Изоберетсниё относится к измерительной технике и может быть использовано при экспериментальных исследованиях и в системах управления частотно-регулируемыми синхронными двигателями -и вентильными двигателями на их основе.
Целью изобретения является расширение функциональных возможностей и повышение точности измерений за счет того, что цифровой блок задершси осуществляет смещение фазы импульсов датчика положения непосредственно в градусной мере, т.е. независимо от частоты вращения, что позволяет проводить коррекцию датчика однократно, при установке и для любого направления вращения и режима работы, а наличие связи регистра с блоком синхронизации и блока определения знака угла обеспечивают регистрацию и запоминание на каждом интервале дискретности устройства правильного значения внутреннего угла машины при любом режиме работы, что позволяет использо- ,вать предлагаемое устройство в систе мах автоматического управления электроприводами.
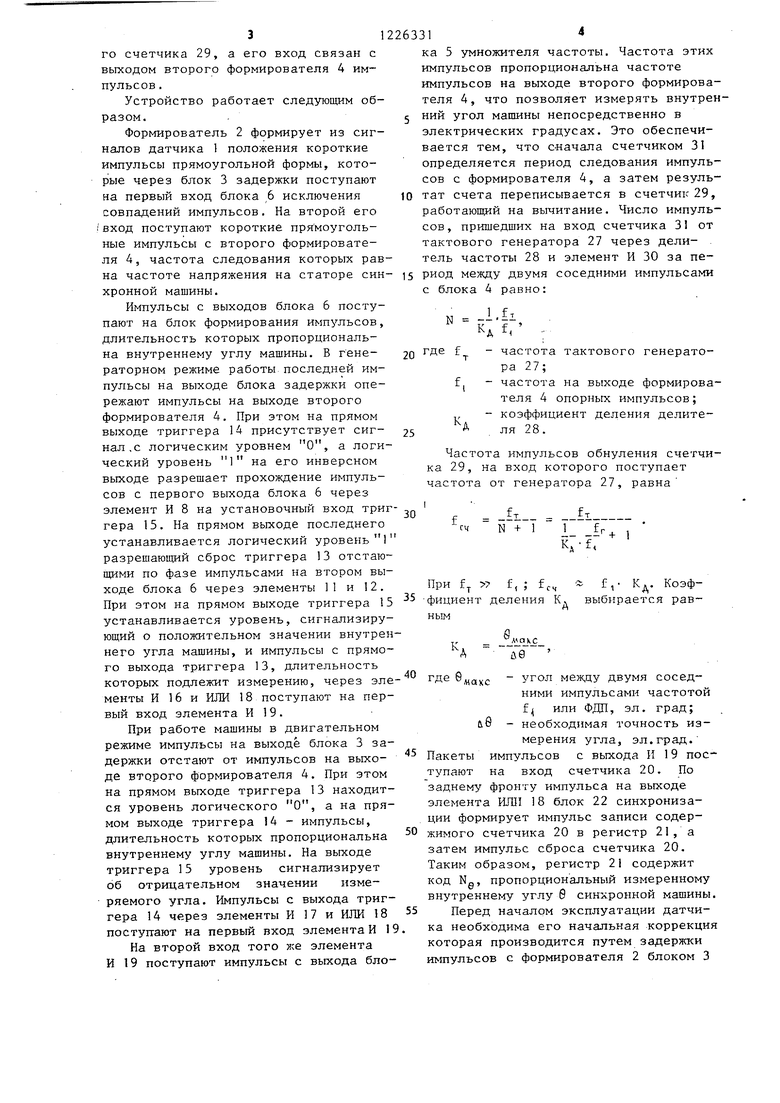
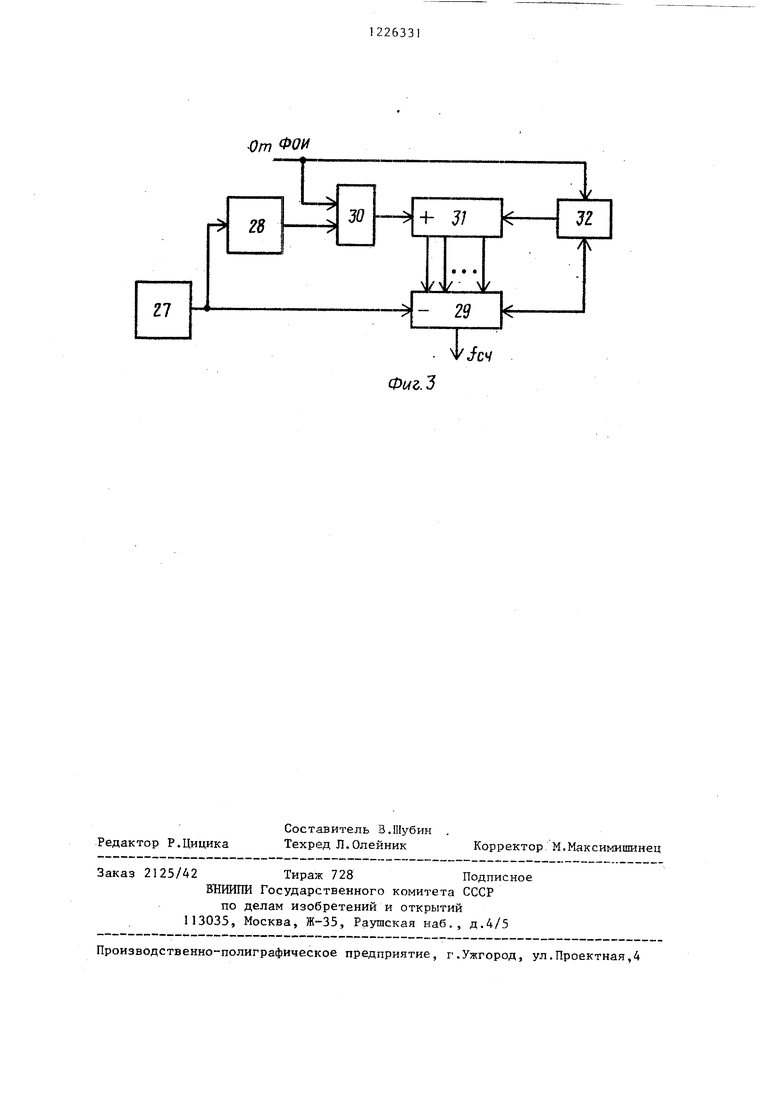
На фиг. 1 приведена схема устройсва; на фиг. 2 - пример реализации цифрового блока задержки; на фиг. 3 пример реализации умножителя частоты
Схема устройства для измерения внутреннего угла синхронной машины содержит датчик 1 положения, выходом соединены с первым формирователем (ФДП) 2, а его выход связан с первым входом блока 3 задержки. Второй формирователь 4 выходом соединен с входо умножителя 5 частоты. Выход блока за держки связан с первым входом блока 6 исключения совпадений, второй вход которого соединен с выходом умножителя 5 частоты. Одновременно второй вход блока 3 задержки связан с в ьгходом (f умножителя частоты, на третий вход которого подведен внешний сигнал управления, а на четвертые входы N подается код - эквивалент величине задержки. Выходы блока 6 исключения совпадений соединены с входами блока 7 определения знака угла, который содержит первый 8, второй 9, третий 10
Умножитель 5 частоты реализован на принцип управляемого деления тактовой частоты и содержит (фиг.З) генератор 27 тактовых импульсов, выход которого соединен с входом делителя 28 частоты и с вычитаюш тм счетным входом реверсивного счетчика 29, выход делителя частоты соединен с первым входом десятого элемента И 30, на второй вход которого подключен выход второго формирователя 4, его выход связан с суммирующим входом счетчика 31, выходы которого соедине ны с входами параллельной записи реверсивного счетчика 29, а установочи четвертьш 11 элементы И, первый элемент ИЛИ 12, первый 13 и второй 4 RS- 35 ный вход соединен с выходом блока 32 .триггеры, а выходы указанного блока синхронизации. Кроме того, выход соединены с входами третьего ЕЗ-триг блока синхронизации соединен с вхо- гера 15 и с первыми входами пятого 16 дом запись предустановки реверсивноto
15
20
25
31)
2Ь:3312
и шестого 1/ элементов И, на вторые йходы которых подключены выход третьего RS-триггера 15, Выходы пятого и шестого элементов И через второй эле- 5 мент И.Ш1 18 соединены с первым входом седьмого элемента И 19, выход которого связан со счетным входом счетчика 20, выходами соединенного с входами регистра 21. Кроме того, на второй вход элемента И 19 подключен выход умножителя частоты, а выход второго элемента ИЛИ 18 соединен с входом блока 22 синхронизации, выходы которого связаны с R-входом счетчика и входом Запись регистра 21. Выход регистра является выходом устройства.
Цифровой блок 3 задержки (фиг.2) реализуется на реверсивном счетчике 23, на входы записи Ыд которого подается код числа, эквивалентного требуемому углу сдвига для направления вращения двигателя, принятого условно за прямое, а на вход синхронизации подключен выход первого формирователя 2. Выход умножителя частоты fj,(j соединен с первыми входами восьмс - го 24 и девятого 25 элементов И, причем выход восьмого элемента И соединен с вычитающим входом реверсивного счетчика 23, а выход девятого элемента И 25 связан с суммирующим счетным входом () реверсивного счетчика 23, Кроме того, сигнал Упр. направления вращения от системы управления приводом подведен к второму входу восьмого элемента И 24 и к входу третьего элемента ИЛИ 26, инверсный выход которого связан с вторым входом девятого элемента И 25,
30
35
Умножитель 5 частоты реализован на принцип управляемого деления тактовой частоты и содержит (фиг.З) генератор 27 тактовых импульсов, выход которого соединен с входом делителя 28 частоты и с вычитаюш тм счетным входом реверсивного счетчика 29, выход делителя частоты соединен с первым входом десятого элемента И 30, на второй вход которого подключен выход второго формирователя 4, его выход связан с суммирующим входом счетчика 31, выходы которого соединены с входами параллельной записи реверсивного счетчика 29, а установочный вход соединен с выходом блока 32 синхронизации. Кроме того, выход блока синхронизации соединен с вхо- дом запись предустановки реверсивного счетчика 29, а его вход связан с выходом второго формирователя 4 импульсов .
Устройство работает следующим образом.
Формирователь 2 формирует из сигналов датчика 1 положения короткие импульсы прямоугольной формы, которые через блок 3 задержки поступают на первый вход блока 6 исключения совпадений импульсов, На второй его i вход поступают короткие прямоугольные импульсы с второго формирователя 4, частота следования которых равна частоте напряжения на статоре синхронной машины.
Импульсы с выходов блока 6 поступают на блок формирования импульсов, длительность которых пропорциональна внутреннему углу машины. В генераторном режиме работы последней импульсы на выходе блока задержки опережают импульсы на выходе второго формирователя 4. При этом на прямом выходе триггера 14 присутствует сигнал, с логическим уровнем О, а логический уровень 1 на его инверсном выходе разрешает прохождение импульсов с первого выхода блока 6 через элемент И 8 на установочный вход триггера 15. На прямом выходе последнего устанавливается логический уровень разрешающий сброс триггера 13 отстающими по фазе импульсами на втором выходе блока 6 через элементы 11 и 12. При этом на прямом выходе триггера 15 устанавливается уровень, сигнализирующий о положительном значении внутреннего угла машины, и импульсы с прямого выхода триггера 13, длительность которых подлежит измерению, через элементы И 16 и ИЛИ 18 поступают на первый вход элемента И 19.
При работе машины в двигательном режиме импульсы на выходе блока 3 задержки отстают от импульсов на выходе второго формирователя 4. При этом на прямом выходе триггера 13 находится уровень логического О, а на прямом выходе триггера 14 - импульсы, длительность которых пропорциональна внутреннему углу машины. На выходе триггера 15 уровень сигнализирует об отрицательном значении измеряемого угла. Импульсы с выхода триггера 14 через элементы И 17 и ИЛИ 18 поступают на первый вход элементам 1
На второй вход того же элемента И 19 поступают импульсы с выхода бло
ка 5 умножителя частоты. Частота этих импульсов пропорциональна частоте импульсов на выходе второго формирователя 4, что позволяет измерять внутренний угол машины непосредственно в электрических градусах. Это обеспечивается тем, что сначала счетчиком 31 определяется период следования импульсов с формирователя 4, а затем результат счета переписывается в счетчик 29, работающий на вычитание. Число импульсов, пришедших на вход счетчика 31 от тактового генератора 27 через делитель частоты 28 и элемент И 30 за период между двумя соседними импульсами с блока 4 равно:
N -
К, f ..
где f.
К,
-частота тактового генератора 27;
-частота на выходе формирователя 4 опорных импульсов;
-коэффициент деления делителя 28.
Частота импульсов обнуления счетчика 29, на вход которого поступает частота от генератора 27, равна
f
Чч
т
N + 1
fr
1- -. 1
KA f
При f 7 f, ; f
f,
Кд. Коэф 5 -фициент деления К. выбирается равным
К,
где 6
макс
u9
- угол ме)к,цу двумя соседними импульсами частотой
u8 f или ФДП, эл. град;
необходимая точность измерения угла, эл.град. Пакеты импульсов с выхода И 19 пос тупают на вход счетчика 20, По заднему фронту импульса на выходе элемента ИЛ1 18 блок 22 синхронизации формирует импульс записи содержимого счетчика 20 в регистр 21, а затем импульс сброса счетчика 20. Таким образом, регистр 21 содержит код Ng, пропорциональный измеренному внутренне углу б синхронной машины. Перед началом эксплуатации датчика необходима его начальная коррекция которая производится путем задершси импульсов с формирователя 2 блоком 3
5
, задаваемую ко- с ПОМОП1ЫО набора
на величину угла U дом N. , например
тумблеров или с другого программоносителя, При. Njj задает величи ну задержки непосредственно в электрических градусах.
Реверсивный счетчик 23 имеет емкость, равную Кд . При вращении двигателя вперед, на управляющем входе блока 3 (входе инвертора РШИ 26) присутствует уровень логической 1, и счетные импульсы с выхода реверсивного счетчика 29 поступают на вычитающий вход реверсивного счетчика 23. На выходе этого счетчика 23 появляет ся импульс обнуления при поступлении на его вычитающий вход N счетных импульсов, т.е. через время
, NA NU
UL - JT Y , f
ЕСЧ J, 1
Угол коррекции Д f t uN/Кд таким образом не зависит от частоты f, . При изменении направления вращения на обратное на управляющий вход блока 3 подается уровень логического О и счетные импульсы с реверсивного счетчика 29 поступают через элемент И 25 на суммирующий вход счетчика 23,
чем достигается неизменность фазы им-зо единены с выходами третьего и четверпульсов на выходе блока 3 при реверсе
машины.
Устройство позволяет без вмешательства в монтаж выполнять настройку для двигателей любой полюсности 35 и использовать датчик положения с больщим количеством импульсов за один оборот диска, что уменьшает интервалы дискре1 ности и время измерений, Здесь отстройка нулевого угла осу- 40 ш.ествляется изменением кода ка входе схемы задержки при произвольной установке диска датчика. Все это сокращает время подготовки устройства к работе и не требует переналадки при 45 изменении ражимов работы исследуемой И.ПИ управляемой машины. Совокупность этих свойств дает ощутимый технико- экономический эффект, величина кототого элементов И, инверсный выход первого RS-триггера соединен с вторым входом второго элемента И, а его прямой выход связан с вторым входом четвертого элемента И, инверсный выход второго RS-триггера соединен с вторым входом первого элемента И, а его прямой выход - с вторым входом третьего элемента И, первый -выход блока определения знака угла соединен с выходом первого элемента И и S-входом введенного третьего RS-триггера, а второй его выход - с выходом второго элемента И и R-входом - ретьего RS- триггера, прямой выход которого соединен с первым входом пятого введенного элемента И, на второй вход которого подключен прямой выход первого RS-триггера, а инверсный выход третьерого зависит от конкретной установки, 50 го RS-триггера соединен с первьм входом шестого введегшого элемента И, к второму входу которого подключен прямой выход второго RS-триггера, выходы пятого и шестого элементов И 55 через второй введенный элемент ИЖ соединены с первым входом седьмого введенного элемента И и с входом блока синхронизации, причем выход умгде используется предлагаемое устройство.
Формула изобретения
Устройство для измерения внутреннего угла синхронной машины, содержащее счетчик и последовательно соеди15
10
ненные датчик положения, первый формирователь,, блок задержки, а также второй формирователь, вход которого соединен с источником сигнала опорной частоты, а выход с входом умножителя частоты, о т ли ч ающе е с я тем, что, с целью расширения функциональных возможностей и повьпиения точности измерений в него введены блок исключения совпадений, первый вход которого соединен с выходом блока задержки, а второй его вход - с выходом второго формирователя импульсов, блок определения-знака угла, первый и , второй ВХОДЕ) которого соединены соответственно с выходами блока исключения совпадений, содержащий четыре элемента И, элемент ИЛИ, два КЗ-триггера, блок синхронизации, и регистр,
причем первый вход блока исключения совпадений соединен с первыми входами первого и третьего элементов И, а второй выход блока исключения совпадения связан с первыми входами второго и четвертого элементов И, выходы первого и второго элементов И соединены с S-входами первого и второго RS-триггеров соответственно, R-входы которых через первый элемент И.ПИ со20
25
того элементов И, инверсный выход первого RS-триггера соединен с вторым входом второго элемента И, а его прямой выход связан с вторым входом четвертого элемента И, инверсный выход второго RS-триггера соединен с вторым входом первого элемента И, а его прямой выход - с вторым входом третьего элемента И, первый -выход блока определения знака угла соединен с выходом первого элемента И и S-входом введенного третьего RS-триггера, а второй его выход - с выходом второго элемента И и R-входом - ретьего RS- триггера, прямой выход которого соединен с первым входом пятого введенного элемента И, на второй вход которого подключен прямой выход первого RS-триггера, а инверсный выход третье7
ножнтеля частоты соединен с вторым входом седьмого элемента И с вторым входом блока задержки, выход седьмого элемента И соединен со счетным входом счетчика, установочный вход которого соединен с первым выходом блока синхронизации, выход Запись
От Йй/
2Ц/
Упр.
2263318
регистра соединен с вторым выходом блока синхронизации, а третий вход блока задержки подключен к шине управляющих сигналов, а четвертые входы 5 блока задержки соединены с кодовой оганой, определяющей величину задержки.
. h 1/ t Ф
23
-f
25
/V
/cv
2б1(Фмг.2
/77 Фo
Редактор Р.Цицика
Составитель В.Шубин Техред Л.Олейник
Заказ 2125/42 Тираж 728Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Фи&. 5
Корректор М.Максимишинец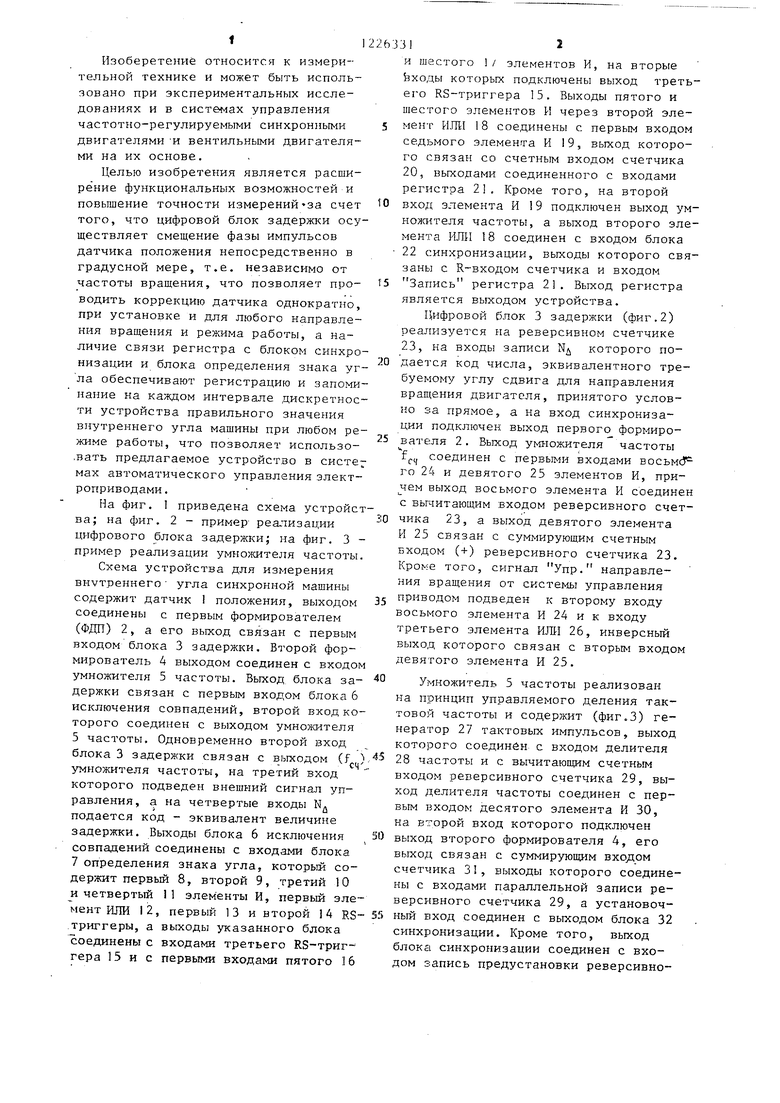
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2011 |
|
RU2450447C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ВРАЩЕНИЯ | 1988 |
|
SU1579227A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Умножитель частоты следования импульсов | 1986 |
|
SU1483630A1 |
| Устройство для поверки цифровых измерителей девиации фазы | 1990 |
|
SU1781651A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С КАНАЛАМИ СВЯЗИ | 1990 |
|
RU2020565C1 |
| Устройство для определения первой разности частотно-импульсного сигнала | 1982 |
|
SU1043675A1 |
| Устройство программного управления антенной | 1988 |
|
SU1594487A1 |
Изоберетение относится к измерительной технике и может быть использовано при экспериментальных исследованиях в системах управления с частотно-регулируемыми синхронными двигателями и вентильными двигателями на их основе. Цель изобретения - расширение функциональных возможностей и повышение точности измерений. Это достигается тем, что цифровой блок задержки осуществляет смешение фазы импульсов датчика положения непосредственно в градусном измерении, т.е. независимо от частоты враш;ения, т.е. позволяет проводить коррекцию датчика однократно, при установке и для любого на правления вращения и релшма работы, а наличие связи регистра с блоком синхронизации и наличие блока определения знака угла обеспечивает регистрацию и запоминание на каждом интервале дискретности устройства правильного значения внутреннего угла машины при любом режиме работы. Это позволяет использовать данное устройство в системах автоматического управления электроприводами. Функциональная схема устройства и пример схемной реализации цифрового блока и умножителя частоты с пояснением особенности их работы приводятся в описании изобретения. 3 ил. § (Л с
| Устройство для определения знака разности фаз | 1977 |
|
SU700843A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения и регистрации внутреннего угла синхронной машины | 1980 |
|
SU945822A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
