величину, равную
S ср Sj
и
-
M-il
К
соответственно
где 8дд - значение новых ординат для ближайших слева и справа ведущих секций; К - число ведомых секций между соседними ведущими секциями, если новые ординаты для левой или правой секций больше среднего значения Sf , то их уменьшают на эти же
Изобретение относится к горной промышленности, а именно к способам автоматического управления в профиле пласта угледобывающими струговыми комплексами и агрегатами фронтального действия.
Целью изобретения является повышение надежности процесса автоматического управления в профиле пласта за счет обеспечения безаварийных условий работы комплекса путем ограничения углов изгиба между соседними секциями крепи.
Фиксируют траектории по длине лавы многочленом Лагранжа .(Ы-1)-й сте- пени или интегральным уравнением прогибов упругой балки.
Обращение к одному из двух вариантов выбора траектории определяется типом связей секций крепи комплекса.
Б случае, если упругие элементы связи между секциями крепи отсутствуют и возможен их изгиб в произвольном направлении в пределах допустимого значения углов изгиба , расчет ординат оснований секций производится с помощью полинома Лагран- жа ,
h(xi |;hjn..
j«1 J i4j X,
где h(x) - ордината секции крепи с
абсциссой х; - ордината j -и ведущей секJ
ции крепи.
величины, вновь определяют значения углов изгиба секций крепи,сравнивают их со значением допустимого угла из- .гиба, повторяют указанные операции до тек пор, пока все углы изгиба секций не станут меньшими или равными допустимому значению, по скорректи- )ованным новым ординатам задают новую конечную траекторию укладки секции крепи и выдают управляющие сигналы для перемещения гидродомкратов ведущих и ведомых секций на величины равные разности новых конечных и исходных ординат Соответствующих секций.
В случае, если замковые соединения секций крепи дополнены упругими элементами типа рессоры, что исключа- ет произвольное направление углов изгиба соседних секций крепи одна относительно другой и однозначно определяет сами значения этих углов изгиба, расчет ординат оснований секций крепи производится с помощью интегрального
уравнения прогибов балки:
,E34xS E3 rPj x-b-(j-.)e;||,
О
(2)
где h - ордината в точке х;
h - ордината начальной точки; дд - угол поворота сечения в начальной точке;
ЕЗ - жесткость упругого соедине- ния;
PJ - силы, воздействующие на основания ведущих секций крепи; b - расстояние от отсчета до первой ведущей секции крепи; д - шаг расстановки датчиков порода-- уголь (расстояние между ведущими секциями крепи). Использование метода начальных параметров для решения уравнения (2) позволяет построить систему N уравнег НИИ, при решении которой рассчитываются в общем случае неизвестные от35
ношения и далее находятся и фиксируются значения координат всех сек-
ций крепи. Таким образом, по полиному Лагранжа (N-l)-ft степени или интегральному уравнению прогибов упругой балки определяют исходные координаты всех ведомых секций крепи.
Зная величины необходимых перемещений исполнительных гидродомкратов ведупшх секций крепи, суммируют их с соответствующими ординатами оснований ведущих секций крепи и по полученным N суммам определяют и фиксируют конечную траекторию укладки секций крепи в виде многочлена Лангран- жа (Ы-1)-й степени или интегрального уравнения прогибов упругой балки.По конечным координатам секций крепи определяют и фиксируют углы изгиба между всеми соседними секциями крепи, которые соответствуют дополнительным углам между хордами, соединяющими найденные точки координат.
Затем сравнивают полученные значения oi, со значением допустимого угла
равную номеру ближайшей
изгиба оСдип , и если все найденные доп то выдакуг управляющие сигналы на исполнительные органы, перемещающие направляющие ведомых и ведущих секций крепи на величины, равные разности конечных и исходных ординат соответствующих секций крепи. В противном случае, если облар живается « осуществляют корекцию двух соответствующих сумм. С этой целью по значению i определяют номера ближайших к месту возможного аварийного изгиба, слева и справа о дего, ведуц их секций крепи, для чег вьщеляют целую часть отношения
м гт-1
слева ведущей секции крепи. Число К. здесь соответствует количеству ведомых секций, размещаемых между каждой парой ведущих секций крепи. Номер ближайшей справа ведущей секции крепи соответственно равен М + 1.
На следующем этапе расчета определяют среднее значение полученных N сумм и производят коррекцию суммы соответствующей ближайшей слева или справа ведущей секций крепи.
Суть корректировки в изменении соответствующей суммы на величину AS, определяемую отношением разности Sjp и конкретного значения корректируемой суммы к , При этом,если суммы для левой или правой ведущих
секций крепи меньше S
Р
то их
10
35
Q
15
20
25
30
45
50
55
344
увеличивают на величину iS, если суммы, подлежащие коректировке, больше S , то их уменьшают на величину iS, затем вновь определяют значение углов изгиба секций of; и сравнивают их со значением . Процесс вычислений повторяют до тех пор, пока все углы не станут меньше либо равны Ыдоп . По скорректированным суммам определяют подлежащие реализации конечные значения ординат дпя всех секций крепи и величины управляющих воздействий на исполнительные гидродомкраты секций крепи комплекса как разность скорректированных конечных и Исходных ординат соответствующих секций крепи. После этого выдают команду, разрешающую отработку сформированных сигналов.
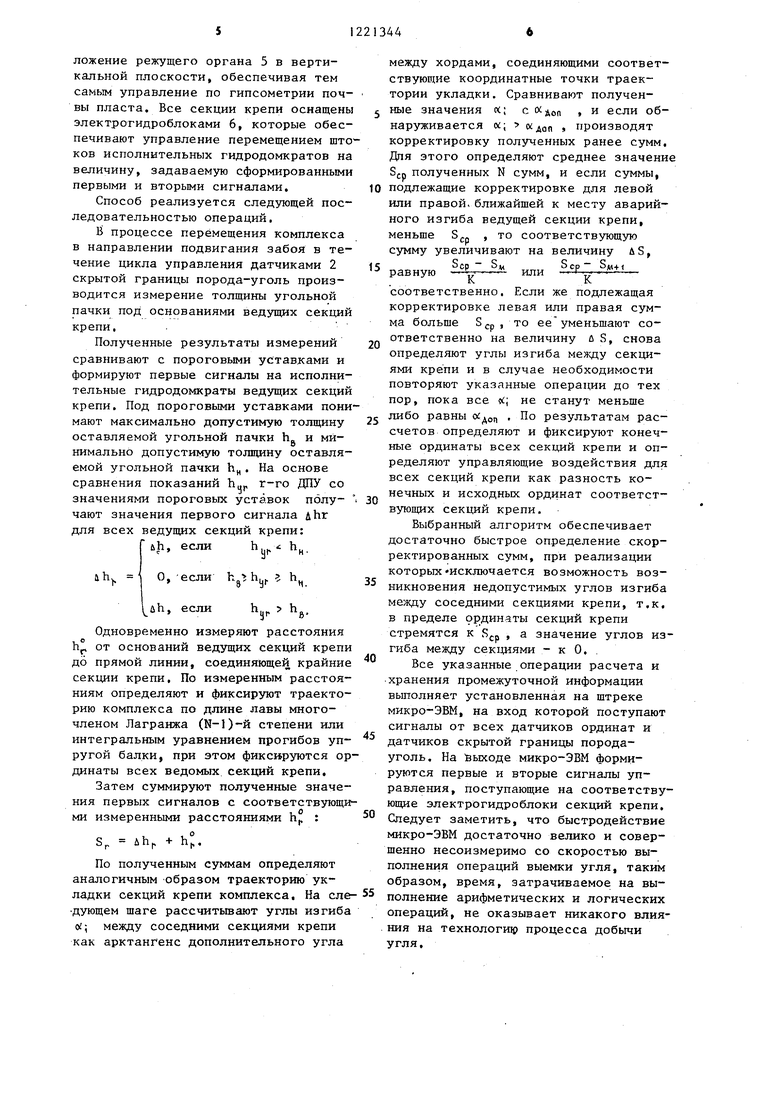
На фиг. 1 представлена схема про- ведения измерений для реализации способа автоматического управления угледобывающими струговыми комплексами и агрегатами в профиле пласта; на фиг. 2 - схема управления струговым комплексом в профиле пласта.
На фиг. 1 ВС1, ВС2, ..., BGN - ведущие секции крепи, причем они равноудалены друг от друга и оснащены датчиками ординат, позволяющими измерять расстояния h, h, h, ,., h° от оснований секций крепи до прямой линии, соединяющей крайние секции крепи, датчика1-ш скрытой границы порода- уголь ДПУ1, ДПУ2, ..., ДПУК, измеряющими среднюю толщину угольной пачки h|j, , Ьц2 ,. .., huf, под основаниями ведущих секций крепи в процессе ее перемещения в направлении подвигания забоя в течение всего цикла управления.
На фиг. 2 изображено, как на опорной стойке каждой ведущей секции крепи установлены датчики 1 ординат, обеспечивающие измерение расстояния от прямой линии отсчета до основания ведущей секции крепи, датчики 2 скрытой границы порода-уголь, позволяющие отслеживать скрытую границу порода-уголь и обеспечивающие измерение толщины угольной пачки над ним. Исполнительный гидродомкрат секции крепи 3 оснащен датчиками вьщвижки штока, позволяющими контролировать величину отработки.управляющего воздействия . Исполнительный гидродомкрат 3 связан шарнирно с направляющей 4 режущего органа 5. При отработке управляющих воздействий изменяется положение режущего органа 5 в вертикальной плоскости, обеспечивая тем самым управление по гипсометрии поч- вы пласта. Все секции крепи оснащены электрогидроблоками 6, которые обеспечивают управление перемещением штоков исполнительных гидродомкратов на величину, задаваемую сформированными первыми и вторыми сигналами,
Способ реализуется следующей последовательностью операций.
В процессе перемещения комплекса в направлении подвигания забоя в течение цикла управления датчиками 2 скрытой границы порода-уголь производится измерение толщины угольной пачки под основаниями ведущих секций крепи,
Полученные результаты измерений сравнивают с пороговыми уставками и формируют первые сигналы на исполнительные гидродомкраты ведущих секций крепи. Под пороговыми уставками понимают максимально допустимую толщину оставляемой угольной пачки hg и минимально допустимую толщину оставляемой угольной пачки h сравнения показаний h
Г
На основе г-го ДПУ со
значениями пороговых уставок получают значения первого сигнала дЬг для всех ведущих секций крепи:
лЬ,
если
h
Hh 1
О, -если h Ьц h
V
ч.
uh, если
Ut. 6-г-
Одновременно измеряют расстояния h от оснований ведущих секций крепи до прямой линии, соединяющей крайние секции крепи. По измеренным расстояниям определяют и фиксируют траекторию комплекса по длине лавы многочленом Лагранжа (Ы-1)-й степени или интегральным уравнением прогибов упругой балки, при этом фиксируются ординаты всех ведомых секций крепи.
Затем суммируют полученные значения первых сигналов с соответствующими измеренными расстояниями h,. :
S ДЬр + h°.
По полученным суммам определяют аналогичным образом траекторию укладки секций крепи комплекса. На еле- дующем шаге рассчитьгоают углы изгиба Х; между соседними секциями крепи как арктангенс дополнительного угла
ю
is
0 5
между хордами, соединяющими соответ- ствуюв1ие координатные точки траектории укладки. Сравнивают полученные значения «; с осдоп , и если обнаруживается oi; «дан , производят корректировку полученных ранее сумм. Для этого определяют среднее значение Sjp полученных N сумм, и если суммы, подлежащие корректировке для левой или правой,ближайшей к месту аварийного изгиба ведущей секции крепи, меньше , то соответствующую
0
5
5
5
сумму увеличивают на величину Л5, равную
Scg - 5ц ....,,
К - ™ К
соответственно. Если же подлежащая корректировке левая или правая сумма больше 8„ , то ее уменьшают соответственно на величину л S, снова определяют углы изгиба между секциями крепи и в случае необходимости повторяют указанные операции до тех пор, пока все не станут меньше либо равны «доп . По результатам рас- счетов определяют и фиксируют конечные ординаты всех секций крепи и определяют управляющие воздействия для всех секций крепи как разность конечных и исходных ординат соответствующих секций крепи.
Выбранный алгоритм обеспечивает достаточно быстрое определение скорректированных сумм, при реализации которых«исключается возможность возникновения недопустимых углов изгиба между соседними секциями крепи, т,к, в пределе ординаты секций крепи стремятся к S.P , а значение углов изгиба между сектдиями - к О, .
Все указанные операции расчета и хранения промежуточной информации выполняет установленная на штреке микро-ЭВМ, на вход которой поступают сигналы от всех датчиков ординат и датчиков скрытой границы порода- уголь. На быходе микро-ЭВМ формируются первые и вторые сигналы управления, поступающие на соответствующие электрогидроблоки секций крепи. Следует заметить, что быстродействие микро-ЭВМ достаточно велико и совершенно несоизмеримо со скоростью выполнения операций выемки угля, таким образом, время, затрачиваемое на выполнение арифметических и логических операций, не оказывает никакого влияния на технологи процесса добычи угля,
Линия от- cinema
-Ahi
fezz
///Z/Z//////7///////////.
Порода 7777777
Редактор М.Циткина
Составитель И.Назаркина
Техред Н.Бонкало Корректор А.Зимокосов
Заказ 1562/39 Тираж 470Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,-, д.4/5
Филиал ШШ Патент, г. Ужгород, ул.Проектная, 4
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Очистной агрегат | 1977 |
|
SU821703A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Способ разработки тонких крутых угольных пластов и комплекс для его осуществления | 1986 |
|
SU1490279A1 |
| Способ выемки полезного ископаемого горной машиной | 1983 |
|
SU1154460A1 |
| Очистной механизированный комплекс | 1983 |
|
SU1141202A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ВЫЕМОЧНЫХ КОМПЛЕКСОВ | 1971 |
|
SU306260A1 |
| Агрегат для добычи угля | 1977 |
|
SU714006A1 |
| Выемочный комплекс | 1987 |
|
SU1434123A1 |
| Струговая установка | 1968 |
|
SU523170A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1996 |
|
RU2119059C1 |
| Струговая выемка угля./Под общей ред.проф.А.Д | |||
| Игнатьева | |||
| М.: Недра, 1978, с.240 | |||
| СПОСОБ ПОЛУЧЕНИЯ ш ФОРМИЛОКСИАЛКАНАЛЕЙ | 0 |
|
SU306620A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Рудановский А.А., Смиттен М.К | |||
| Исследование статистических характе- i ристик микрорельефа угольных пластов | |||
| М.: ИГД им | |||
| А,А | |||
| Скочинского, 1968, 30 с. | |||
