тегратора и с третьим входом третьего сумматора.
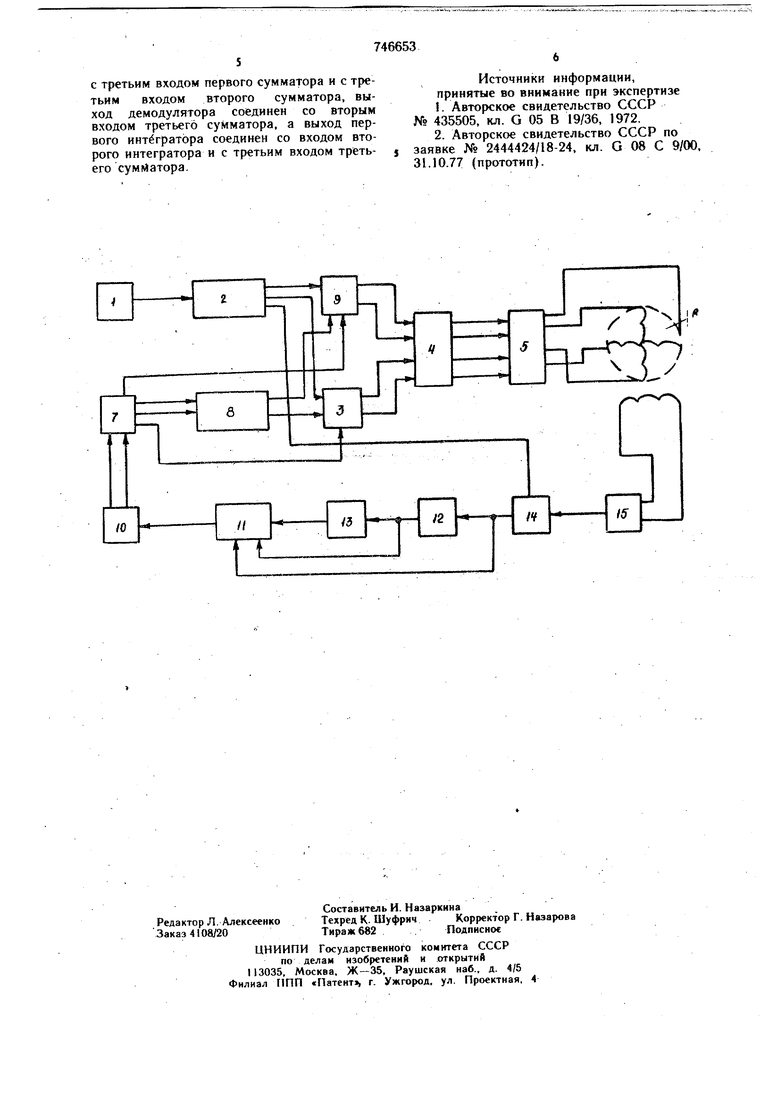
На чертеже приведена блок-схема предлагаемого устройства для преобразования перемещение-код-фаза.
Устройство содержит генератор 1 импульсов, опорный делитель 2 частоты, первый сумматор 3, первый логический блок 4, блок 5 ключей, датчик 6 перемещения, второй логический блок 7, реверсивный счетчик 8, второй сумматор 9, преобразователь 10 напряжение-частота, третий сумматор 11, первый интегратор 12, второй интегратор 13, демодулятор 14, фильтр 15.
Устройство работает следующим образом.
Импульсы тактовой частоты от генератора 1 импульсов заполняют опорный делитель 2. На входы первого сумматора 3 информация от опорного делителя 2 и реверсивного счетчика 8 поступает в прямых кодах. На входы второго сумматора 9 информация от опорного делителя 2 поступает в прямом коде, а от реверсивного счетчика 8- в обратном. Модулированные по фазе прямоугольные сигналы с выходов первого и второго сумматоров 3 и 9 через первый логический блок 4, формирующий две последовательности чередующихся разнополярных щиротно-модулированных прямоугольных импульсов, поступают на блок 5 ключей, выходы которого соединены с ВХодными обмотками датчика 6 перемещения.
Выходной сигнал с датчика 6 через фильтр 45 поступает на демодулятор 14. На выходе демодулятора 14 формируется напряжение рассогласования, поступающее на вход первого интегратора 12. Выходное напряжение первого интегратора 12, пропорциональное ускорению измеряемого перемещения, поступает на вход второго интегратора 13, на выходе которого формируется напряжение, пропорционалйное скорости измеряемого перемец ения.
Выходные напряжения демодулятора 14, первого интегратора 12 и второго интегратора 13 суммируются на третьем сумматоре М с соответствующими масштабными коэффициентами, обеспечивающими устойчивость, точность и быстродействие устройства для преобразования перемещеиие-код-фаза; Выходное напряжение третьего сумматора 11 поступает на вход преобразователя 10 напряжение-частота, на одном выходе которого формируется последовательность импульсов при положительной полярности вход ного сигнала, а на другом- при отрицательной полярности этого сигнала. Эти импульсы поступают на входы второго логического блока 7. При вращений входного вала датчика 6 перемещения на выходе третьего сумматора 11 формируется сигнал, полярность которого от направления вра щення вала датчика 6 перемещения. При высокой скорости перемещения импульсы, форм1нруемые преобразователем н;апряже нйечастотя поступают через второй логический
блок 7 на реверсивный счетчик 8. При неподвижном вале датчика 6 перемещения импульсы на выходах преобразователя 10 на пряжение-частота чередуются. Второй логический блок 7 не пропускает такие чередующиеся импульсы на входы реверсивного счетчика 8, а формирует взаимно инверсные чередующиеся логические уровни напряжений, поступающих на входы переноса в младщие разряды первого и второго сумматоров 3 и 9, что приводит к небольшим изменениям фаз прямоугольных сигналов на выходах этих сумматоров. Поэтому устройство остается замкнутым по цепи обратной связи, несмотря на то, что информация, содержащаяся в реверсивном счетчике 8 при этом не изменяется. В связи с этим даже при малых скоростях измеряемого перемещения отсутствует неоднозначность преобразования перемещение-код, несмотря на то, что устройство в целом находится в режнме малых автоколебаний..
Использование новых элементов - второго интегратора, третьего сумматора и второго логического блока - выгодно отличает предлагаемое устройство от известных, так как указанные элементы позволяют уменьщить составляющие погрещности преобразования перемещение-код по ускорению и скорости, а Также устранить неоднозначность считывания информации в статическом режиме, что позволяет существенно повысить точность работы следящих систем, в которых предлагаемое устройство будет использовано в качестве преобразователя обратной связи по положению.
Формула изобретения
Устройство для преобразования перемещение-код-фаза, содержащее преобразователь напряжение частота, последовательно соединенные реверсивный счетчик и первый сумматор и последовательно соединенные генератор импульсов, опорный делитель частоТЬ1, второй сумматор, первый логический блок, блок ключей, датчик перемещения, фильтр, демодулятор, первый интегратор, второй выход опорного делителя частоты соединен со вторым вхоДом демодулятора, т|ретий выход опорного делителя частоты соединен со вторым входом первого сумматора, второй выход реверсивного счетчика соединен со вторым входом второго сумматора, выходы первого сумматора соединены с другими входами первого логического блока, отличающееся тем, что, с целью повыщения точности устройства, в него введены второй логический блок и последовательно соединенные второй интегратор и третий сумматор, выход которого через последовательно соединенные преобразователь напряжение-частдта и второй логический блок соединен со входами реверсивного счетчика.
с третьим входом первого сумматора и с третьим входом второго сумматора, выход демодулятора соединен со вторым входом третьего сумматора, а выход первого интегратора соединен со входом второго интегратора и с третьим входом третьего сумматора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 435505, кл. G 05 В 19/36, 1972.
2.Авторское свидетельство СССР по заявке К 2444424/18-24, кл. G 08 С 9/00, 31.10.77 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Устройство для программного управления приводом | 1984 |
|
SU1226410A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1020845A1 |
| Устройство для преобразования "перемещение-код-фаза" | 1977 |
|
SU670956A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1531221A1 |
| Устройство для преобразования перемещение-код-фаза | 1986 |
|
SU1349003A2 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
