112
Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах станков и манипуляторов, а также строительных и дорожных машин.
Целью изобретения является повышение быстродействия и жесткости гидропривода.
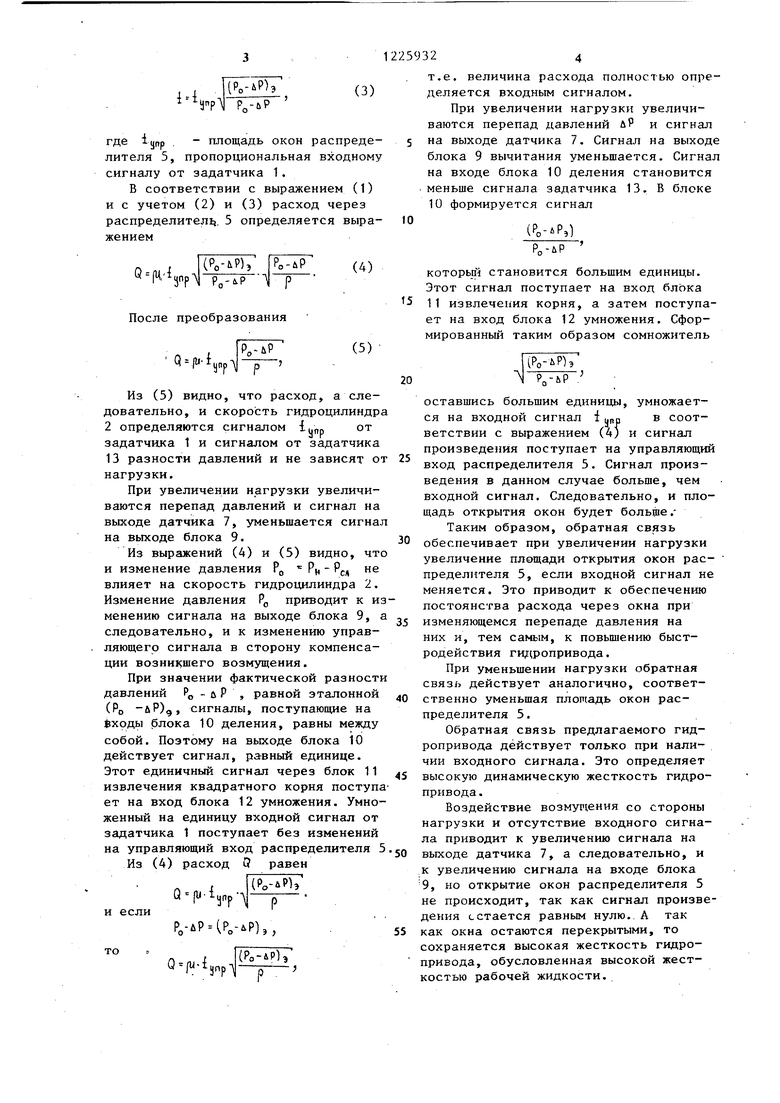
На чертеже изображена схема гидропривода дроссельного регулирования
Гидропривод содержит задатчик 1 входного сигнала, гидроцилиндр 2, к рабочим полостям 3 и 4 которого подключен управляемый распределитель
5, подсоединенный с насосом 6 и ели- BOM, систему формирования сигнала обратной связи по давлению, выполненную в виде датчика 7 перепада давления в полостях 3 и 4 датчика 8 давления
Для обеспечения стабильности скорости при изменении нагрузки при постоянном давлении нагнетания полости 3 и 4 гидроцилиндра 2 сообщены гидролиниями с датчиком 7, который и
25
ное давление нагнетания Рд . В блоке 9 происходит вычитание сигнала, пропорционального абсолютному значению перепада давления иР из сигнала, про порционального эффективному значению давления нагнетания Р , В результате формируется сигнал , пропорциональный разности PQ -йР
30
нагнетания насоса 6 и блока 9 вычита- 20 .меряет перепад давления лР , и дат- ния, а также систему коррекции, вклю- чиком 8, который измеряет эффектив- чающую последовательно соединенные блок 10 деления, блок 11 извлечения квадратного корня, блок 12 умножения, и задатчик 13 разности давления. При этом вход уменьшаемого блока 9 соединен с датчиком 8, вход вычитаемого - с датчиком 7, а выход - с входом делителя блока 10, к входу делимого которого подключен задатчик 13, к выходу - вход блока 11, выход которого подключен к одному из входов блока 12, второй вход которого соединен с задатчиком 1, а выход - с управляющим входом распределителя 5.
Гидропривод дроссельного регулирования работает следующим образом.
о Управляющий сигнал от задатчика 1 через блок 12 поступает на управляющий вход распределителя 5. Изменение управляющего сигнала приводит к соответствующему открытию окон распределителя 5 и пропорциональному изменению скорости гидроцилиндра 2.
Обратная связь по давлению осуществляется следующим образом.
Скорость гидроцилиндра 2 определяется расходом Q через окна распределителя 5
35
40
45
Задатчик 13 разности давлений вырабатывает сигнал, пропорциональный требуемой эталонной равности давлений (Ро лР)- Этот сигнал посту пает в блок 10 деления, в котором происходит его деление на сигнал, пропорциональный фактической разности давлений РО - йР . Частное от деления поступает на вход блока 11, в котором производится извлечение квадратного корня, а полученный сигнал поступает на вход блока 12, в котором производится его умножение на входной сигнал. Полученный сигнал произведения поступает на управляющий вход распределителя 5. Таким образом, площадь открытия окон распределителя 5 пропорциональна сигналу произведения входного сигнала и сигнала обратной связи. Причем сигнал обратной связи сформирован в виде выражения
Р„+ТР
. ;
(1)
де
(ИР Р -Р - и ел
коэффициент расхода; площадь открытия окон распределителя 5; плотность рабочей жидкости;
эффективное давление нагнетания ;
йР
Р.,
-перепад давлении на гидроцилиндре 2;
-давление нагнетания насоса 6;
сд - давление В соответствии с ри одном и том же
слива.
уравнением (1) положении распреа следовательделителя 5 расход Q
но, и скорость гидроцилиндра 2 могут изменяться при изменении перепада давления, например, за счет изменения усилия резания в процессе обработки, изменения веса объекта управления и т.п.
Для обеспечения стабильности скорости при изменении нагрузки при постоянном давлении нагнетания полости 3 и 4 гидроцилиндра 2 сообщены гидролиниями с датчиком 7, который измеряет перепад давления лР , и дат- чиком 8, который измеряет эффектив-
ное давление нагнетания Рд . В блоке 9 происходит вычитание сигнала, пропорционального абсолютному значению перепада давления иР из сигнала, пропорционального эффективному значению давления нагнетания Р , В результате формируется сигнал , пропорциональный разности PQ -йР
меряет перепад давления лР , и дат- чиком 8, который измеряет эффектив-
меряет перепад давления лР , и дат- чиком 8, который измеряет эффектив-
Задатчик 13 разности давлений вырабатывает сигнал, пропорциональный требуемой эталонной равности давлений (Ро лР)- Этот сигнал поступает в блок 10 деления, в котором происходит его деление на сигнал, пропорциональный фактической разности давлений РО - йР . Частное от деления поступает на вход блока 11, в котором производится извлечение квадратного корня, а полученный сигнал поступает на вход блока 12, в котором производится его умножение на входной сигнал. Полученный сигнал произведения поступает на управляющий вход распределителя 5. Таким образом, площадь открытия окон распределителя 5 пропорциональна сигналу произведения входного сигнала и сигнала обратной связи. Причем сигнал обратной связи сформирован в виде выражения
J
():
(2)
Р„-йР
Открытие i определяется
окон распределителя следующим выражением
i-i
(Po-iP);
УРЧ РО-ЬР
где lynp . площадь окон распределителя 5, пропорциональная входному сигналу от задатчика 1.
В соответствии с выражением (1) и с учетом (2) и (3) расход через распределител }. 5 определяется выражением
Q fM/icjnp
I
(
Po-iP
После преобразования
q-(.
Из (5) видно, что расход, а следовательно, и скорость гидроцилиндра 2 определяются сигналом i.„p от задатчика 1 и сигналом от задатчика 13 разности давлений и не зависят от нагрузки.
При увеличении нагрузки увеличиваются перепад давлений и сигнал на выходе датчика 7, уменьшается сигнал на выходе блока 9.
Из выражений (4) и (5) видно, что и изменение давления Р Рц - Р не влияет на скорость гидроцилиндра 2. Изменение давления Р„ приводит к изменению сигнала на выходе блока 9, а следовательно, и к изменению управляющего сигнала в сторону компенсации возникшего возмущения.
При значении фактической разности давлений РО - и Р , равной эталонной (РО -uP)q, сигналы, поступающие на ходы блока 10 деления, равны между собой. Поэтому на выходе блока 10 действует сигнал, ра-вный единице. Этот единичный сигнал через блок 11 извлечения квадратного корня поступает на вход блока 12 умножения. Умноженный на единицу входной сигнал от задатчика 1 поступает без изменений на управляющий вход распределителя 5.
Из (4) расход 5 равен
(Ра-лРЬ
И если
Q fu-i,np р Р„-дР (Р,-.РЬ,
то
о-ш-f
Р .
т.е. величина расхода полностью определяется входным сигналом.
При увеличении нагрузки увеличиваются перепад давлений йР и сигнал 5 на выходе датчика 7. Сигнал на выходе блока 9 вычитания уменьшается. Сигнал на входе блока 10 деления становится меньше сигнала задатчика 13. В блоке 10 формируется сигнал
to
() PO-UP
20
KOTOpbtfi становится большим единицы. Этот сигнал поступает на вход блока 5 11 извлечения корня, а затем поступает на вход блока 12 умножения. Сфор- мированньш таким образом сомножитель
(Рр-ЬР Э РО-ЬР
5
0
5
оставшись большим единицы, умножается на входной сигнал f (.„п в соответствии с выражением (4) и сигнал произведения поступает на управляющий вход распределителя 5. Сигнал произведения в данном случае больше, чем входной сигнал. Следовательно, и площадь открытия окон будет больше .Таким образом, обратная связь 0 обеспечивает при увеличении нагрузки увеличение площади открытия окон распределителя 5, если входной сигнал не меняется. Это приводит к обеспечению постоянства расхода через окна при 5 изменяющемся перепаде давления на них и, тем самым, к повьш1ению быстродействия гидропривода.
При уменьшении нагрузки обратная связь действует аналогично, соответственно уменьшая площадь окон распределителя 5.
Обратная связь предлагаемого гидропривода действует только при наличии входного сигнала. Это определяет высокую динамическую жесткость гидропривода.
Воздействие возмущения со стороны нагрузки и отсутствие входного сигнала приводит к увеличению сигнала на выходе датчика 7, а следовательно, и к увеличению сигнала на входе блока 9, но открытие окон распределителя 5 не происходит, так как сигнал произведения сстается равным нулю.. А так 5 как окна остаются перекрытыми, то
сохраняется высокая жесткость гидро- привода, обусловленная высокой жесткостью рабочей жидкости.
0
При малых входных сигналах жесткость также будет высока. При больших входных сигналах жесткость по отношению к возмущенупо высока, так как обратная связь компенсирует действие возмущения.
При применении привода в следящей системе при изменении нагрузки открытие окон распределителя 5 соответствующим образом изменяется. При этом не требуется измерения рассогласования между входным и выходным сигналаРедактор Г. Волкова
Составитель С. Рождественский
Техред и.Верес Корректор М. Шароши
Заказ 2108/22Тираж 610Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ми, т.е. изменения ошибки слежения. Сигнал обратной связи компенсирует изменение нагрузки умножением на ту же ошибку слеже 1ия.
Использование предлагаемого изобретения -в гидросистемах станков, манипуляторов, строительных и дорожных машин позволяет повысить их быстродействие и жесткость по отношению и переменным нагрузкам и, тем самым, повысить эффективность их использования .
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1983 |
|
SU1135929A1 |
| Способ защиты компрессора от помпажа и устройство для его осуществления | 1986 |
|
SU1377461A1 |
| Способ защиты компрессора от помпажа и устройство для его осуществления | 1989 |
|
SU1694991A1 |
| Устройство для гидроизгиба рабочих валков непрерывного прокатного стана | 1986 |
|
SU1359037A1 |
| Способ измерения массового расхода газожидкостного потока и устройство для его осуществления | 1983 |
|
SU1272117A1 |
| Устройство для управления нагрузкой трансформаторной подстанции | 1987 |
|
SU1473008A1 |
| Способ защиты от помпажа компрессора и устройство для его осуществления | 1988 |
|
SU1643800A1 |
| Способ защиты компрессора от помпажа и устройство для его осуществления | 1988 |
|
SU1590676A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Чупраков Ю.И | |||
| Гидропривод и средства гидроавтоматики | |||
| М.: Машиностроение, 1975, с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Гидравлический следящий привод | 1983 |
|
SU1135929A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
