1.
Изобретение относится к весоизмерительной технике, в частности к уст ройствам для взвешивания железнодорожных вагонов на ходу в составе поезда.
Известно устройство для взвешивания движущихся объектов, содержащее весовую платформу с датчиком веса и путевыми датчиками, блок управления, блок приема информации, узел сравнения, сумматор и блок памяти 1Д.
Недостаток данного устройства незащищенность от нестационарньк помех .
Наиболее близким к предлагаемому по технической сущности является устройство для динамического взвешивания, содержащее весоизмерительные датчики, подключенные через фильтр высоких частот к аналого-цифровому . преобразователю, выходы которого подсхзединены к блоку определения экстремумов и через сумматор участка измерения к сумматору интервала измерения, счетчик дискретизаций участка измерения, сумматор дискретизаций интервала и блок деления, подключенньй к регистрирующему прибору 2J .
Время измерения в прототипе ограничено промежутками о , меньшими полупериода помехи, в то время как увеличение времени интегрирования повышает точность измерения. С этой точки зрения метрологически выгодно использовать для измерения весь промежуток времени, когда объект (или его часть) прокатывается по весам. Определение экстремумов с помощью различного рода формирователей не может обеспечить надежной работы устройства. Мешающий сигнал, экстремумы которого необходимо определить, имеет частоту 3-10 Гц, но другие нестационарные составляющие помехи имеют вид пачек импульсов значительно большей частоты или одиночных всплесков, так что отношение сигнал - помеха после дифференцирования значительно ухудшается. Таким образом, незащищенность от нестационарных помех и даже предрасположенность к ним вследствие наличия дифференциатора является серьезным недостатком прототипа, снижающим его точность при неравномерном движении состава, наличии дефектов железнодорожного пути или вследствие влияния сцепок.
37330t
Цель изобретения - повышение точности путем уменьшения влияния нестационарных помех.
Поставленная цель достигается тем, 5 что в устройство для динамического взвеи1ивания, содержащее весоизмерительные датчики, подключенные через фильтр высоких ЧАСТОТ к аналого-1Ц1фровому преобразователю, выходы которого подсоединены к блоку определения экстремумов и через сумматор участка измерения к сумматору интервала измерения, счетчик дискретизацией участка измерения, сумматор
15 дискретизаций участка измерения, сумматор дискретизаций интервала и :блок деления, подключенный к регистрирующему прибору, введены задатчик кондиции измерений со схемой
0 сравнения, сумматоры кондиционных и некондиционных дискретизаций, сумматор кондиции, анализатор качества измерения и ключевая схе- ма, причем информационные входы
5 ключевой схемы подключены к выходам сумматоров интервала измерения и кондиции, сумматора дискретизаций интервала и сумматора кондиционных дискретизаций, а выходы ключевой схемы подQ ключены к входам блока деления, входы анализатора качества измерения подключены к выходам сумматора дискретизаций интервала и. сумматора некондиционных дискретизаций, а выход - к , управляющему входу ключевой схемы, выходы счетчика дискретизаций участка измерений подключены к входам сумматора дискретизаций интервала, сумматоров кондиционных и некондиционных дискретизаций и к входам схемы сравнения, а входы сумматора кондиции подключены к выходам сумматора участка измерения.
Задатчик кондиции со схемой сравнения обеспечивают разделение участков измерения на кондиционные и некондиционные с формированием команд Кондиция и Некондиция. В качестве критерия кондиционности может 0 быть принято, например, число дискретизаций в участке, или продолжительность участка. Основанием для такого выбора служит то, что при хороших условиях измерения, без рывков и замедлений состава, а также при соответствующем качестве пути выходное воздействие весоизмерительных датчиков имеет вид синусоиды, причем если
скорость движения достаточно велика, то синусоида не затухает..
Частота синусоиды для данных весов и широкого класса объектов (вагонов) устойчиво сохраняется с изменением веса объектов в широких пределах, что является признаком хорошего качества измерения.
Сумматоры кондиционных и некондиционных дискретизаций обеспечивают совместно с анализатором качества измерения оценку выходного сигнала весоизмерительных датчиков во всем интервале измерения.
Сумматор кондиции дает возможност в сочетании с сумматором кондиционных дискретизаций произвести подсчет очищенных от нестационарных помех данных.
Ключевая схема обеспечивает работу устройства в 100% случаев. Когда кондиционных измерений достаточно, берется очищенный от помех результат а при недостатке кондиционных данных ,т.е. при высоком уровне нестационарных помех, результат вычисляется исходя из неочищенных данных по всему интервалу. При этом в любом случае с помощью анализатора качества измерения оператор наблюдает, как происходит процесс, и активно регулирует качество измерения, изменяя характер перемещения состава.
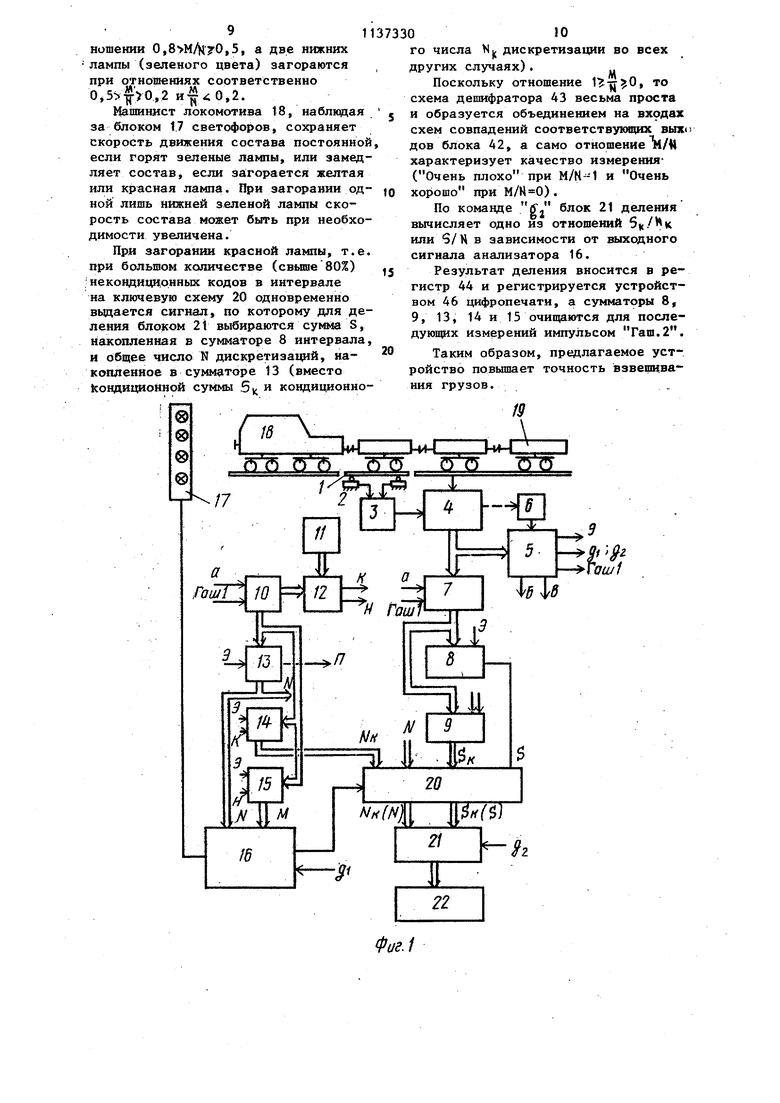
На фиг. 1 представлена блок-схема предлагаемого устройства для динамического взвешивания; на фиг.2-5 блоки устройства; на фиг. 6 - временные диаграммы, поясняю1Щ1е работу.
Устройство для динамического взвешивания (фиг. 1) содержит весовую платформу 1, опирающуюся на весоизмерительные датчики 2, выходное воздействие которых через фильтр 3 высоких частот подается на аналого-цифровой преобразователь 4, например, типа Ф 7077/1. .
Код аналого-цифрового преобразователя 4 поступает на блок 5 определения экстремумов, работающий по командам датчика 6 измерения, и на сумматор 7 участка, связанный с сумматором 8 всего интервала измерения и сумматором 9 кондиции.
Датчик 6 может быть выполнен в виде совокупности сигнализаторов положения вагона (или его части) и элементов управления, формирующих сигнал измерение при наезде на весовую платформу 1 оси тележки или вагона в зависимости от типа взвешивания (поосное,, потележное или повагонно4) . Наприме, для поосного взвешивания при длине весовой платформы меньшей любого межосевого рас- стояния (т.е. когда на весовой платформе не может находиться более одной оси) датчик 6 представляет собой датчик наезда, регистрирукнций наезд по перепаду сигнала весоизмеритепьного датчика 2.
Число принятых в сумматор 7 кодов подсчитывается счетчиком 10 дискретизаций, выходы которого, как и выходы задатчика 11 кондиции, подсоединены к схеме 12 сравнения. Число кодов в интервале измерения подсчитывается сумматором 13, причем с помощью суммторов 14 и 15 отдельно учитывается количество кондиционных и некондиционных кодов.
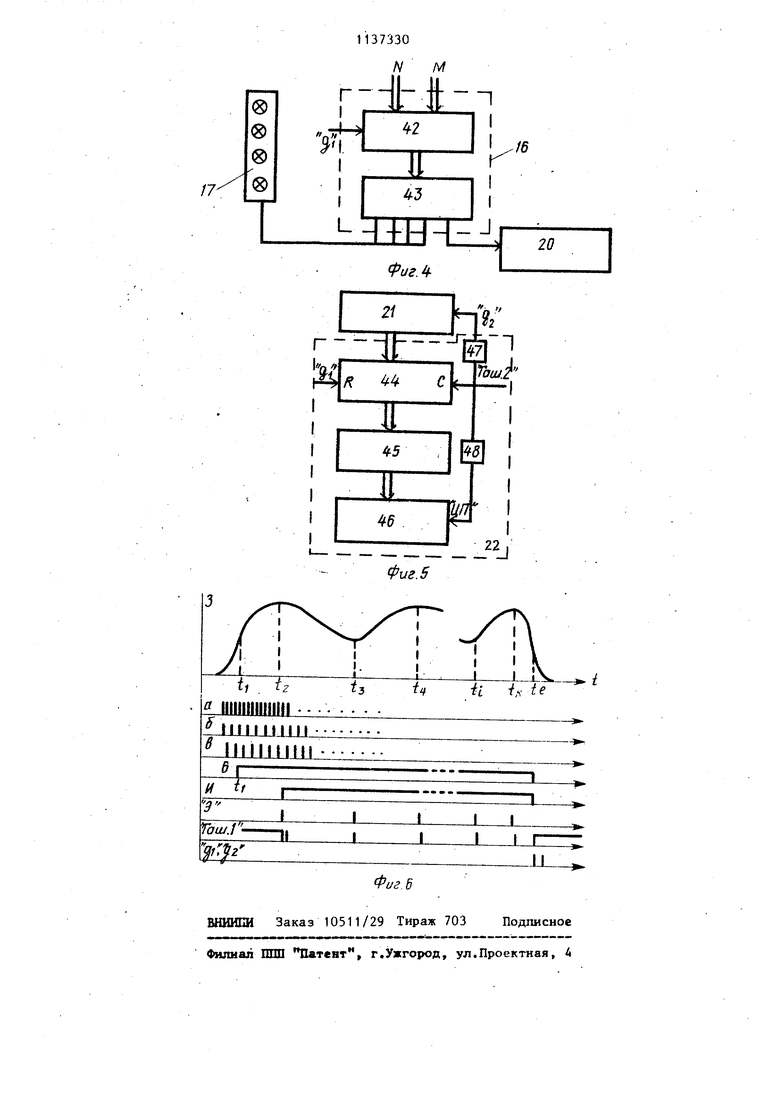
Выходы сумматора 13 дискретИзащш интервала и сумматора 15 некондиционных дискретиза1Щй подключены к входам анализатора 16 качества измерения, работакицеРо, например, на блок 17 светофоров, установленных вблизи железнодорожного пути, по которому локомотив 18 перемещает вагоны 19.
Выходы сумматоров 8 и 9 интервала и кондиции, а также сумматоров 13 и 14 дискретизаций интервала и кондиционных дискретизаций подсоединены к входам ключевой схемы 20, а выхода последней - к входам блока 21 деления , скоммутированного с регистрирующим устройством 22.
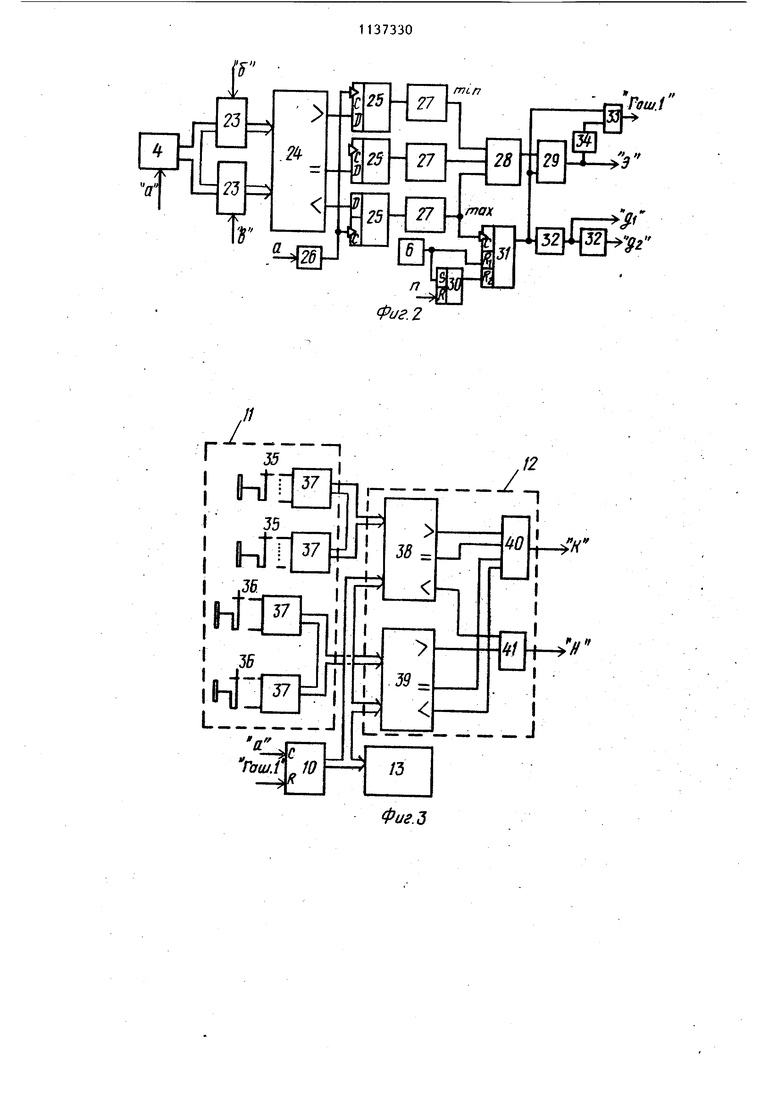
Блок 5 определения экстремума (фиг. 2) содержит (вариант выполне ния) буферные регистры 23, в которые с помощью строб-импульсов б и в заносится код аналого-цифрового преобразователя 4, и схему 24 сравнения с выходами У, и , каждый из которых подключен к D-входу одного из триггеров 25, причем на С-входы последних через элемент 26 задержки подается строб-импульс а.
Триггеры 25 через одновибраторы 27 связаны со схемами 28 и 29 совпадения, причем на вькоде последней формируется команда зкстремума Э. Для формирования интервала измерения применены наряду с датчиком 6 измерения триггеры 30 и 31. При срабатывании датчика 6 снимается потенциал гашения с входа R триггера 31 и по приходу на С-вход первого импульса экстремума Э триггер 31 возбуждается, открывая схему 29 совпадения, благодаря чему импульсы Э начинают поступать на сумматоры 8, 9, 13, 14 и 15. Таким образом, обеспечивается работа устройства начиная с пер вого максимума выходного воздействия При отпускании датчика 6 триггер 31устанавливается в исходное положе ние и работа по суммированию прекраищется. Для обеспечения однократного изме рения при малых скоростях движения состава или при остановке состава на весах применен триггер 30, на вход R которого подана команда П (Перепо нение) с сумматора 13 дискретизаций интервала. Команда Переполнение формируется объединением выходов сумматора 13 схемами совпадения таким образом, ч,то при емкости сумматора, предположим, 999 единиц, импульс переполнения получают при 850 единицах так, чтобы текутдай участок измерения, при котором происходит переход через 850 единиц, бьш отображен в сумматоре 13 правильным числом, что необходимо для дальнейших подсчетов. При приходе импульса Переполнение потенциалом с прямого выхода триггера 30 триггер 31 устанавливает ся по входу RO, что эквивалентно по выходным сигналам блока 5 отпусканию датчика 6. Триггер 31 может быть воз булден только после отпускания и повторного срабатывания датчика 6. Таким образом, обеспечивается выбор конца интервала измерения. При отпускании датчика 6 и установке триггера 31 с выходов последовательно включенных одновибраторов 32поступают команды / и rf/ на. анализатор 16 качества измерения и блок 21 деления. Схема 33 совпадения совместно с задержкой 34 формируют импульсы гашения Гаш.1 для счетчика 10 дискретизаций участка и сумматора 7 участка. На счетный вход счетчика 10 дискретизаций участка поступают импульсы а с частотой работы аналого-цифрового преобразователя 4, а на вход R импульсы гашения Гаш.1 блока 5 определения экстремумов. Задатчик 11 конди1;ии состоит, например, из переключателей 35 нижнего предела, переключателей 36 верхнего предела и преобразователей 37 кода из десятичного и двоично-десятичный код. Схема 12 сравнения содержит схему 38 сравнения по нижнему пределу, схему 39 сравнения по верхнему пределу, схему 40 совпадения кондиции и схему 41 совпадения некондиции. Схемы 38 и 39 могут быть, например, типа 555СП1. Анализатор 16 качества измерения (фиг. 4) содержит, например, блок 42 деления (например, как и блок 21 де ления, типа АЛУ 1550ПЗ) и дешифратор 43, выбранные выходы которого подключены к различным лампам блока 17 светофоров и управляющему входу ключевой схемы 20. Регистрирующее устройство 22 в зависимости от типов взвешивания (повагонное, потележечное или поосное) имеет различные исполнения. Блок-схема регистрирующего устройства 22 для повагонного взвешивания представлена на фиг. 5. В этом случае регистрирующее устройство 22 содержит регистр 44 памяти, дешифратор 45, устройство 46 цифропечати и элементы 47 и 48 задержки времени. В случае потележечного или поосного взвешивания вместо регистра 44 устанавливается сумматор веса тележек или осей, элемент 48 .отсутствует, сигна:л цифропечати (ЦП) подается на устройство 46 при определении конца вагона, а гашение сумматора производится импульсом конца цифропечати. Конец вагона может быть определен известным способом, например, с помощью оптических датчиков, регистрируюш х просвет между вагонами в районе сцепки. Устройство для динамического взвешивания работает следующим образом. Пусть выходной сигнал весоизмерительного датчика 2 на выходе фильтра 3 имеет вид, соответствующий позиции 3 фиг. 6. Частота среза фильтра 3 высоких частот выбирается в диапазоне 2040 Гц, так что сравнительно высокочастотные составляющие помехи выходного воздействия отфильтровываются без ущерба для быстродействия устойства. В то же время низкочастотная составляющая помехи, лежащая в иапазоне 3-10 Гц, сохраняется. 7.1 . Аналого-цифровой преобразователь 4 постоянно с частотой а, выбираемой в диапазоне 400-800 Гц, запускается в режим измерения (позииля д, фиг,6) Пусть в момент времени t,j срабаты вает датчик 6 измерения (позиция 6, фиг. 6), благодаря чему снимается потенциал гашения с входа RJ триггера 31 и запрещаюпщй потенциал с входа схемы 29 совпадения (фиг. 2). Нечетными импульсами & и четными импульсами { из последовательности а соответственно позициями 8 и Ь на фиг. 6 код преобразователя 4 попе ременно заносится в буферные регистры 23. Вырабатываемый схемой 24 срав нения сигнал Больше, Меньше или Равно поступает на информационный вход одного из регистров 25 и через одновибраторы 27 поступает на С-вход триггера 31 и схему 28 совпадения. Первым максимумом выходного воздействия в момент времени (Фиг.6) возбуждается триггер 31, снимая гася щий сигнал Гаш.1 с сумматора 7 участка и счетчика 10 дискретизацией участка (позиция И - Измерение на фиг. 6). На выходе схемы 29 в моменты времени trt, tn, , .. t; , t появляются сигналы Э согласно.Э на фиг. 6. Поскольку гасящий сигнал с сумматора 7 участка и счетчика 10 дискретизаций участка снят, то с момента времени t.2 ДО момента времени t-j сумматор 7 суммирует все текущие дискре тизации, а счетчик 10 подсчитывает число внесенных в сумматор 7 кодов. В момент времени t содержимое сумматора 7 участка передается в сум матор 8 интервала и при наличии сигнала К (Кондиция) также в сумматор 9 кондиции). Далее сумматор 7 сигналом Гаш.1 очищается. Кроме того, в момент времени t содержимое счетчика 10 дискретизаций участка передается импульсом Э в сумматор 13 дискретизаций интервала и в один из сумматоров 14 или 15 в зависимости от того, какой сигнал И (Некондиция) или К (Кондиция вьщается в момент времени мой 12 сравнения. Переключатели 35 и 36 заранее с учетом частоты а и частоты колебаний системы вагон - весы, являющейся устойчивой величиной для конкретного 308 экземпляра весов, устанавливаются нижний и верхний пределы кондиционного числа дискретизаций в участке. Например, для весов с частотой колебаНИИ 4 Гц и работе преобразователя 4 . с частотой а 640 Гц ожидаемое число дискретизаций на участке t - tл (равном полупериоду помехи), составляет 80. Переключателям 35 нижнего предела в этом случае может быть набрано, например, число 60, а переключателями 36 верхнего предела число 100. Величина установок уточняется в процессе опытной эксплуатации путем установления компромисса между требуемой точностью измерения и возможностью обеспечения приемлемых условий эксплуатации (состояние пути, скорость движения и ее постоянство и др.). Аналогично описанному в течение всего интервала измерения t сумматор 7 участка определяет суммы кодов на участках между соседними . экстремумами и по сигналам Э передает их в сумматор В интервала, а при одновременном наличии сигнала К и в сумматор 9 кондиции, В течение времени измерения Ц счетчик 10 дискретизаций участка подсчитывает количество просуммированных кодов, передавая его по сигналам Э в сумматор 13 дискретизаций интервала и, кроме того, в зависимости от наличия в момент передачи сигнала к или Н либо в сумматор 15 некой-i диционных дискретизаций, либо в сумматор 14 кондиционных дискретизаций. В момент времени i, отпускает дат- ик 6 начала измерения, погашается одержимое сумматора 7 и счетчика- 10 устанавливается в исходное положение триггер 31 (фиг. 2). Импульс , блока 5 определения экстремумов является командой на деение числа М некондиционных кодов на число N кодов во всем интервале змерения (см. фиг, 4). По результату деления дешифратора 3 в соответствии с заранее выбраным критерием качества вкл.чают одну з ламп блока 17 светофоров. Пусть, например, верхняя лампа блока 17 красного цветт) загорается при реультате деления ,, т.е. при 0% и более некондиционных точек в нтервале. Вторая сверху лампа блока 17 (желтого цвета) загорается при отношении 0,,5, а две нижних лампы (зеленого цвета) загораются при отношениях соответственно 0,,2 ,2. шинист локомотива 18, наблкрая за блоком 17 светофоров, сохраняет скорость движения состава постоянной если горят зеленые , или замедляет состав, если загорается желтая или красная лампа. При загорании одной лишь нижней зеленой лампы скорость состава может быть при необходимости увеличена. При загорании красной лампы, т.е. при большом количестве (свыше 80%) некондиционных кодов в интервале на ключевую схему 20 одновременно вьщается сигнал« по которому для деления блоком 21 выбираются сумма S, накопленная в сумматоре 8 интервала и общее число N дискретизаций, наК(яшенное в сумматоре 13 (вместо Кондиционной суммы 5ц и кондиционно1010 го числа дискретизации во всех других случаях). Поскольку отношение , то схема дешифратора 43 весьма проста и образуется объединением на входах схем совпадений соответствующих вых дов блока 42, а само отношение п/Ц характеризует качество измерения(Очень плохо при и Очень хорошо при ). По команде tf- блок 21 деления Ь м. с /k вычисляет одно Из отношений или 9/N в зависимости от выходного сигнала анализатора 16. Результат деления вносится в регистр 44 и регистрируется устройством 46 цифропечати, а сумматоры В, 9, 13, 14и15 очищаются для последующих измерений импульсом Гаш.2. Таким образом, предлагаемое устройство повышает точность взвешивания грузов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического взвешивания | 1983 |
|
SU1177683A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1972 |
|
SU331258A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ВЗВЕШИВАНИЯ, содержащее весоизмерительные датчики, подключенные через фильтр высоких частот к аналогоцифровому преобразователю, выходы которого подсоединены к блоку определения экстремумов и через сумматор участка измерения к сумматору интервала измерения, счетчик дискретиза ций участка измерения, сумматор дискретизаций интервала и блок деления , подключенный к регистрирующему прибору, отличающееся тем, что, с целью повышения точности путем уменьшения влияния нестационарных помех, в него введены задатчик кондиции измерений со схемой сравнения, сумматоры кондиционных и некондиционных дискретизаций, сумматор кондиции, анализатор качества измерения и ключевая схема, причем информационные входы ключевой схемы подключены к выходам сумматоров интервала измерения и кондиции, сумматора дискретизаций интервала и сумматора кондиционных дискретизаций, а выходы ключевой схемы подключены к входам блока деления, входы анализатора каг чества измерения подключены к выходам сумматора дискретизаций интервала и сумматора некондиционных дискретизаций, а выход - к управляющему входу ключевой схемы, выходы счетчика дискретизаций участка измерений подключены к входам сумматора дискретиза1щй интервала, сумматоров KOHfSfi- ционных и некондиционных дискретизаций и входам схемы сравнения, а входы сумматора кондигдаи подключены к выхосо дам сумматора участка измерения. N4 СО со
.л;
Гош1
Гои
/
-
I35
reu/.i
12
Фиг.З
r-i-i-1
н
п. I I
/7
L -ГГ
N М
А2
/б
к
Ж
«3
dL±Jd-LdJ
2
.
2
Jt
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ взвешивания движущихся объектов | 1978 |
|
SU1002848A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ изготовления роликов и электродов | 1950 |
|
SU91042A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
