I
Изобретение относится к области автоматики и моясет быть использовано в системах управления станками, имеющими портальную (рамную) конструкцию, Оно может быть также использовано в других отраслях техники, где требуется синхронное перемещение двух или более объектов.
Известно устройство, обеспечивающее синхронное перемещение двух подвижных объектов путем коррекции перемещения одного из объектов. Устройство содержит два источника сигнала скорости объектов, фазовый компаратор, генератор управляющих сигналов, блок обратной связи р.,
Каждый из объектов соединен с источником сигнала, пропорционального скорости данного объекта, выходы источйиков сигнала соединены с двумя входами фазового компаратора, выход которого связан со входом генератора управляк щих сигналов, а выход генератора управи ляющах сигналов соединен со входом
блока обратной связи, выход которого соединен с первътм объектом.
В известном устройстве в зависимости от с;шига фаз на входе фазового кок паратора генератор управляющего сигнала вырабатывает сигнал, который является мерой рассогласования скоростей объектов и отрабатывается блоком обратной связи. Сигнал обратной связи корректирует скорость перемещения первого
to объекта, за счет чего достигается синхронность перемещения объектов.
Предложенная схемная реализация устройства обеспечивает только синхронизацию скоростей объектов, но не исключает наличия постоянного рассогласования положений движущихся об,ъектов. Кроме того, данное схемное решение сложно использования в устройстве принципа 20 частотного управления блоком обратной связи, .
Наиболее близким техническим решением к данному изобретению является устройство для управления синхронно
еремещающимися объектами, содержаее блок ввода программы, первый второй приводы, подключенные соотетственно к первому и второму датчиам скорости вращения и первый и втоой позиционные датчики, соединенные O .входами преобразователя 2 .
Задание величины и скорости перемещения на оба привода осуществляется в данной системе от устройства числового программного управления независимо. Устройство регулирования равномерного хода управляется cи нaлoм рассогласования опопожений обенх сторон портала. Фактическое положение каждсй стороны портала измеряется соответствующим измерительным устройством.
Поскольку для управления объектом требуются два самостоятельных канала формирования задания в устройстве числового программного управления, программирование перемещений по двум каналам и две следящие системы с датчиками перемещения и соответствующими преобразователями их сигналов в вид принимаемый у стройством числового программного управления, то такая система менее надежна. При возможных ощибках программирования и помехах в каналах задания информации о перемещении приводов портала в такой системе возникает постоянное рассогласование положений обеих сторон портала, особенно опасное при реверсах и динамических режимах работы.
Недостатком известного устройства является его низкая надежность.
Целью изобретения является повышение надежности устройства.
Поставленная цель достигается тем, что в устройство введены блок сравнения, блок временной задержки и сумматор, выход которого соединен ср. вторым приводом, первый вход - с вьрсодом пре. образователя, а второй нход - с выходом первого датчика скорости вращения, под- кяюченного к первому приводу через последовательно соединенные блок сравнеш я и блок временной задержки, вторые входы которых соединены соответственно с выходами второго датчика скорости вращения и блока ввода программы.
Такое устройство управляется заданием величины и скорости перемещения привода обеих сторон, портала от одного, канала устройства числового программбного управления, то есть задание программируется для одного привода. При
ЭТОМ требуется только одна следящая система с датчиком перемещения и преобразователем. Зависимое управление скоростью привода второго кодца портала от скорости привода первого конца портала обеспечивает защиту от появлен постоянного рассогласования положений обеих сторон портала и от возможного аварийного режима,
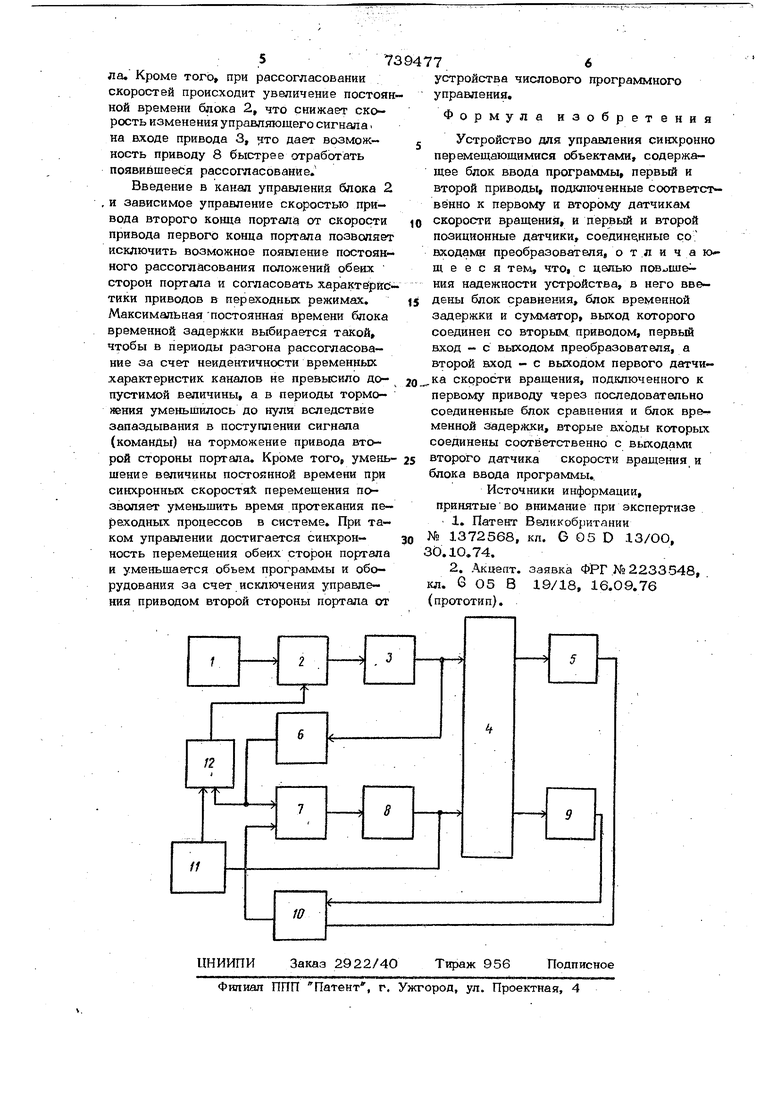
На чертеже представлена блок-схема устройства,
Устройство содержит блок 1 ввода программы, блок 2 временной задержки, первый привод 3, объект управления (портал) 4,. первый позиционный датчик 5, первьй датчик 6 скорости вращения, сумматор 7, второй привод 8, второй позиционный датчик 9, преобразователь 10, второй датчик 11 скорости вращения и блок 12 сравнения.
Устройство работает следующим образом.
Управляющий сигнал с выхода блока 1 через блок 2, предназначенный для получения желаемой переходной характеристики, поступает на управление приводом 3 первой стороны портала 4, Сигнал, пропорциональный частот вращения, вала исполнительного двигателя привода 3, формируемый датчиком 6, подается на один из входов сумматора 7. На второй вход сумматора 7 поступает сигнал с преобразователя 10. Сигнал с выхода сумматора 7 управляет приводом 8 второй стороны портала 4, Контрсшь факти- ческргр положения каждой стороны портала осуществляется датчиками 5 и 9, выходные сигналы от которых поступают на два входа преобразователя 1О, На входы блока 12 подаются сигналы датчиков 6 и 11, Полученный сигнал модуля разности воздействует на постоянную времени блока 2 по прямо пропорциональному закону. При синхронном перемещении обеих сторон портала сигнал на вььходе преобразователя равен нулю, и привод 8 второй стороны портала управляется только сигналом с датчика б. При рассогласовании положений первой и второй стороны портала синхронность их перемещения нарущается, и на выходе преобразователя 10 появляется сигнал, величина и знак которого определяется рассогласованием положений обеих сторон портала. Этот сигнал является дополнитеяьным управляющим сигналом для привода 8 второй стороны портала и корректирует положение сторон порта
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления синхронно перемещающимися объектами | 1981 |
|
SU1012204A1 |
| Устройство для управления синхронно перемещающимися объектами | 1984 |
|
SU1226411A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |
| Цифровая система синхронного управления приводами | 1974 |
|
SU543115A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
