сл
&0
9д
00
о
4 СО
1368649
сумматора 6 возникает сигнал рассогласования, поступающий на вход блока 10 коррекции, с вькода которого сигнал поступает на вход преобразователя М напряжение-частота, где преобразуется.в последовательность импульсов, модулированных по знаку и частоте. Размыкается ключевой элемент 4, На выходе сумматора 8 скачком изменяется сигнал и в течение дпительности импульса с выхода преобразователя 11 происходит его интегрирование интегратором 14 и блоком 15
интегрирования. При работе элементов схемы исключается запаздывание при передаче информации между преобразователями 11 и 12 напряжение-частота. По истечении переходного процесса сила веса груза компенсируется под воздействием компенсационной катушки 1, в которую поступают импульсы тока от источника 2. Устранение запаздывания интегральной составляющей закона регулирования позволяет повысить динамические характеристики регистрации веса. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматической регистрации веса | 1984 |
|
SU1223045A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1425832A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Компенсационный акселерометр | 2020 |
|
RU2738877C1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
| Устройство для регулирования температуры | 1980 |
|
SU907514A2 |
| Тензометрическое устройство с автоматической установкой нуля | 1980 |
|
SU916970A1 |
Изобретение относится к весоизмерительной технике. Цель изобретения - повышение быстродействия. При помещении груза в весоприемное устройство происходит перемещение механической системы весоизмерительного устройства, которое регистрируется датчиком 5 перемещения. На выходе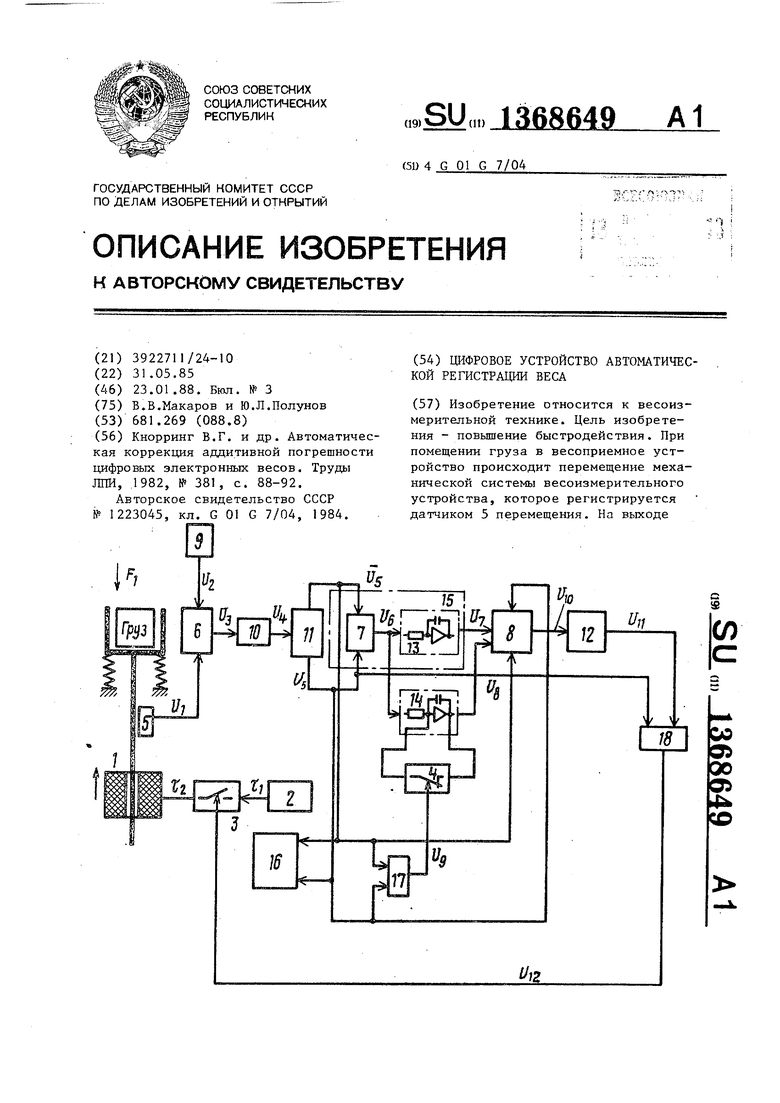
1
Изобретение относится к весоизмерительной технике, в частности к устройствам управления и регистрации для весов, имеющих электромагнитную систему компенсации отклонения чувствительного элемента.
Цель изобретения - повьппение быстродействия.
На чертеже показана структурная схема устройства.
Устройство содержит компенсационную катушку 1, подключенную к источнику 2 тока через первый ключевой . элемент 3, второй ключевой элемент 4, датчик 5 перемещения, первый сумматор 6, суммирующий элемент 7, второй сумматор 8, задатчик 9, блок 10 последовательной коррекции, первый преобразователь 11 напряжение - час- тота, второй преобразователь 12 напряжение - частота, узел 13 интегрирования, интегратор 14, блок 15 интегрирования, образованный из суммирующего элемента 7 и узла 13 интегри- рования, реверсивньй счетчик 16 импульсов, второй элемент ИЛИ 17 и первый элемент ИЛИ 18.
Датчик 5 перемещения и задатчик 9 подключены к входам первого сумматора 6, соединенного через блок 10 последовательной корекции с первым цре- образователем 11 напряжение - частота, выходы которого соединены с входами блока 15 интегрирования, реверсивного 16 счетчика импульсов, второй схемы ИЛИ 17 и третьим и четвертым входами второго сумматора 8.
f. 0 5
0
5
Первый вход второго сумматора 8 соединен с выходом интегратора 14, а второй вход - с вторым выходом блока 15 интегрирования.
Вход интегратора 14 подключен к первому выходу блока 15 интегрирования .
Интегратор 14 шунтирован вторым ключевым элементом 4, управляющий вход которого подключен к выходу второго элемента ИЛИ 17.
Первый и второй входы первого элемента ИЛИ 18 подключены, соответственно, к выходам второго 12 и первого 11 преобразователей напряжение - частота, а выход элемента ИЛИ 18 подключен к управляющему входу первого ключевого элемента 3.
Выход второго сумматора 8 соединен с входом второго преобразователя 12 напряжение - частота. I....
Устройство работает следующим об- разом.
В исходном состоянии при отсутствии взвещиваемого груза с датчика 5 перемещения в сумматор 6 поступает сигнал и,, который полностью компенсируется сигналом и с выхода задат- чика 9. Последний обеспечивает настройку схемы в нулевом положении, что позволяет производить периодическую коррекцию, необходимость которо й может возникнуть, например, вследствие механического износа весоизмерительного устройства. Лри равенстве нулю сигнала U,, соответственно, равны нулю сигналы U, U;-, U,-, Ug, Ug,
U . В исходном состоянии сигнал U с выхода блока 15 интегрирования может не быть равным нулю и на выходе преобразователя 12 напряжение - частота поддерживается частота импульсов, необходимая для перемещения весоизмерительного устройства в нулевое положение без измеряемого груза. Поэтому состояние механической системы прак- тически не влияет на динамические и статические характеристики системы. При помещении груза в весоприем- ное устройство под воздействием веса груза F происходит перемещение меха нической системы весоизмерительного устройства, которое регистрируется датчиком 5 перемещения. На выходе сумматора 6 возникает сигнал рассогласования U , поступающий на вход блока 10 последовательной коррекции. С выхода последнего сигнал U поступает на вход преобразователя 11 напряжение - частота, где преобразуется в последовательность импульсов, модулированных по знаку и частоте.
В случае, если весоизмерительная сис находится ниже нулевого положе-
сигнал и, уменьшается, сигнал
тема ния,
рассогласования U, меньше нуля, сиг- нал и также меньше нуля и появляются импульсы Uj на первом выходе преобразователя 11 напряжение - частота Импульсы поступают на плюсовой вход сумматора 7 блока 15 интегрирования, на первый вход реверсивного счетчика
16импульсов, на третий вход сумматора 8, на одни входы элементов ИЛИ
17и 18, Возникает сигнал U, на выходе элемента ИЛИ 17 и размыкается ключевой элемент 4, На выходе сумматора 8 скачком изменяется сигнал U, и в течение длительности импульса с выхода преобразователя 11 происходит его интегрирование интегратором 14
и блоком 15 интегрирования. Поскольку выходы блока 15 и интегратора 14 включены, соответственно, к плюсовому и минусовому входам сумматора 8, в течение импульса изменения величины сигнала и,д на выходе сумматора 8 не происходит при равенстве К ,- эффи- циентов передачи интеграторов. По истечении времени импульса с выхода преобразователя 11 замыкается ключевой элемент Ч, прекращается интегрирование и в случае, если весовые коэффициенты входов выбраны соответст- вую1цим образом, то на выходе сумма
68649
. тора
сохраняется значение напряжения, равное напряжению в момент начала импульса. Таким образом, при работе элементов схемы исключается запаздывание при передаче информации между преобразователями напряжение - частота,
Схема преобразователя 12 напряже- . ние - частота строится таким образом, что увеличение частоты импульсов на его выходе происходит при увеличении отрицательного значения напряжения на его входе в рассматриваемом примере реализации. Таким образом, общее число импульсов и на управляющем входе ключевого элемента 3 определяется импульсами U,- и U,, на входах элемента ИЛИ 18. Импульсы Uj- определяют пропорциональную составляю
щую
и ц
закона регулирования, а импульсы интегральную.- После переходного режима, в течение которого повторяется описанный процесс, система приходит в состояние равновесия, при котором сигнал рассогласования U равен нулю. Если при переходном процессе изменяется знак рассогласования, то появляются импульсы на втором выходе преобразователя 1I напряжение - частота, поступающее на второй вход реверсивного счетчика 16, на плюсовой вход сумматора 8 и на минусовой вход сумматора 7. По истечении переходного процесса сила веса груза полностью компенсируется под воздействием компенсационной катушки I, в которую поступают импульсы тока от источника 2. Поскольку частота импульсов, поступающая в компенсационную катупку, пропорциональна напряжению 11-, на выходе блока интегрирования в установившемся режиме, а напряжение U пропорционально числу импульсов, зарегистрированных реверсивным счетчиком 16, то записанное число в счетчике пропорционально весу груза. Точность регистрации веса определяется параметрами компенсационной катушки, источника тока и длительностью импульсов на управляющем входе ключевого элемента 3. Устранение запаздывания интегральной составляющей закона регулирования позволяет повысить динамические характеристики системы регистрации веса.
Формула изобретения Цифровое устройство автоматической регистрации веса, содержащее компенсационную катушку, подключенную через первый ключевой элемент к источ- нику тока, датчик перемещения грузо- приемной чашки весов и задатчик, выходы которых-подключены к входам первого сумматора, соединенного через блок последовательной коррекции с первым преобразователем напряжение - частота, блок интегрирования и реверсивный счетчик импульсов, входы которых подключены к выходам первого преобразователя напряжение - частота, первый элемент ИЛИ, первый вход которого подключен к выходу второго пре- образователя напряжение - частота, второй вход - к выходу первого преобразователя напряжение - частота, а выход - к управляющему входу перво
го ключевого элемента,
о т л и
повьшзения быстродействия, в него введены интегратор, вход которого подключен к первому выходу блока интегрирования, второй сумматор, к первому входу которого подключен выход интегратора, а к второму входу - выход блока интегрирования, второй- ключевой
элемент, включенный параллельно интегратору, второй элемент ИЛИ, входы которого подключены к выходам первого преобразователя напряжение - частота, а выход - к управляющему входу второго ключевого элемента, выходы первого преобразователя напряжение - частота подключены к третьему и четвертому входам в горого сумматора, выход которого соединен с входом второго
преобразователя напряжение- частота.
| Кнорринг В.Г | |||
| и др | |||
| Автоматическая коррекция аддитивной погрешности цифровых электронных весов | |||
| Труды ЛПИ, 1982, № 381, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Цифровая система автоматической регистрации веса | 1984 |
|
SU1223045A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
