Изобретение относится к автоматическому управлению, в частности к специализированным управляющим и вычислительным устройствам, и может быть, использовано в системах программного управления антеннами, телескопами и другими устройствами, требующими наведения в горизонтальной и вертикальной плоскостях.
Цель изобретения - повышение надежности устройства за счет введения цепи контроля за процессом поворота
антенны как во время наведения антенны в расчетную точку, так и во время слежения за целью.
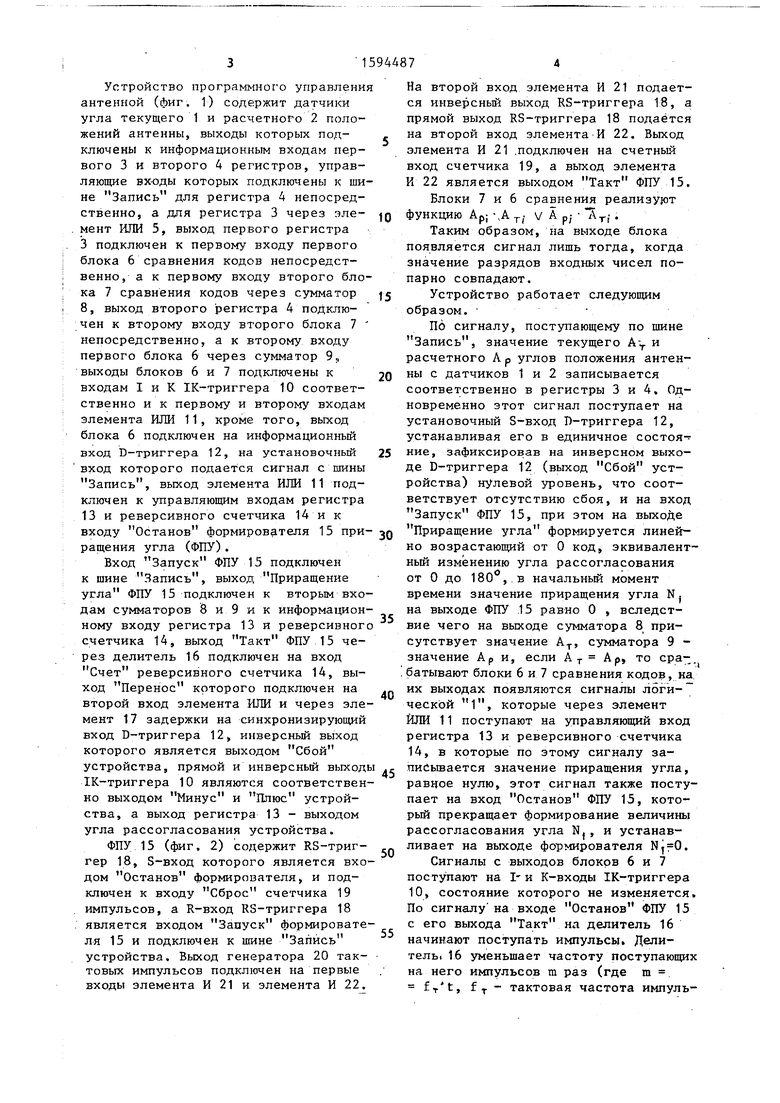
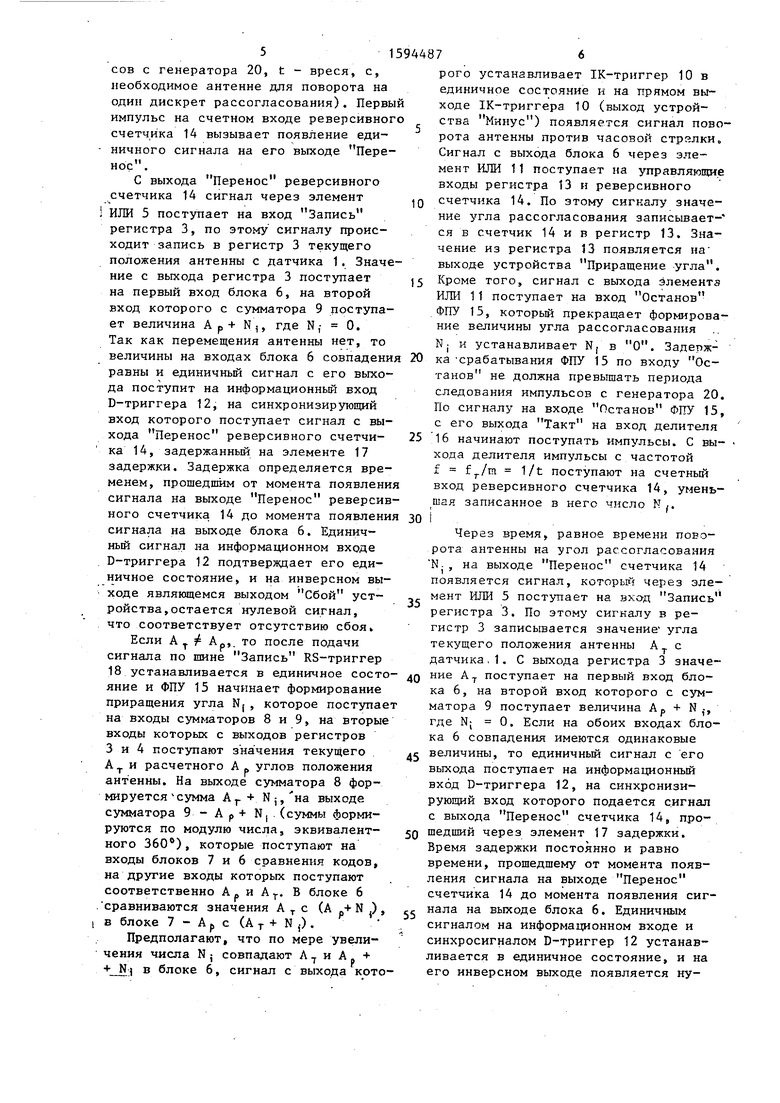
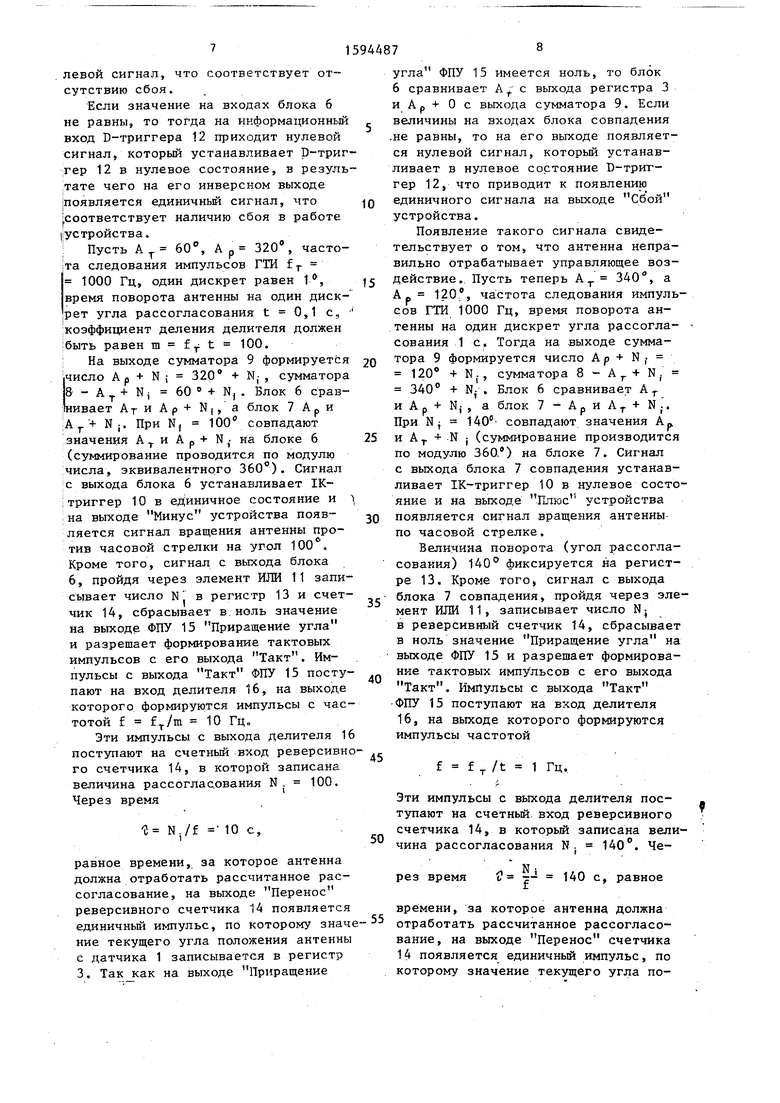
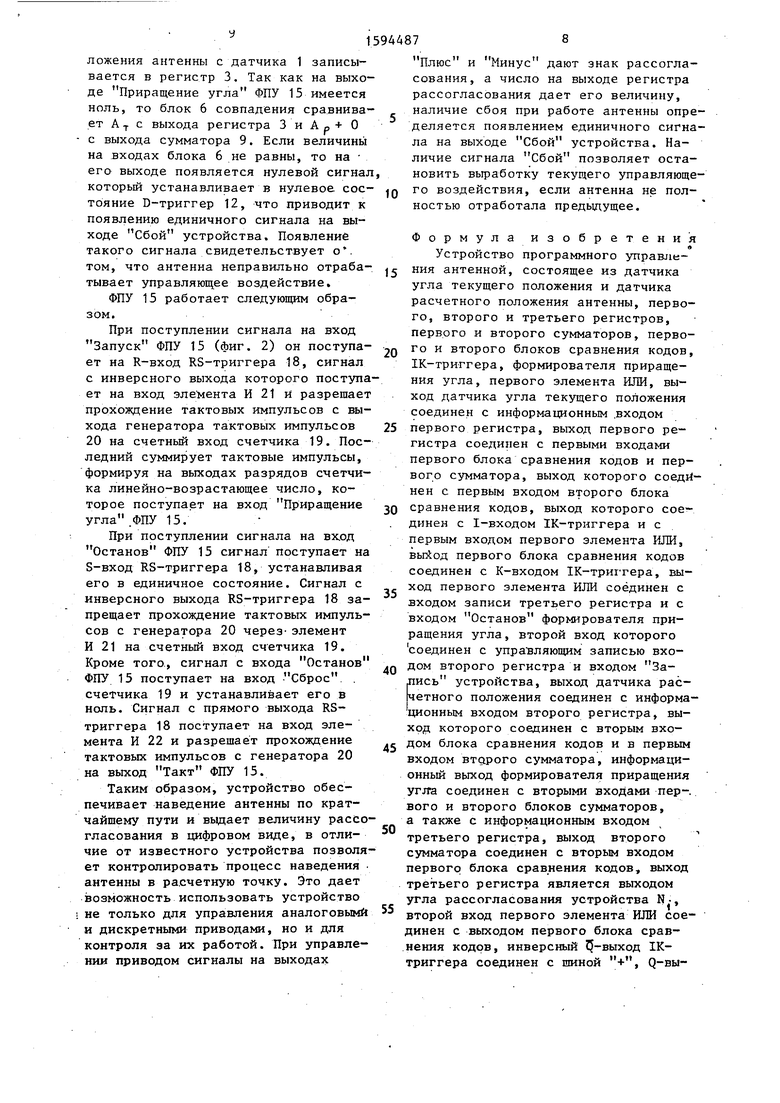
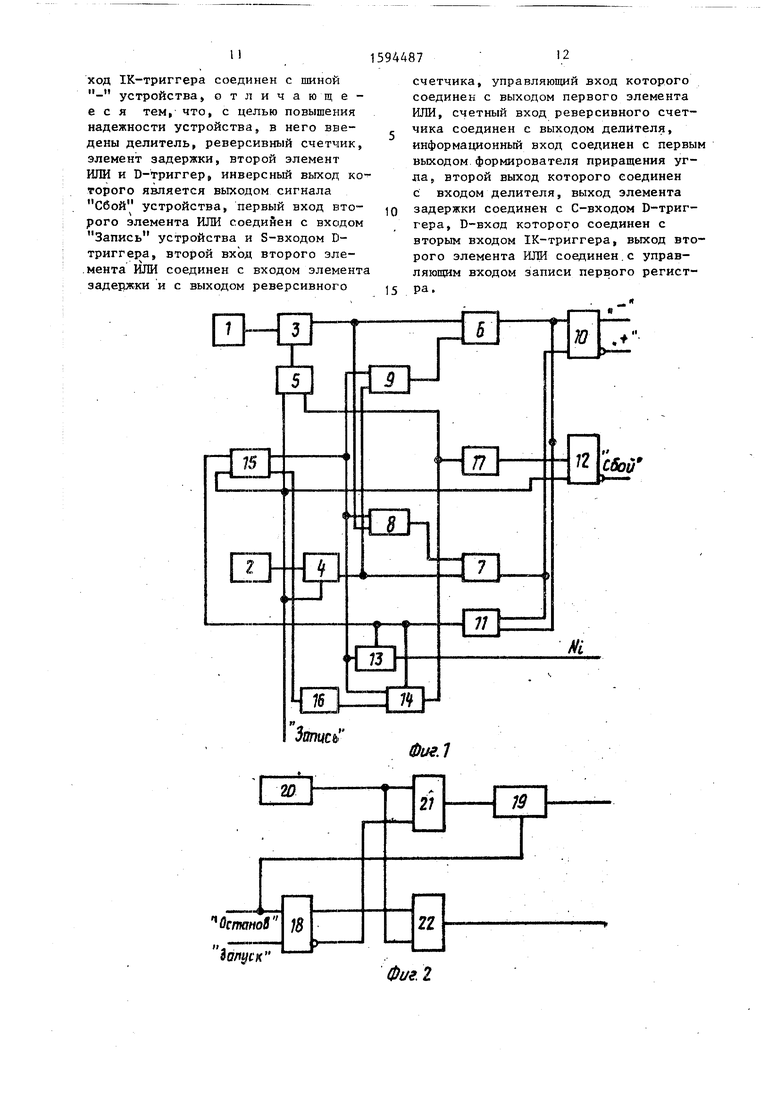
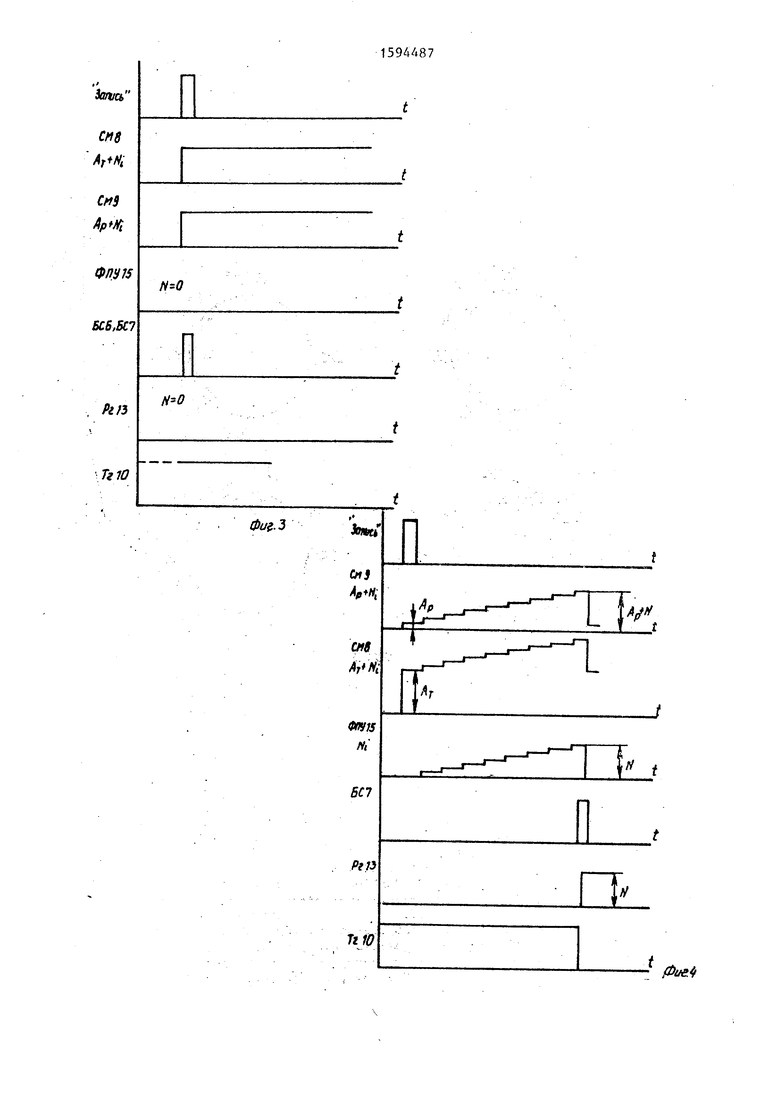
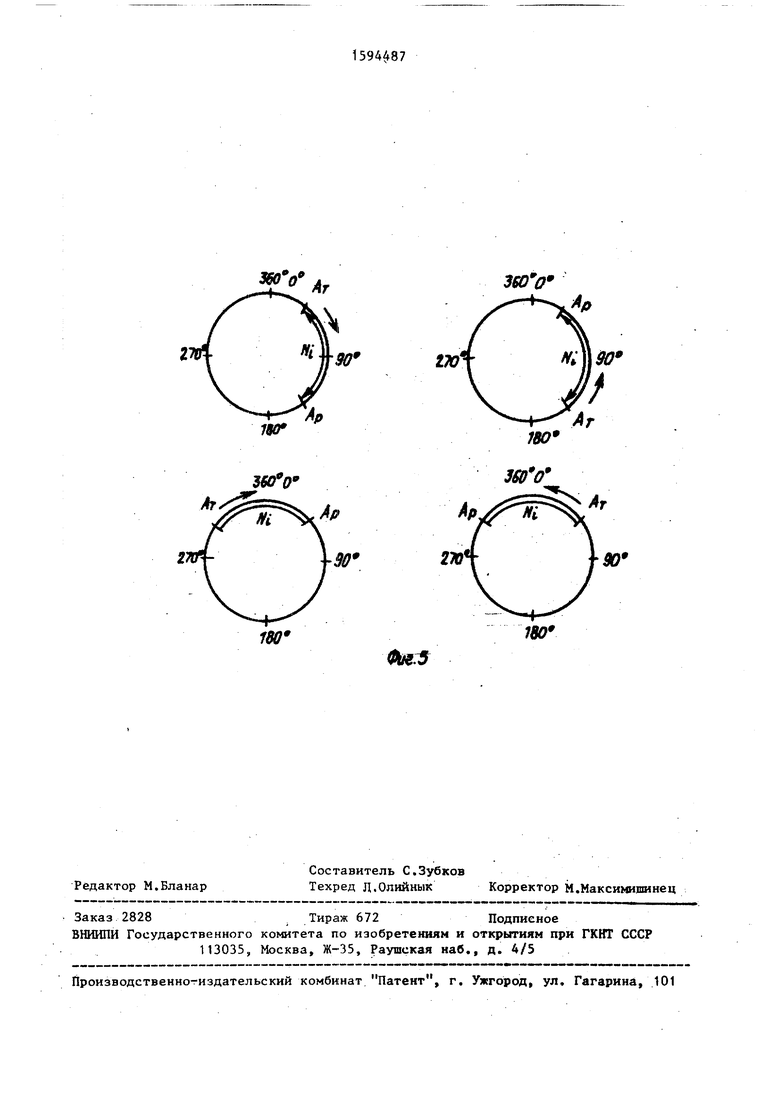
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - формирователь приращения угла; на фиг. 3 и 4 - временные диаграммы работы устройства программного управления антенной; на фиг. 5 - диаграммы движения антенны для различных величин А и расчетного А углов положения антенны.
01
4
00
|
Устройство программного управлени антенной (фиг. 1) содержит датчики угла текущего 1 и расчетного 2 положений антенны, выходы которых подключены к информационным входам первого 3 и второго 4 регистров, управляющие входы которых подключены к шине Запись для регистра 4 непосредственно, а для регистра 3 через элемент ИЛИ 5, выход первого регистра 3 подключен к первому входу первого блока 6 сравнения кодов непосредственно, а к первому входу второго блока 7 сравнения кодов через сумматор 8, выход второго регистра 4 подключен к второму входу второго блока 7 непосредственно, а к второму входу первого блока 6 через сумматор 9,, выходы блоков 6 и 7 подключены к входам I и К 1К-триггера 10 соответственно и к первому и второму входам элемента ИЛИ 11, кроме того, выход блока 6 подключен на информационный вход D-триггера 12, на установочный вход которого подается сигнал с втны Запись, выход элемента ИЛИ 11 подключен к управляющим входам регистра 13 и реверсивного счетчика 14 и к входу Останов формирователя 15 приращения угла (ФПУ).
Вход Запуск ФЛУ 15 подключен к шине Запись, выход Приращение угла ФПУ 15 подключен к вторым входам сумматоров 8 и 9 и к информационному входу регистра 13 и реверсивног счетчика 14, выход Такт ФПУ 15 через делитель 16 подключен на вход Счет реверсивного счетчика 14, выход Перенос которого подключен на второй вход элемента ИЛИ и через элемент 17 задержки на синхронизирующий вход D-триггера 12, инверсньй выход которого является выходом Сбой устройства, прямой и инверсный выход 1К-триггера 10 являются соответственно выходом Минус и Плюс устройства, а выход регистра 13 - выходом угла рассогласования устройства.
ФПУ 15 (фиг. 2) содержит RS-триг- гер 18, S-вход которого является входом Останов формирователя, и подключен к входу Сброс счетчика 19 импульсов, а R-вход RS-триггера 18 . является входом Запуск формирователя 15 и подключен к шине Запись устройства. Выход генератора 20 тактовых импульсов подключен на первые входы элемента И 21 и элемента И 22.
0
5
0
5
0
5
0
5
0
5
На второй вход элемента И 21 подается инверсньй выход RS-триггера 18, а прямой выход RS-триггера 18 подаётся на второй вход элемента И 22. Выход элемента И 21 .подключен на счетный вход счетчика 19, а выход элемента И 22 является выходом Такт ФПУ 15. Блоки 7 и 6 сравнения реализуют
функцию Apj А j V А р; ST-; .
Таким образом, на выходе блока появляется сигнал лишь тогда, когда значение разрядов входных чисел попарно совпадают.
Устройство работает следующим образом.
По сигналу, поступающему по шине Запись, значение текущего Ау и расчетного Ар углов положения антенны с датчиков 1 и 2 записывается соответственно в регистры 3 и 4. Одновременно этот сигнал поступает на установочный S-вход Р-триггера 12, устанавливая его в единичное состоя- нив, зафиксировав на инверсном выходе D-триггера 12 (выход Сбой устройства) нулевой уровень, что соответствует отсутствию сбоя, и на вход Запуск ФПУ 15, при этом на выходе Приращение угла формируется линейно возрастающий от О код, эквивалентный изменению угла рассогласования от О до 180,. в начальный момент времени значение приращения угла Nj на выходе ФПУ .15 равно О , вследствие чего на выходе сумматора 8 присутствует значение А., сумматора 9 - значение Ар и, если Ар, то ера-. . батывают блоки 6 и 7 сравнения кодов, на. их выходах появляются сигналы логи- ческой 1, которые через элемент ИЛИ 11 поступают на управляющий вход регистра 13 и реверсивного счетчика 14, в которые по этому сигналу за- пиСьтается значение приращения угла, равное нулю, этот сигнал также поступает на вход Останов ФПУ 15, который прекращает формирование величины рассогласования угла N, и устанавливает на выходе формирователя NjfO.
Сигналы с выходов блоков 6 и 7 поступают на I- и К-входы 1К-триггера 10, состояние которого не изменяется. По сигналу на входе Останов ФПУ 15 с его выхода Такт на делитель 16 начинают поступать импульсы, Лели- тель. 16 уменьшает частоту поступающих на него импульсов m раз (где m fr t, fr тактовая частота импульсов с генератора 20, t - вреся, с, необходимое антенне для поворота на один дискрет рассогласования), Первы импульс на счетном входе реверсивно счетчика 14 вызывает появление единичного сигнала на его выходе Перенос .
С выхода Перенос реверсивного счетчика 14 сигнал через элемент ИЛИ 5 поступает на вход Запись регистра 3, по этому сигналу происходит запись в регистр 3 текущего положения антенны с датчика 1. Значение с выхода регистра 3 поступает на первый вход блока 6, на второй вход которого с сумматора 9 поступает величина А р + N,, где N,- 0. Так как перемещения антенны нет, то величины на входах блока 6 совпадени равны и единичньй сигнал с его выхода поступит на информационный вход D-триггера 12, на синхронизирующий вход которого поступает сигнал с выхода Перенос реверсивного счетчика 14, задержанный на элементе 17 задержки. Задержка определяется временем, прошедшим от момента появлени сигнала на выходе Перенос реверсивного счетчика 14 до момента появлени сигнала на выходе блока 6. Единичный сигнал на информационном входе D-триггера 12 подтверяадает его единичное состояние, и на инверсном выходе являющемся выходом Сбой устройства, остается нулевой сигнал, что соответствует отсутствию сбоя.
Если А Ар,, то после подачи сигнала по шине Запись RS-триггер 18 устанавливается в единичное состояние и ФПУ 15 начинает формирование приращения угла NJ, которое поступае на входы сумматоров 8 и 9, на вторые входы которых с выходов регистров 3 и 4 поступают значения текущего А и расчетного А ., углов положения антенны. На выходе сумматора 8 формируется сумма А + N J, на выходе сумматора 9 - А р + N,.(суммы формируются по модулю числа, эквивалентного 360), которые поступают на входы блоков 7 и 6 сравнения кодов, на другие входы которых поступают соответственно А . и
А . В блоке 6
Я-N,):
сравниваются значения А с (А .+ в блоке 7 - А р с (А т- + N j) .
Предполагают, что по мере увеличения числа N j совпадают А и А + + N) в блоке 6, сигнал с выхода кото
44876
рого устанавливает 1К-триггер 10 в единичное состояние и на прямом выходе 1К-триггера 10 (выход устрой- ства Минус) появляется сигнал поворота антенны против часовой стрелки. Сигнал с выхода блока 6 через элемент ИЛИ 11 поступает на управляющие входы регистра 13 и реверсивного 1Q счетчика 14. По этому сигналу значение угла рассогласования записьшает- ся в счетчик 14 и в регистр 13. Значение из регистра 13 появляется на выходе устройства Приращение угла. 15 Кроме того, сигнал с выхода элемента ИЛИ 11 поступает на вход Останов ФПУ 15, который прекращает формирование величины угла рассогласования NJ и устанавливает N, в О. Задерж- 20 ка -срабатывания ФПУ 15 по входу Останов не должна превышать периода следования импульсов с генератора 20. По сигналу на входе Останов ФПУ 15, с его выхода Такт на вход делителя 16 начинают поступать импульсы. С вы- хода делителя импульсы с частотой f 1/t поступают на счетный вход реверсивного счетчика 14, уменьшая записанное в него число N ,,
25
30
5
0
Через время, равное времени поворота антенны на угол рассогласования Nj, на выходе Перенос счетчика 14 появляется сигнал, который через элемент ИЛИ 5 поступает на вход Запись регистра 3. По этому сигналу в регистр 3 записывается значение- угла текущего положения антенны Ас датчика,1. С выхода регистра 3 значение А поступает на первый вход блока 6 , на второй вход которого с сумматора 9 поступает величина Ар +
N
5
0
5
где N; 0. Если на обоих входах блока 6 совпадения имеются одинаковые величины, то единичный сигнал с его выхода поступает на информационный вход D-триггера 12, на синхронизирующий вход которого подается сигнал с выхода Перенос счетчика 14, прошедший через элемент 17 задержки. Время задержки постоянно и равно времени, прошедшему от момента появления сигнала на выходе Перенос счетчика 14 до момента появления сигнала на выходе блока 6. Единичным сигналом на информационном входе и синхросигналом D-триггер 12 устанавливается в единичное состояние, и на его инверсном выходе появляется нулевой сигнал, что соответствует отсутствию сбоя.
Если значение на входах блока 6 не равны, то тогда на информационный вход D-триггера 12 приходит нулевой сигнал, который устанавливает р-триг гер 12 в нулевое состояние, в результате чего на его инверсном выходе появляется единичньй сигнал, что соответствует наличию сбоя в работе |;ус тройства.
V Пусть А 60, Ар 320, частота следования импульсов ГТИ f,- 1000 Гц, один дискрет равен I, время поворота антенны на один дискрет угла рассогласования t 0,1 с, :коэффициент деления делителя должен быть равен m f t 100.
На выходе сумматора 9 формируется (ЧИСЛО Ар + N ; 320 + NJ , сумматора
- А +
Nj 60 + N.. Блок 6 сравивает АтиАр+N,, а блок 7
Ар и
:А + NJ. При N, 100 совпадают значения А и А р N,. на блоке 6 (суммирование проводится по модулю числа, эквивалентного 360°). Сигнал :с выхода блока 6 устанавливает IK- ;триггер 10 в единичное состояние и
на выходе Минус устройства появляется сигнал вращения антенны против часовой стрелки на угол 100 . Кроме того, сигнал с выхода блока 6, пройдя через элемент ИЛИ 11 записывает число N. в регистр 13 и счет
чик 14, сбрасывает в.ноль значение на выходе ФПУ 15 Приращение угла и разрешает формирование тактовых импульсов с его выхода Такт. Импульсы с выхода Такт ФПУ 15 поступают на вход делителя 16, на выходе которого формируются импульсы с частотой f 10 Гц.
Эти импульсы с выхода делителя 1 поступают на счетный вход реверсивн го счетчика 14, в которой записана величина рассогласования N . 100. Через время
1 N./f 10 с,
равное времени, за которое антенна должна отработать рассчитанное рассогласование, на выходе Перенос реверсивного счетчика 14 появляется единичный импульс, по которому значе ние текущего угла положения антенны с датчика 1 записывается в регистр 3. Так как на вых.оде Приращение
10
15
20
25
30
35
40
- д,
угла ФПУ 15 имеется ноль, то блок 6 сравнивает Af с выхода регистра 3 и Ар + О с выхода сумматора 9. Если величины на входах блока совпадения .не равны, то на его выходе появляется нулевой сигнал, которьй устанавливает в нулевое состояние D-триг- гер 12, что приводит к появлению единичного сигнала на выходе Сбой устройства.
Появление такого сигнала свидетельствует о том, что антенна неправильно отрабатывает управляющее воздействие.. Пусть теперь А 340, а Ар 120, частота следования импульсов ГТИ 1000 Гц, время поворота антенны на один дискрет угла рассогласования 1 с. Тогда на выходе сумматора 9 формируется число А р + N , 120 + NJ, сумматора 8 - N, 340 + N; . Блок 6 сравнивает А
50
N.
и А р + NJ, а блок 7 - А, 140
и А +
N..
При N совпадают значения п. и А.,. + N j (суммирование производится по модулю 360,) на блоке 7. Сигнал с выхода блока 7 совпадения устанавливает 1К-триггер 10 в нулевое состояние и на выходе Плюс устройства появляется сигнал вращения антенны- по часовой стрелке.
Величина поворота (угол рассогласования) 140 фиксируется на регистре 13. Кроме того, сигнал с выхода блока 7 совпадения, пройдя через элемент ИЛИ 11, записывает чис.по N в реверсивный счетчик 14, сбрасывает в ноль значение Приращение угла на выходе ФПУ 15 и разрешает формирование тактовых импульсов с его выхода Такт. Импульсы с выхода Такт ФПУ 15 поступают на вход делителя 16, на выходе которого формируются импульсы частотой
f f /t 1 Гц..
Эти импульсы с выхода делители поступают на счетный, вход реверсивного счетчика 14, в который записана величина рассогласования N. 140°. Через время
|л 140
равное
55
времени, за которое антенна должна отработать рассчитанное рассогласование, на выходе Перенос счетчика 14 появляется единичный импульс, по которому значение текущего угла по10
20
25
ложения антенны с датчика 1 записывается в регистр 3, Так как на выходе Приращение угла ФПУ 15 имеется ноль, то блок 6 совпадения сравнивает А с выхода регистра 3 и Ар + О с выхода сумматора 9. Если величины на входах блока 6 не равны, то на его выходе появляется нулевой сигнал, который устанавливает в нулевое состояние D-триггер 12, что приводит к появлению единичного сигнала на выходе Сбой устройства. Появление такого сигнала свидетельствует о , том, что антенна неправильно отраба- тывает управляющее воздействие.
ФПУ 15 работает следующим образом.
При поступлении сигнала на вход Запуск ФПУ 15 (фиг. 2) он поступает на R-вход RS-триггера 18, сигнал с инверсного выхода которого поступает на вход эле мента И 21 и разрешает прохождение тактовых импульсов с выхода генератора тактовых импульсов 20 на счетный вход счетчика 19. Последний суммирует тактовые импульсы, формируя на выходах разрядов счетчика линейно-возрастающее число, которое поступает на вход Приращение угла .ФПУ 15.
При поступлении сигнала на вход Останов ФПУ 15 сигнал поступает на S-вход RS-триггера 18, устанавливая его в единичное состояние. Сигнал с инверсного выхода RS-триггера 18 запрещает прохождение тактовых импульсов с генератора 20 через- элемент И 21 на счетный вход счетчика 19. Кроме того, сигнал с входа Останов ФПУ 15 поступает на вход Сброс. . счетчика 19 и устанавливает его в ноль. Сигнал с прямого выхода RS- триггера 18 поступает на вход элемента И 22 к разрешает прохождение тактовых импульсов с генератора 20 на выход Такт ФПУ 15.
Таким образом, устройство обеспечивает наведение антенны по кратчайшему пути и вьщает величину рассогласования в цифровом виде, в отли чие от известного устройства позволяет контролировать процесс наведения антенны в расчетную точку. Это дает возможность использовать устройство не только для управления аналоговыми и дискретными приводами, но и для контроля за их работой. При управлении приводом сигналы на выходах
30
35
40
50
55
д5
10
,
944878
Плюс и Минус дают знак рассогласования, а число на выходе регистра рассогласования дает его величину, наличие сбоя при работе антенны определяется появлением единичного сигнала на выходе Сбой устройства. Наличие сигнала Сбой позволяет остановить вьфаботку текущего управляющего воздействия, если антенна не полностью отработала предыдущее.
20
25
,
30
35
40
50
55
Ф
ормула изобретения
Устройство программного управления антенной, состоящее из датчика угла текущего положения и датчика расчетного положения антенны, первого, второго и третьего регистров, первого и второго сумматоров, первого и второго блоков сравнения кодов, 1К-триггера, формирователя приращения угла, первого элемента ИЛИ, выход датчика угла текущего положения соединен с информационным .входом первого регистра, выход первого регистра соединен с первыми входами первого блока сравнения кодов и первого сумматора, выход которого соединен с первым входом второго блока сравнения кодов, выход которого соединен с 1-входом 1К-триггера и с первым входом первого элемента ИЛИ, вьйод первого блока сравнения кодов соединен с К-входом 1К-триггера, выход первого элемента ИЛИ соединен с входом записи третьего регистра и с входом Останов формирователя приращения угла, второй вход которого соединен с управляющим записью входом второго регистра и входом За- лись устройства, выход датчика рас- метного положения соединен с информационным входом второго регистра, выход которого соединен с вторым вхо- д5 дом блока сравнения кодов и в первым входом втдрого сумматора, информационный выход формирователя приращения угла соединен с вторыми входами пер-, вого и второго блоков сумматоров, а также с информационным входом третьего регистра, выход второго сумматора соединен с вторым входом первого блока сравнения кодов., выход третьего регистра является выходом угла рассогласования устройства N, второй вход первого элемента ИЛИ соединен с выходом первого блока сравнения кодов, инверсный -выход IK- триггера соединен с шиной +, Q-выход IK-триггера соединен с шиной - устройства, отличающееся тем, что, с целью повышения надежности устройства, в него введены делитель, реверсивный счетчик, элемент задержки, второй элемент ИЛИ и В-триггерк инверсный выход ко- торого является выходом сигнала сбой устройства, первый вход второго элемента ИЛИ соединен с входом Запись устройства и S-входом D- триггера, второй вход второго эле- .мента ИЛИ соединен с входом элемента задержки и с выходом реверсивного
счетчика, управляющий вход которого соединен с выходом первого элемента ИЛИ, счетный вход реверсивного счетчика соединен с выходом делителя, информационный вход соединен с первым выходом формирователя приращения угла, второй выход которого соединен с входом делителя, выход элемента задержки соединен с С-входом D-триг- гера, D-вход которого соединен с вторым входом 1К-триггера, выход второго элемента ШШ соединен, с управляющим входом записи первого регистра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Устройство для измерения параметров динамического процесса и управления с самоконтролем | 1986 |
|
SU1495751A1 |
| Цифровой измеритель длительности периода | 1981 |
|
SU1004955A1 |
| Устройство аналого-цифрового преобразования | 1986 |
|
SU1343551A1 |
| Цифровой интегратор | 1984 |
|
SU1171789A1 |
| Измерительное устройство с самоконтролем | 1984 |
|
SU1233112A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
Изобретение относится к автоматическому управлению, в частности к специализированным управляющим и вычислительным устройствам, и может быть использовано в системах программного управления антеннами, телескопами и др.устройствами. Цель изобретения - повышение надежности устройства за счет введения цепи контроля за процессом поворота антенны. Устройство программного управления антенной содержит датчики текущего и расчетного положений антенны, регистры, элементы И, ИЛИ, сумматоры, первый и второй блоки сравнения кодов, реверсивные счетчики, элементы задержки, формирователь приращения угла. Данное устройство обеспечивает наведение антенны по кратчайшему пути и выдает величину рассогласования в цифровом виде, т.е. это дает возможность использовать его для управления аналоговыми и дискретными приводами и для контроля за их работой. 4 ил.
5яп«св,
Сбой
ФиеЛ
iancb
CMS
CffJ Apt Hi
ФЛУ75 БС6,К7
Рг/З
Золи
CMi ,
сне
Дг М
«W75 ff,
ВС7
т о
-
v
Ъ90 0
3SO 0
Af,
:5
| И. Г. Моисеев,И. И. Погожее, Ю. Н. Семенов и Н. М. Якименко | 0 |
|
SU174689A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 3448360, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Применение интегральных микросхем в электронной вычислительной технике | |||
| Справочник | |||
| - М.: Советское радио, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Цифровые устройства на микросхемах | |||
| /Под ред | |||
| Волчека В.Л., Ойхма- на Е.Г | |||
| М.: Энергия, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Авторское свидетельство СССР № 1195337, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| I | |||
