних пластин 7 при выполнении бокового профиля верхних их кромок криволинейным, R и R 5 - радиусы кривизны криволинейной направляющей при максимальном oi и минимальном d. углах наклона конвейера, соответственно; О., и О, центры окружностей криволинейной направляющей при максимальном oi и минимальном о(. углах наклона конвейера, соответственно, 05 - центр окружности криволинейной поверхности 6, центр окружности криволинейной поверхности г, /i и f) - углы между поверхностями смежных пластин при максимальном cf., и минимальном ai углах наклона конвейера, соответственно (в случае вьтол- нения бокового профиля верхних кромок пластин криволинейным) у и V углы между нормалями проведенными из центров Og и GI к касательным криволинейных поверхностей 6 иг, проходящим через точку пересечения этих поверхностей (точка С), Ч - угол между нормалью, проведенной из центра Og к касательной криволинейной поверхности 6, проходящей через точку С, и перпендикулярном, восстановленным из центра Og к поверхнос
ТИ Q .
При минимальном угле наклона конвейера угол между поверхностями смежных пластин равен
Э.
п+1
(1)
где п - число пластин криволинейной направляющей.
При максимальном угле наклона конвейера угол между верхними торцр
выми поверхностями смежных пластин 7 равен
,. -
РЧ П4-1
(2)
Угол между криволинейными поверхностями 6 и 2. , описанными радиусом R, в точке их пересечения С есть угол между касательными к этим поверхностям в точке С и равен углу между нормалями, проведенными из центров Og и 0 к этим поверхностям. Поскольку радиус R криволинейной поверхности 1 из точки 0 есть нормаль к этой поверхности, а радиус R из точки О g - нормаль к поверхности 8 , то угол между ними , т.е. угол 00СО(фиг.2 и 3) есть угол между криволинейными поверхностями г и в в точке их пересечения.
Найдем зависимость угла /)| от /3 угла р и величину радиуса кривизны бокового профиля верхних кромок пластин.
Из треугольника OgCN (фиг.2) имеем
sin
2R
2 2
f 90 - 90
0,5 ( -Г, ). Используя выражения (3) и
Ш4еем
sin 0,5 (,-Y,)
sin
у 2R
треугольника (фиг.З) имеем
(6)
Ь Ji (7) 0.5 ()
., R --:-.-L
90 - 90°
12211534
, Используя выражения (6) и (7), имеем
sin 0,5 ( ) 2ь
(8)
Наиболее целесообразно найти ве- личину радиуса кривизны бокового профиля верхних кромок пластин 7, приняв
Y-V,- Vo. (9)
Физический смысл условия (9)« в том, что углы между поверхностями смежных пластин равны при крайних значениях углов наклона конвейера.
Найдем значение угла в зависимости от углов и Р), ИСПО1М)ЗуЯ
вьфажения (5), (8) и (9)
sin 0,5 ( , - V ) sin 0,5 ( ji, +Y )
Преобразуя выражение (10), исполь- функции суммы и разности углов, имеем
(10)
sin 0, cos 0,5 Y - - cos 0,5 Jb sin 0,5 У sin 0,5 jb cos 0,5Y + + cos 0,5 p, sin 0,5 Y.
(11)
30
tg 0,5)
35
40
Поделив вьфажение (11) на cosO,5 и преобразив его, получимCl2)
sin 0,5 fi - sin 0,5pa cos 0,5p. + cos 0,5
. (13)
M 3arcte(Q ) Т ,5 + cpsQ,5f
Используя выражения (5) и (13) и имея ввиду, что углы У получим значение радиуса кривизны бокового профиля верхних кромок пластин
где
9С1- п о .5, Sm0.5p., .
:S(nO,b & -2arctal 1
I Cos 0,S fo, -CosqS ft /J
t расстояние между осями шарниров смежных пластин цепи направляющей.
Р CosqS (Ь ра, приняв конкретные з ; симального oL и минимал 50 лов наклона конвейера.
.
f - угол между верхними торцовыми поверхностями каждых двух смежных пластин при максимальной и минимальной высотах конвейера соответственно.
Рассмотрим график зависимости углов р и Y от углов наклона конвейе 1
s 0,S fo, -CosqS ft /J
Р CosqS (Ь ра, приняв конкретные значения мак- ; симального oL и минимального уг- 50 лов наклона конвейера.
Ot 35°, d 15°, h 9 - числ пластин криволинейной налравлякмцей. Использовав выражения (1), (2) и (13), имеем
о
3,5% 1.5%
55
ч.- ,5° - sin0.51.5°
gcosOls.ais 0030:5.1:5°
«0,99°.
.
ЙЗ графика (фиг,4) видно, что углы значительно меньше углов , т.е. сопряжение поверхностей соседних пластин при вьтолнении бокового профиля верхних кроток этих пластин криволинейным качественно улучшилось.
Направляющая работает следукяцим образом.
Изменение высоты подъема криволинейной направляющей (фиг.1) осуществ-
ляется подъемником 9, который поворачивает наклонный участок 2 направляющей в шарнире 3 относительно горизонтального участка 1., Пластинчатая цепь, соединенная шарниром 6 с наклонным участком 2, изменяет свое положение в пространстве, при этом угол сопряжения пластин изменяется от величины/i у, 0,25, до О в среднем положении и затем опять воз растает до величины У 0, , т.е. плавность сопряжения пластин i 7 обеспечивается ieo всем диапазоне изменения высоты конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепная передача | 1986 |
|
SU1567828A1 |
| Зубчатая передача | 1984 |
|
SU1240977A1 |
| Цепная передача | 1987 |
|
SU1663274A1 |
| Способ непрерывного литья плоских слитков | 1989 |
|
SU1715475A1 |
| Стенд для градуировки и определения жесткости ротационных динамометров и тензометрических валов | 1989 |
|
SU1749737A2 |
| УСТРОЙСТВО ДЛЯ ЧИСТОВОЙ И УПРОЧНЯЮЩЕЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ТЕЛ ВРАЩЕНИЯ СЛОЖНОГО ПРОФИЛЯ | 2010 |
|
RU2493954C2 |
| Способ контроля прозрачных оптических деталей | 1990 |
|
SU1800261A1 |
| Нижний ролик устройства для профилирования ободьев канатных блоков | 1990 |
|
SU1804361A3 |
| Цепная передача | 1990 |
|
SU1728556A1 |
| Приводная цепь | 1975 |
|
SU635896A3 |
2
из. г
Pa
Фие. 3
го 25 30 35.
ас, крад,
PU8.
15
ВНИИПИ Заказ 1545/29 Тираж 799 Подписное Филиал ТШП Патент, г. Ужгород, ул. Проектная, 4
| Криволонейная направляющая для тележечных конвейеров переменной высоты | 1976 |
|
SU598833A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
