оо сл со to
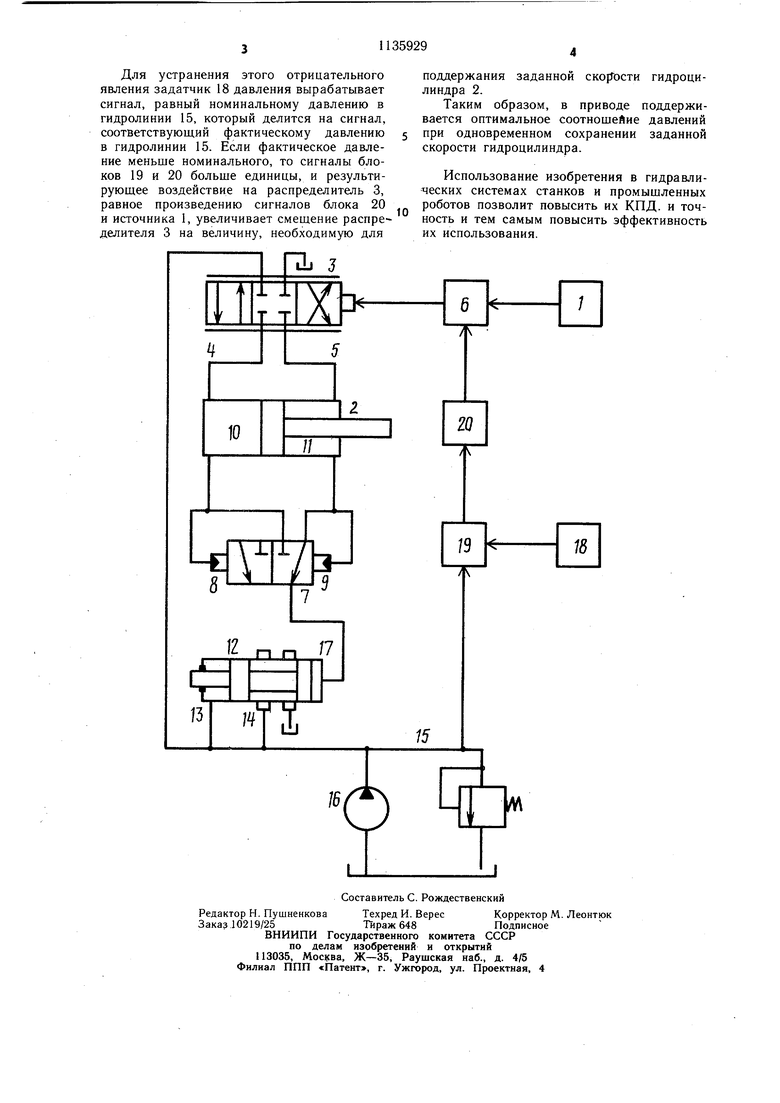
со Изобретение относится к гидроавтоматике и может быть использовано в гидравлических системах станков и промышленных роботов. Известен гидравлический следящий привод, содержащий источник входного сигнала исполнительный гидроцилиндр, следящий распределитель, подключенный гидролиниями к гидроцилиндру и связанный с источником входного сигнала, а также устройство обратной связи по нагрузке 1. Недостатком данного привода является низкий КПД вследствие больших потерь мощности при малых нагрузках. Известен также гидравлический следящий привод, содержащий источник входного сигнала, исполнительный гидроцилиндр, следящий распределитель, подключенный гидролиниями к гидроцилиндру и связанный через формирователь с истоЧником входного, сигнала, а также устройство обратной связи по нагрузке, включающее избирательный распределитель с камерами управления, подключенными к полостям гидроцилиндра, и управляемый переливной клапан, одна из камер управления которого и рабочая гидролиния подключены к напорной гидролинии источника рабочей жидкости, а вторая камера управления - к выходу избирательного распределителя 2. Недостатками известного привода являются низкие КПД и точность снижения скорости перемещения гидроцилиндра при увеличении нагрузки. Целью изобретения является повышение КПД и точности устройства. Указанная цель достигается тем, что в гидравлическом следящем привода, содержащем источник входного сигнала, исполнительный гидроцилиндр, следящий распределитель, подключенный гидролиниями к гидроцилиндру и связанный через формирователь с источником входного сигнала, а также устройство обратной связи по нагрузке, имеющее избирательный распределитель с камерами управления, подключенными к полостям гидроцилиндра, и управляемый переливной клапан, одна из камер управления которого и рабочая гидролиния подключены к напорной гидролинии источника рабочей жидкости, а другая камера управленияк выходу избирательного распределителя, устройство обратной связи снабжено задатчиком номинального давления и последовательно соединенными блоком деления и блоком извлечения квадратного корня, а формирователь выполнен в виде блока умножения, причем вход делителя блока деления подключен к напорной гидролинии, вход делимого - к задатчику давления, а блок умножения одним из входов подключен к выходу блока извлечения квадратного корня. На чертеже изображена схема гидравлического следящего привода. Привод содержит источник 1 входного сигнала, исполнительный гидроцилиндр 2, следящий распределитель 3, подключенный гидролиниями 4 и 5 к гидроцилиндру 2 и связанный через формирователь, выполненный в виде блока 6 умножения, с источником 1 входного сигнала, а также устройство обратной связи по нагрузке, включающее избирательный распределитель 7 с камерами 8 и 9 управления, подключенными к полостям 10 и 11 гидроцилиндра 2, управляемый переливной клапан 12, камера 13 управления и рабочая гидролиния 14 которого подключены к напорной гидролинии 15 источника 16 рабочей жидкости, а камера 17 клапана 12 подключена к выходу распределителя 7, задатчик 18 номинального давления и последовательно соединенные блок 19 деления и блок 20 извлечения квадратного корня, причем вход делителя блока 19 подключен к гидролинии 15, вход делимого --- к задатчику 18, а блок 6 одним из входов подключен к выходу блока 20. Соотношение эффективных площадей камер 13 и 17 клапана 12 целесообразно выполнить как 5:6 соответственно для обеспечения оптимального перепада давлений в полостях 10 и 11 гидроцилиндра 2. Гидравлический следящий привод работает следующим образом. Входной сигнал от источника 1 поступает на распределитель 3. Изменение открытия щелей распределителя 3 приводит к изменению скорости гидроцилиндра 2. При этом с помощью устройства обратной связи поддерживается оптимальное соотношение давлений в приводе, когда перепад давлений в полостях 10 и 11 составляет 2/3 от давления в напорной гидролинии 15. Для этого распределитель 7 сообщает с камерой 17 клапана 12 ту полость гидроцилиндра 2, в которой давление больше. В случае увеличения перепада давлений по сравнению с оптимальным клапан 12 уменьшает слив рабочей жидкости из гидролинии 15 через гидролинию 14, а в случае уменьшения перепэда давлений - увеличивает слив из гидролинии 15. В последнем случае уменьшается расход через распределитель 3, и перепад давлений изменяется до восстановления оптимального соотношения с давлением в напорной гидролинии 15. Однако уменьшение расхода через распределитель 3 направлено на снижение скорости гидроцилиндра 2 и на увеличение непроизводительного расхода из гидролинии 15 на слив.
Для устранения этого отрицательного явления задатчик 18 давления вырабатывает сигнал, равный номинальному давлению в гидролинии 15, который делится на сигнал, соответствующий фактическому давлению в гидролинии 15. Если фактическое давление меньше номинального, то сигналы блоков 19 и 20 больше единицы, и результирующее воздействие на распределитель 3, равное произведению сигналов блока 20 и источника 1, увеличивает смещение распределителя 3 на величину, необходимую для
поддержания заданной скорости гидроцилиндра 2.
Таким образом, в приводе поддерживается оптимальное соотношейие давлений при одновременном сохранении заданной скорости гидроцилиндра.
Использование изобретения в гидравлических системах станков и промыщленных роботов позволит повысить их КПД. и точность и тем самым повысить эффективность их использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| Гидропривод дроссельного регулирования | 1984 |
|
SU1225932A1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
| Стенд для испытания гидравлических следящих систем прямолинейного движения | 1981 |
|
SU973962A1 |
| Гидравлическая система комбайна | 1989 |
|
SU1667692A2 |
| Электрогидравлическая система совмещенного управления строительной машиной | 1987 |
|
SU1502728A1 |
| Гидросистема мобильной машины | 1991 |
|
SU1810615A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
ГИДРАВЛИЧПОгч - .ЛЕДЯЩИЙ ПРИВОД, содер/ jiUHii источник входного сигнала, иси ылитсльный гидроцилинлр. следящий распределитель, подключепп; гидролиниями к гидроцилиндру и связанный через формировате.ль с источником входного сигнала, а также устройство обратной связи по нагрузке, имеющее избирательный распределитель с камерами управления, подключенными к полостям гидроцилиндра, и управляемый переливной клапан, одна из камер управления которого и рабочая гидролиния подключены к напорной гидролинии источника рабочей жидкости, а другая камера управления - к выходу избирательного распределителя, отличаюшийся тем, что, с целью повышения его КГ1Д и точности, устройство обратной связи по нагрузке снабжено задатчиком номинального давления и последовательно соединенными блоком деления и блоком извлечения квадратного корня, а формирователь выполнен в виде блока умножения, причем вход делителя блока деления подключен к на(О порной гидролинии, вход.делимого - к засл датчику давления, а блок умножения одним из входов подключен к выходу блока извлечения квадратного Корня.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чупраков Ю | |||
| И | |||
| Гидропривод и средства гидроавтоматики, М., «Машиностроение, 1979, с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тумаркин М | |||
| Б, Гидравлические следящие приводы | |||
| М | |||
| «Машиногтооение, 1966, с | |||
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
