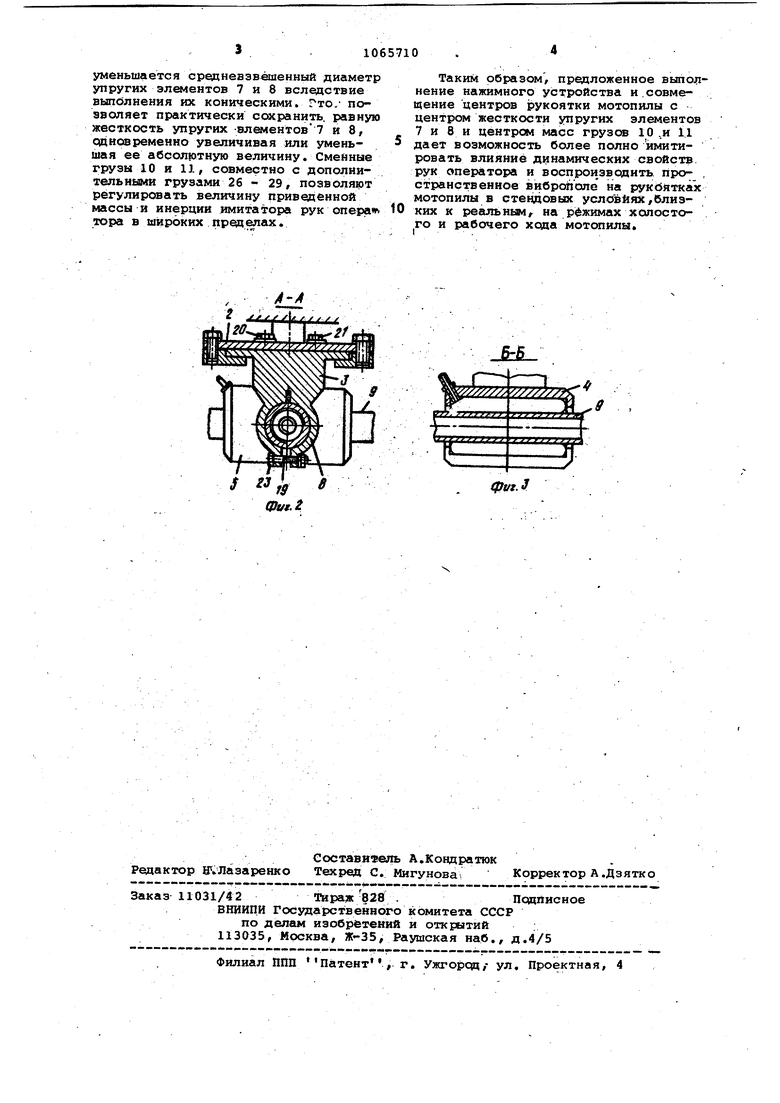
Изобретение относится к средствам вибрационн,ых испытаний механизирова ных инструментов и может найти применение на предприятиях, выпускающих ручной механизированный инструмент. По основному авт.св. В 868402 . известно нажимное устройство к стенд для испытания механизированных инструментов, содержащее основание, захваты для рукояток инструмента, каж дый изкоторых выполнен в виде двух призм, между которыми расположена эластичная камера, связанная с источ ником питания 13. Однако это устройство не обеспечи вает необходимых условий испытаний, имитирующих динамические свойства рук оператора, близких к эаксплуатационным. Целью изобретения является обеспечение более полной имитации динами ческих свойств рук оператора и расг ширение дапазона их регулировки. Цель достигается тем, что основание снабжено опорными кронштейнами, концы которых связаны с захватами 4ля рукояток посредством упругих эле ментов, каждый из которых выполнен в виде конической, расположенной большим основанием к захвату втулки, имегацей винтовой сквозной паз и цилиндрическую внутреннюю поверхность с резьбой, шаг .-которой меньше шага аза втулки, а. устройство снабжено имек1цими резьбу стержнями, с гайкги 1И на одних концах и сменными грузами на других, причем гайки подвижно закреплены во втулках, а один из опорных кронштейнов выполнен подвижным относительно основания. Кроме того, устройство снабжена .дбполнительными грузами, установленными на сменных грузах с возможностью перемоцения в направлении, перпендикулярном стержням. На фиг. 1 изображено нажимное устройство, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-В на фиг. 1. Нажимное устройство к стенду для испытания механизированных инструмен тов содержит неподвижное основание 1, опорные кронштейны 2 и 3, захваты для рукояток, казкдый из которых BJ полнен в виде двух призм 4 я 5, между КОТО1Ж1МИ расположена эластичная камера 6, связанная с источнике питания (на рисунке не показан), упругие элементы 7 и 8, установленные между опорными кронштейнами 2 и 3 и призмами 4 и 5 перпевдикулярно оси рукоятки 9 коиопилы, и сменные грузы 10 и 11, связанные призмами 4 и 5. Упругие эйементы 7 и 8 выполнены в виде дв-ух конических, обращенных бсшьшими основаниями к призмам 4 и 5 втулои, имекщих сквозные винтовые пазы 12 и 13, внутренняя поверхность каждой втулки выполнена цилиндрической и имеет резьбу 14 и 15, шаг ко . горой меньше шага пазов 12 и 13- втулок и сопрягается с гайками 16 и 17, установленными на подвижно закрепленных в призмах 4 и 5 стержнях 18 и 19, на концах которьк закреплены сменные грузы 10 и 11. Один из опорных кронштейнов.3 выполнен подвижным относительно основания 1 и жестко связывается с другим кронштейном винтами 20 и 21. Упругие элементы 7 и 8 меньшими основаниямизакрепляются; в отверстиях опорных кронштейнов 2 и 3 и фиксируются винтами 22 и 23, а большими основаниями - в призмах 4 и 5 и фиксируются винтами 24 и 25. Дополнительные грузы 26 - 29 устанавливаются на сменных грузах J.O и 11 с возможностью перемещения по резьбе в направлениях, перпендикулярных стержням 18 и 19, закрепленных гайками 30 - 33. Нажимное устройство работает следукддим образом. Ослабляют винты 20 и 21 и включают источник давления, под действием которого эластичная камера 6, расправляясь, перемацает подвижный кронштейн 3 и связанные с ним упругий элемент 8, призму 5 со стержнем 19, сменньм грузом 11 и дополнительйыми грузами 28 и 29 вправо. Рукоятка 9 мотопилы устанавливается в призме 4. Давление в камере 6 сбрасьшается, подвижный кронштейн 3 и связанные с .ним упругий элемент 8, призма 5 со стержнем 19, сменным грузом 11 и. лополнительньми грузами 28 и 29 перемещаются влево к призме 4 и фиксируются винтами 20 и 21. Давление в камере 6 увеличивается, что позволяет имитировать усилие охвата рукоятки 9 руками оператора. Давление в камере 6 измеряется при помоци манометра и регулируется программным устройством (не показано) в преиепах 50 т 500 Р. Динамические свойства рук оператора имитируются путем изменения жесткости упругих элементов и инерционных характеристик захватов. При работе мотопилы возникающие пространственные перемещения захватов отнсюительно неполвижного основания 1 в, деформацию витков упругих элементов, величины которых зависят от количества рабочих витков. При вращении стержней 18 и 19 гайки 16 и 17, взаимодействуя с витками резьбы 14 и 15 упругих элементов 7 и 8, изменяют количество рабочих витков упругих элаиентов 7 и 8,и, тем самым, их жесткость. При перемещении гаек 16 и 17 по надравлению к меньшим основаниям упругих элементов 7 и 8 одровремеино
уменьшается срещневэвешенный диаметр упругих элаиентов 7 и 8 вследствие выполнения юс коническими. Гто/ позволяет практически с еж ранить, равную жесткость упругих -влементов 7 и 8, одновременно увеличивая или уменьшая ее абсолютную величину. Смейные грузы 10 и 11, совместно с дополнительными грузами 26 - 29, позволяют регулировать величину приведенной массы и инерции имитатора рук опера«п тора в широких пределах.
Таким образом, предложенное выполнение нажимного устройства и.совме(цение центров рукоятки мотопилы с центром жесткости упругих элементов 7 и 8 и центром масс грузсш 10.и 11 дает возможность более полно имитировать влияние динамических свойств рук оператора и воспрои зводнть про- , странственное вибро оле на рукбйтках мотопилы в стендовых условиях/близких к регшьным, на режимах холостого и рабочего хода мотопилы.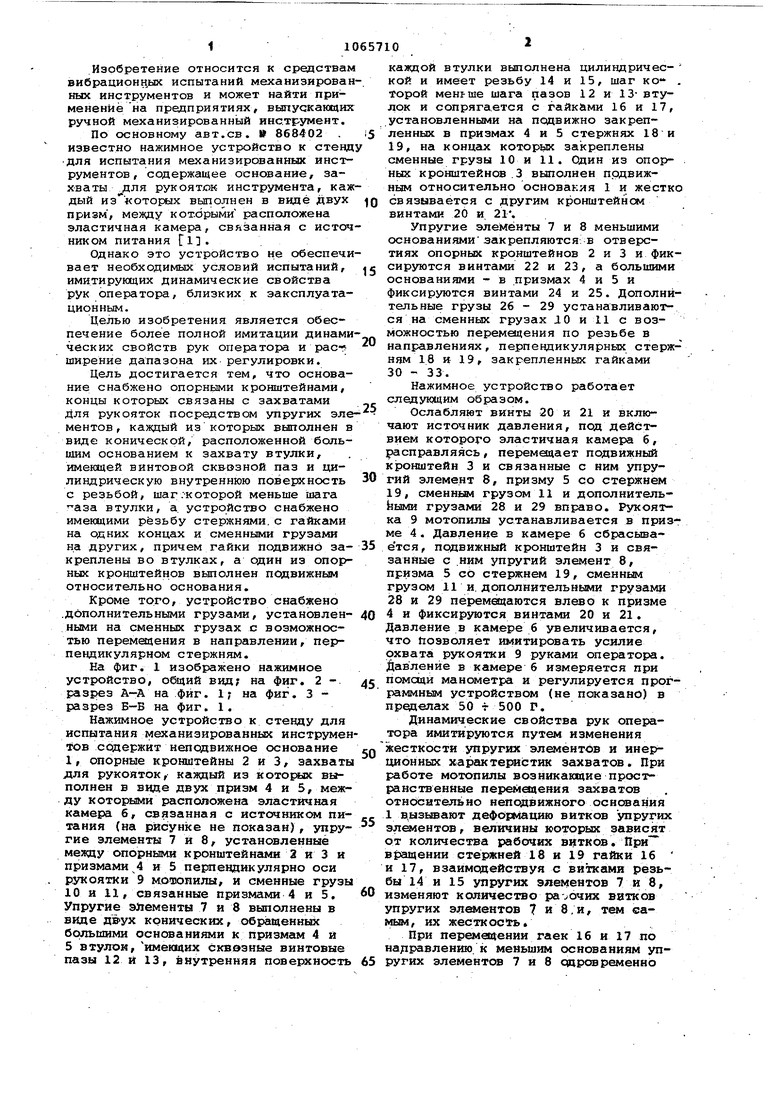
| название | год | авторы | номер документа |
|---|---|---|---|
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1977 |
|
SU648864A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1980 |
|
SU868402A1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1977 |
|
SU649973A1 |
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Имитатор динамических свойств руки оператора к стенду для испытаний мотопил | 1988 |
|
SU1569648A1 |
| Манипулятор для стенда испытаний мотоинструментов | 1976 |
|
SU595648A1 |
| Имитатор входного механического импеданса руки человека для испытаний механизированного инструмента | 1975 |
|
SU530215A1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
1. НАЖИМНОЕ УСТРОЙСТВ К СТЕВДУ ДЛЯ ИСПЫТАНИЯ МЕХАНИЗИРОВАННЫХ ИНСТРУМЕНТОВ по авт.св. 868402, ОТ л ича ющ ееС я тем, что, с целью обеспечения более полной имитации динамических свойств рук оператора, основание снабжено ОПОЕННЫМИ кронштейнами, концы которых связаны с захватами для рукояток посредством упругих элементов, казцдый из которых выполнен в виде конической, расположенной большим основа-нием к захвату втулки, имеющей винтовой сквоз|Ной паз и цилиндрическую внутреннюю поверхность с резьбой, шаг которой меньше шага паза втулки, а устройство снабжено имеющими резьбу стержнями с гайками на одних концах и сменшлми грузами на других, причем гайки подвижно закреплены во втулках, а сздин из опорных кронштейнов вьвюлнен подвижным относительно основания. 2. Устройство по п. 1, отличающееся тем, что, с целью расширения диапазона регулировки динамических свойств рук оператора, , оно снабжено дополнительными грузами, установленнь5и1И на сменных грузах с W возможностью перем цени.я в направлении, перпендикулярном стержням.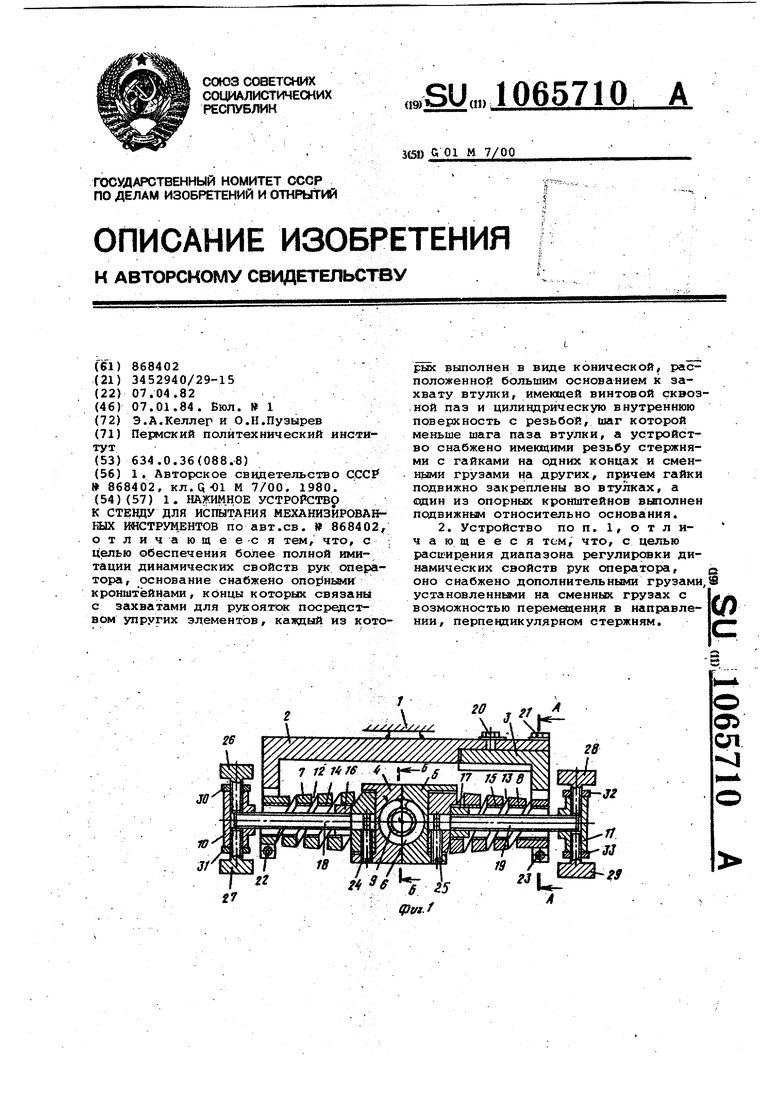
,М
фуг. У
| Нажимное устройство к стенду для испытания механизированных инструментов | 1980 |
|
SU868402A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
