11
Изобретение относится к весоизмерительной технике, в частности к системам управления весами с электромагнитной компенсацией отклонения чувствительного элемента.
Цель изобретения - повьппение быстродействия системы.
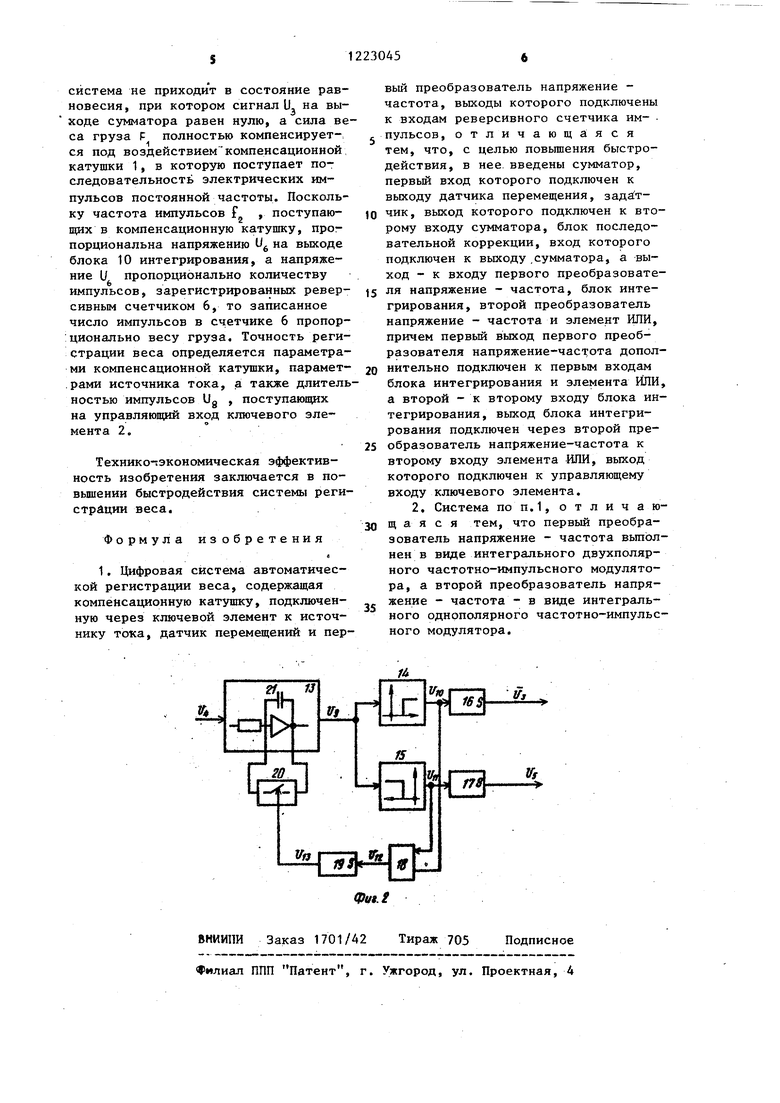
На фиг. 1 показана функциональная схема цифровой системы автоматической регистрации веса; на фиг. 2 - схема интегрального двухполярного частотно- импульсного модулятора (вариант выполнения) .
Цифровая система автоматической регистрации веса содержит компенса- ционную катушку 1, включенную через ключевой элемент 2 к источнику 3 тока, датчик 4 перемещения, первый преобразователь 5 напряжение-частота
что позволяет производить периодическую коррекцию, необходимость которой может возникнуть, например, вследствие механического износа ве25 соизмерительного устройства. Поскол ку сигнал и на выходе сумматора 7 равен нулю, то сигнал на выходе бло ка 9 последовательной коррекции U также равен нулю. На выходе преобра
,,j зователя 5 напряжение-частота отсут
JW
выходы которого подключены к реверсив- д ройку системы в нулевом положении, ному счетчику 6, сумматор 7, первьй выход которого подключен к выходу датчика ,4 перемещения, задатчик В, выход которого подключен к второму входу сумматора 7, блок 9 последовательной коррекции, вход которого подключен к выходу сумматора 7, а выход- к входу первого преобразователя 5 напряжение - частота, блок 10 интегрирования, второй преобразователь 11 напряжение-частота и элемент ИЛИ 12. Первый выход первого преобразователя ; 5 напряжение-частота подключен также к первым входам блока 10 интегрирования и элемента ИЛИ 12, а второй - к второму входу блока 10 интегрирования, выход последнего подключен через второй преобразователь 11 напряжение-частота к второму входу элемента ИЛИ 12, вькод которого подключен к управляницему входу ключевого элемента 2.
35
40
ствуют импульсы. Соответственно рав ны нулю сигналы U,, U-. и U. на выо г Я
ходах соответственно блока 10 интегрирования, второго преобразователя 11 напряжение-частота и элемента ИЛ 12. Ключевой элемент 2 находится в разомкнутом состоянии и в компенсационную катушку 1 ток от источника 3 не поступает. Под воздействием силы веса f груза происходит переме щение механической системы весоизме рительного устройства, которое реги стрируется датчиком 4 перемещения. На выходе сумматора 7 возникает сиг нал рассогласования, равный разност между нулевым и действительным значением перемещения механической системы,с учетом заданного масштаба Сигнал рассогласования Uj поступает через блок 9 последовательной корре
Преобразователь 5 напряжение-частота может быть выполнен, например, по схеме фиг. 2 и содержать.интегратор 13, выход которого подключен к двум параллельным цепям, каждая из которых содержит несимметричные релейные элементы 14 и f5, соединенные последовательно соответственно с одновибраторами 16 и 17, элемент ИЖ 18, входы которого соединены соответственно с выходами несимметричных релейных элементов 14 и 15, а выход - через одновибратор 19 к управляющему входу ключевого элемента 20,. подключенного параллельно конденсатору 21 интегратора 13.
При использовании в качестве второго преобразователя 11 напряжение- частота интегрального однополярного частотно-импульсного модулятора, пре- образователь 11 напряжение-частота может быть выполнен, например, также по схеме фиг. 2, но при исключении элементов 15, 17 и 18 и при непосредственном соединении выхода элемента 14 с входом одновибратора 19.
Система автоматической регистрации веса работает следующим образом.
В исходном состоянии при отсутствии взвешиваемого груза в весоизмерительном устройстве с датчика 4 перемещения в сумматор 7 поступает сигнал U , который полностью компенсируется сигналом и, с выхода задатчи ка 8. Последний обеспечивает настчто позволяет производить периодическую коррекцию, необходимость которой может возникнуть, например, вследствие механического износа весоизмерительного устройства. Поскольку сигнал и на выходе сумматора 7 равен нулю, то сигнал на выходе блока 9 последовательной коррекции U также равен нулю. На выходе преобразователя 5 напряжение-частота отсут
ройку системы в нулевом положении,
ствуют импульсы. Соответственно равны нулю сигналы U,, U-. и U. на выо г Я
ходах соответственно блока 10 интегрирования, второго преобразователя 11 напряжение-частота и элемента ИЛИ 12. Ключевой элемент 2 находится в разомкнутом состоянии и в компенсационную катушку 1 ток от источника 3 не поступает. Под воздействием силы веса f груза происходит перемещение механической системы весоизмерительного устройства, которое регистрируется датчиком 4 перемещения. На выходе сумматора 7 возникает сигнал рассогласования, равный разности между нулевым и действительным значением перемещения механической системы,с учетом заданного масштаба. Сигнал рассогласования Uj поступает через блок 9 последовательной коррекции (сигнал и на выходе блока 9 последовательной коррекции) на вход первого преобразователя 5 напряжение-частота. Структура блока последовательной коррекции определяется
динамическими характеристиками системы и, в том числе, динамическими характеристиками механической системы весоизмерительного устройства. В
простейшем случае блок последовательной коррекции может представлять собой усилитель напряжения, используемый для настройки общего коэффициента усиления следящей системы. ,
Так как предлагаемая цифровая система автоматической регистрации веса является существенно нелинейной системой из-за наличия частотно-импульсной модуляции управляющего сигнала, ю при определенных характеристиках системы возможны автоколебания, уменьшающие точность работы устройства. Благодаря наличию блока 9 последова- I тельной коррекции эти режимы могут быть исключены, например, при применении в его структуре псевдолинейнык корректирующих звеньев. С выхода блока 9 последовательной коррекции сигнал и поступает на вход первого преобразователя 5 напряжение-частота, преобразовывающего аналоговый сигнал и в последовательность модулированных по частоте и знаку импульсов. В зависимости от знака рассогласования импульсы на выходе преобразователя 5 появляются на его первом или втором выходе. Частота импульсов на выходе преобразователя 5 пропорциональна величине входного сигнала.
При выполнении.преобразователя 5 по схеме фиг. 2 его работа осуществляется следующим образом.
Входной сигнал U поступает на вход интегратора 13 и интегрируется. При достижении сигналом на выходе интегратора величины,.определяемой настройкой зоны нечувствительности соответствующего по полярности сигнала Uj несимметричного релейного зленость, вследствие чего импульсы в преобразователе 5 формируются одно- вибратором 17. В целом частотно-импульсный модулятор образует пропорциональный блок с погрешностью приближения, определяемой длительностью импульса и величиной ступеньки квантования, определяемой зоной нечувствительности несимметричных релейных элементов 14 и 15. С соответствующего выхода преобразователя 5 импульсы поступают на первый вход реверсивного счетчика 6, где производится их суммирование, на первый вход бло- ка 10 интегрирования и на первый вход элемента ИЛИ 12. Благодаря поступлению сигнала Ug на первый вход элемента ИЛИ 12 на выходе его возтакже представ20
25
30
35
никает сигнал U. , ляюпщй собой последовательность импульсов, поступающих на управляниций вход ключевого элемента 2. Происходит периодическое подключение компенсационной катушки 1 к источнику 3 тока вследствие чего происходит перемещение механической системы весоизмерительного устройства в нулевое полвжение.
В соответствии с описанной работой элементов схемы в первоначальный момент управления происходит по пропорциональному закону, обеспечивающему быcтpOjc eйcтвиe системы. Одновременно сигнал Ug поступает на вход блока 10 интегрирования, на вьпсоде которого возникает напряжение U , поступающее на вход второго.преобразователя 11 напряжение-частота. Сигнал и
преобразуется преобразоваУ . .телем 11 в последовательность импульмента 14 или 15, последний срабатыва- ° сов Ц ,- также постзшающих на элемент ИЛИ 12. Последовательное вклй- чение блока 10 интегрирования и преобразователя 11 напряжение-частота образует интегральный канал регулироет, формируя на выходе кусочно-постоянный сигнал, по переднему фронту которого осуществляется запуск соот- ветствующего одновибратора 16 или 17, а также одновибратора 19 благодаря прохождению сигналов , или Ц через элемент ИЛИ 18 (сигнал и,„ на выходе элемента ИЛИ 18) на вход одно- вибратора. Одновибраторы 16 и 17 формируют импульсы, длительность которых определяется заданным коэффициентом усиления и требуемой точностью измерения веса груза. В первоначальный момент времени до первого момента времени, когда после воздействия веса Г груза механическая система впервые занимает нулевое положение, сигнал Uj имеет положительную поляр-
45
50
55
вания, обеспечивахиций отсутствие стй- тической ошибки в работе системы. При изменении знака сигнала I/. на входе преобразователя 5 при переходном процессе, начинают формироваться импульсы (Jj на втором выходе преобразователя 5, поступающие на второй вход реверсивного счетчика 6 импульсов, которые вычитаются из предыдущей суммы, а также на второй вход блока 10 интегрирования, вызывая уменьшение по абсолютной величине сигнала U на его выходе. Описанный процесс повторяется до тех пор, псжа
,
ю
ность, вследствие чего импульсы в преобразователе 5 формируются одно- вибратором 17. В целом частотно-импульсный модулятор образует пропорциональный блок с погрешностью приближения, определяемой длительностью импульса и величиной ступеньки квантования, определяемой зоной нечувствительности несимметричных релейных элементов 14 и 15. С соответствующего выхода преобразователя 5 импульсы поступают на первый вход реверсивного счетчика 6, где производится их суммирование, на первый вход бло- ка 10 интегрирования и на первый вход элемента ИЛИ 12. Благодаря поступлению сигнала Ug на первый вход элемента ИЛИ 12 на выходе его возтакже представ20
5
0
5
никает сигнал U. , ляюпщй собой последовательность импульсов, поступающих на управляниций вход ключевого элемента 2. Происходит периодическое подключение компенсационной катушки 1 к источнику 3 тока вследствие чего происходит перемещение механической системы весоизмерительного устройства в нулевое полвжение.
В соответствии с описанной работой элементов схемы в первоначальный момент управления происходит по пропорциональному закону, обеспечивающему быcтpOjc eйcтвиe системы. Одновременно сигнал Ug поступает на вход блока 10 интегрирования, на вьпсоде которого возникает напряжение U , поступающее на вход второго.преобразователя 11 напряжение-частота. Сигнал и
преобразуется преобразовасов Ц ,- также постзшающих на элемент ИЛИ 12. Последовательное вклй- чение блока 10 интегрирования и преобразователя 11 напряжение-частота образует интегральный канал регулиро
вания, обеспечивахиций отсутствие стй- тической ошибки в работе системы. При изменении знака сигнала I/. на входе преобразователя 5 при переходном процессе, начинают формироваться импульсы (Jj на втором выходе преобразователя 5, поступающие на второй вход реверсивного счетчика 6 импульсов, которые вычитаются из предыдущей суммы, а также на второй вход блока 10 интегрирования, вызывая уменьшение по абсолютной величине сигнала U на его выходе. Описанный процесс повторяется до тех пор, псжа
система не приходит в состояние равновесия, при котором сигнал и, на выходе сумматора равен нулю, а сила веса груза F полностью компенсируется под воздействием компенсационной катушки 1, в которую поступает последовательность электрических импульсов постоянной частоты. Поскольку частота импульсов f , поступающих в компенсационную катушку, прог порциональна напряжению U на выходе блока 10 интегрирования, а напряжение и пропорционально количеству импульсов, зарегистрированных реверсивным счетчиком 6, то записанное число импульсов в счетчике 6 пропор ционально весу груза. Точность регистрации веса определяется параметрами компенсационной катушки, парамет.рами источника тока, а также длительностью импульсов Ug , поступающих на управляющий вход ключевого элемента 2.
Технико-тэкономическая эффективность изобретения заключается в повышении быстродействия системы регистрации веса.
Формула изобретения
в
1. Цифровая система автоматической регистрации веса, содержащая компенсационную катушку, подключенную через ключевой элемент к источнику тока, датчик перемещений и пер8i
йн
вый преобразователь напряжение - частота, выходы которого подключены к входам реверсивного счетчика им- . пульсов, отличающаяся тем, что, с целью повьшения быстродействия, в нее. введены сумматор, первьй вход которого подключен к выходу датчика перемещения, зада(тчик, выход которого подключен к второму входу сумматора, блок последовательной коррекции, вход которого подключен к выходу .сумматора, а выход - к входу первого преобразователя напряжение - частота, блок интегрирования, второй преобразователь напряжение - частота и элемент ИЛИ, причем первый выход первого преобразователя напряжение-част ота дополнительно подключен к первым входс1м блока интегрирования и элемента ИЛИ, а второй - к второму входу блока интегрирования, выход блока интегрирования подключен через второй преобразователь напряжение-частота к второму входу элемента ИЛИ, выход которого подключен к управляющему входу ключевого элемента.
2. Система поп.1,отличаю- щ а я с я тем, что первый преобразователь напряжение - частота выполнен в виде интегрального двухполяр- ного частотно-импульсного модулятора, а второй преобразователь напряжение - частота - в виде интегрального однополярного частотно-импульсного модулятора.
-tn
ni
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство автоматической регистрации веса | 1985 |
|
SU1368649A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Электромагнитные весы | 1988 |
|
SU1627854A1 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
| Весы с автоматическим уравновешиванием | 1987 |
|
SU1534327A1 |
| Измеритель активной мощности | 1978 |
|
SU744354A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Автоматические весы | 1986 |
|
SU1381339A1 |
| Суммирующие весы | 1984 |
|
SU1268963A1 |
Изобретение относится к весоизмерительной технике, в частности к системам управления весами с электромагнитной компенсацией отклонения чувствительного элемента. Цель изобретения - повышение быстродействия системы. Устройство содержит компенсационную катушку 1. включенную через ключевой элемент 2 к источнику 3 тока, датчик 4 перемещения, преобразователь 5 напряжение - частота, реверсивный счетчик 6. Новым в устройстве является введение сумматора 7, задат- чика 8, блока 9 последовательной коррекции, блока 10 интегрирования, второго преобразователя 1.1 напряжение - частота и элемента ИЛИ 12, связанных между собой и другими элементами устройства определенным образом, что позволяет достичь поставленную цель изобретения. 1 з.п. ф-лы. 2 ид. 5 to 00 О 0 ел
ВНИИПИ Заказ 1701/А2 Тираж 705 Подписное «филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кнорринг В.Г | |||
| и др | |||
| Автоматическая коррекция аддитивной погрешности цифровых электронных весов | |||
| - Труды Ленинградского политехнического института, 1982, 381, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
