Изобретение относится к устройствам для точного углового позиционирования и может быть использовано в области машиностроения, станкостроения, в особенности для фрезерных станков с ЧПУ.
Целью изобретения является увеличение точности и производительности оборудования, на котором используются поворотные столы за счет увеличения точности и сокращения времени позиционирования деталей, обрабатываемых или измеряемых на данном оборудовании.
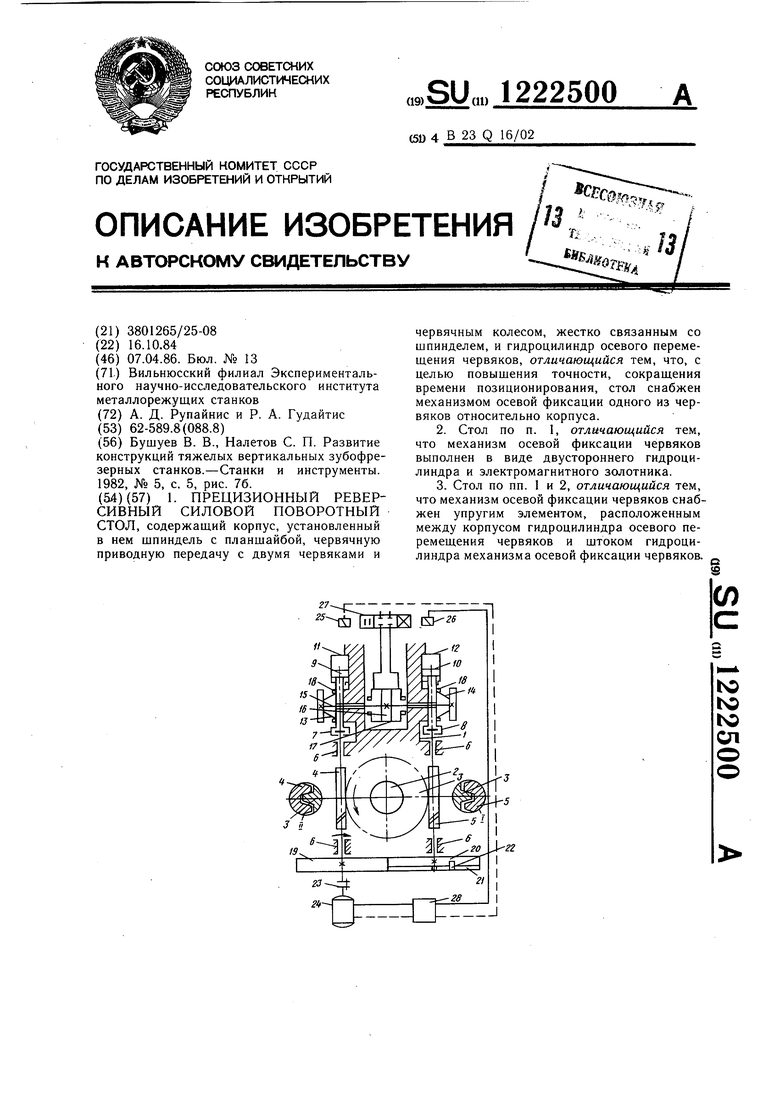
На чертеже представлено предлагаемое устройство.
В корпусе стола 1 смонтированы шпиндель с планшайбой 2 и червячным колесом 3 и два червяка 4 и 5 на радиальных опорах 6, позволяющих осевое перемещение червяков. Корпусы 7 и 8 упорных подшипников червяков связаны с поршнями 9 и 10 нагружающих цилиндров 11 и 12, закрепленных на корпусе стола 1. Для фиксации корпусов 7 и 8 упорных подшипников червяков относительно корпуса стола 1 служат упругие элементы 13 и 14, шток 15, порщень 16 и гидроцилиндр 17. На корпусах 7 и 8 установлены ограничители 18 величины сжатия упругих элементов 13 и 14. Червяки 4 и 5 соединены между собой кинематически через пару зубчатых колес 19 и 20. Зубчатое колесо 21 через упругий элемент 22 связано с зубчатым колесом 20 и входит в зацепление с колесом 19. Червяк 4 через муфту 23 получает вращение от электродвигателя 24, направление вращения которого, как и питание электромагнитов 25 и 26 золотника 27, задается блоком 28 управления. Длина штока 15 выбрана такой, чтобы при отсутствии давления в обеих полостях гидроцилиндра 17 упругие элементы создавали бы силу предварительного натяга, способную исключить смещение корпусов 7 и 8 относительно корпуса 1 от случайных воздействий или разности давлений в цилиндрах И и 12. Высота ограничителей 18 принимается меньще высоты упругих элементов на величину их суммарной деформации от силы предварительного натяга. Червяки 4 и 5 и соответствующие детали, служащие для их фиксации относительно корпуса 1, унифицированы.
Устройство работает следующим образом.
В блоке 28 управления включается вращение двигателя 24. Одновременно в цилиндрах 11 и 12 создается одинаковое давление, обеспечивающее величину желаемого натяга в червячном зацеплении. Положение золотника 27 зависит от направления вращения вала двигателя 24. Эта связь обеспечивается блоком 28 управления и электромагнитами 26. При вращении правозаходного червяка 4 по часовой стрелке (глядя со стороны двигателя) давление золотником 27 подается в левую полость цилиндра 17, при этом цилиндр 17 прижимается к корпусу 1,
а поршень 16, двигаясь вправо, через шток 15, сжимая упругий элемент 13, через ограничители 18 прижимает корпус 7 упорных подшипников червяка 4 к корпусу 1 с силой, обеспечивающей передачу червяком 4 рабочей нагрузки. Одновременно при перемещении штока 15 вправо упругий элемент 14 освобождается от предварительного натяга, а корпус 8 от поршня 10 под действием давления в цилиндре 12 перемещается в
сторону червячного колеса 3, выбирая зазоры в зацеплении (вид. I, II). Червяк 5 при этом приводится во вращение от зубчатого колеса 19 через зубчатое колесо 21, выбирающее зазор в зацеплении, и упругий элемент 22. Полезную нагрузку в данном слу чае передает червяк 4, а осевая сила, действующая при этом на червяк, воспринимается силами трения, возникающими между корпусами 7 и 1 под действием давления в цилиндре 17.
Q При реверсе двигателя 24, а тем самым и щпинделя 2 с планщайбой стола с помощью блока 28 управления, электромагнитов 25 и 26 и золотника 27 давление подается в правую полость цилиндра 17. Шток 15 перемещается влево и начинает сжимать упругий
5 элемент 14 до того, как освободился упругий элемент 13. Корпус 8 прижимается к корпусу 1 щтоком 15 через ограничители 18, при этом цилиндр 17 прижимается к корпусу 1 правой стороной, упругий элемент 13 полностью освобождается и червяк
4 под действием давления в цилиндре И остается прижатым к червячному колесу 3, выбирая зазор (вид I, II I). Полезную нагрузку в данном случае передает червяк 5, корпус 8 упорных подщипников которого прижат к корпусу 1. Червяк 5 приводится во вра щение от зубчатого колеса 19 через зубчатое колесо 20, жестко закрепленное на червяке 5. Таким образом, при любом направлении вращения двигателя и в момент реверса червяк 4 прижат к левым рабочим профи0 лям зубьев червячного колеса 3 (вид I, II) (рабочей нагрузкой и давлением в цилиндре 12, когда он передает рабочую нагрузку, или давлением в цилиндре 11, когда он служит для выборки зазора в передаче); червяк 5 - к правым профилям зубьев червячного ко5 леса 3 (вид I, I), (давлением в цилиндре 12, когда он служит для выборки зазоров в передаче, или рабочей нагрузкой и давлением в цилиндре 11, когда он передает рабочую нагрузку).
Использование предлагаемой конструкции устройства по сравнению с известной позволяет осуществить беззазорный привод поворотного стола, используемого для позиционирования и рабочих подач, как во время 5 вращения, так и в момент реверсирования. Это увеличивает точность устройства и производительность за счет уменьшения продолжительности позиционирования (после ре
верса не нужно выбирать люфт в переда-16, но и цилиндр 17 - исключает возможчах на малой скорости или вообще подхо-ность возникновения деформаций в корпусе
дит к заданной координате только с одной1 от силы зажима.
стороны). При этом величина усилия, вы-Червяки 4 и 5 могут быть установлены
бирающего зазоры в приводе, не связана сдруг над другом в одной вертикальной плосвеличиной момента от полезной нагрузки,кости и входить в зацепление с двумя чердействующей на планшайбу стола.вячными колесами, закрепленными на шпинКонструкция зажимного механизма -деле, привод от электродвигателя может
подвижен не только шток 15 с поршнембыть осуществлен через зубчатые ремни.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема синхронизации двух сервомеханизмов | 1986 |
|
SU1326788A1 |
| СПОСОБ РАБОТЫ ГАЙКОВЕРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582829C1 |
| МЯЧ | 1992 |
|
RU2018336C1 |
| Гидравлический усилитель рулевого управления транспортного средства | 1974 |
|
SU524723A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Устройство для поворота и фиксации бабки изделия | 1982 |
|
SU1047669A1 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Привод планшайбы поворотно-делительного стола | 1979 |
|
SU956876A1 |
| Переносная машина для термической резки труб | 1985 |
|
SU1294520A1 |
| Бушуев В | |||
| В., Налетов С | |||
| П | |||
| Развитие конструкций тяжелых вертикальных зубофре- зерных станков.-Станки и инструменты | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
