(/иа
2ф
Изобретение относится к технике автоматического регулирования и может быть использовано при создании систем автоматического регулирования различных процессов в теплоэнергетике, химии и других отраслях промыш-. ленности при применении исполнительных механизмов постоянной скорости в случае, если объект регулирования содержит запаздьюание.
Цель изобретения - повышение быстродействия и точности регулятора.
На фиг, представлена принципиальная схема позиционного регулятора на фиг, 2 - пример переходного про- .цесса в системе автоматического регулирования при применении предложенного регулятсра и временные диаграммы напряжений основных элем- нтов схемы; на фиг, 3 - фазовый портрет системы регулирования с использованием регулятора,
Регулятор содержит задатчик регулируемого параметра 1, сумматор 2, трехпозиционные релейные блоки 3 и 4, содержавц1е соответственно компараторы 5, 6 и 7, 8, элементы ИЛИ 9, ГО, 11. и 12, элементы И 13 и 14, од- новибраторы 15 и 16, RS-триггер 17, усилители 18 и 19, В предлагаемом регуляторе в качестве усилителей мощности используются ключи, обеспечивающие подключение исполнительного механизма системы регулирования к питающему напряжению, В процессе регулирования регулятор обеспечивает управление исполнительным механизмом .20, представляющим собой в динамическом отношении интегрирующее звено. Текущее значение параметра снимается с датчика регулируемого параметра 21,
. Регулятор работает следующим образомо
На первый вход сумматора 2 поступает напряжение Vp, пропорциональное текущему значению регулируемого параметра, а на второй напряжение Vjaq, пропорциональное заданному значению параметра, С выхода сумматора 2 сигнал рассогласования Vo, равный разности между заданным и текущим значением регулируемого параметра, пос- тзгпает на входы трехпозиционных релейных блоков 3 и 4 и, соответствен- но, на входы компараторов 5, 6, 7, 8 Настройка компараторов 5 и 6 производится с обеспечением зоны нечувст
вительности «я , а компараторов 7 и 8 с обеспечением зоны нечувствительности Ь, Для нормальной работы р егулятора необходимо выполнение
условия
, В случае, если, на0
0
5
5
0
5
0
5
0
5
пример, b О, а в начальньй момент отработки управляющего или возмущающего воздействия Vo О и I V, I ) at , то дальнейшая работа регулятора происходит в описанной ниже последовательности
При YO а на выходе компаратора 5 имеется напряжение V,j , которое поступает на входы элемента ИЛИ 10 и элемента ИЛИ 9, Напряжение V с выхода элемента ИЛИ 10 открьшает ключи ( усилитель мощности ) 18 и питающее напряжение поступает в одну из обмоток исполнительного механизма 20, вызьшая его перемещение в направлении уменьшения сигнала .рассогласования о , Сигнал Ve с прямого выходы элемента ИЛИ 9 поступает на вход R триггера 17, приводя его в исходное состояние, а сигнал Vg с инверсного выхода элемента ИЛИ 9 - на входы элементов И 13 и 14, Поскольку в этом состоянии регулятора сигнал V9 0, то это обеспечивает невозможность включения обмоток исполнительного механизма 20 по другим цепям управления регуляторао В данном состоянии регулятора имеется напряжение V на выходе компаратора 7, поступающее на вход элемента И 13 и на один из В540дов элемента ИЛИ 12, При работе регулятора появление сигнала Vj- на выходе элемента ИЛИ 12 вызьшает запуск одновибратора 15 по переднему фронту сигнала и, соответственно, переключение триггера 17, Однако, поскольку в любой ситуации работы регулятора появление сигнала V на выходе компаратора 7 происходит раньше появления сигнала УЛ на выходе компаратора 5, а длительность импульса напряжения V на выходе одновибратора 15 устанавливается предельно малой величины, достаточной для переключения триггера 17, то в рассматриваемый момент времени сигнал V 0, а также равны О сигналы Уб к V-
Происходит уменьшение сигнала рассогласования Vo , В момент времени, когда величина сигнала рассогласования становится меньше а сигнал
VY на выходе компаратора 5 становится равным О о Соответственно становятся равными О сигналы Vg и V , Сиг нал V, принимает единичное значение, но появление сигнала V,, или на выходах элементов 13 и 14 не происходит, поскольку сигнал Vj имеет нулевое значение.
Исполнительный механизм 20 пета- навливается, но в связи с продолжающимся процессом изменения сигнала рассогласования VQ при дальнейшем его уменьшении, когда его величина
ходит срабатьшания компаратора 7, то движение исполнительного механизма прекращается и следующее его перемещение происходит после срабатывания компаратора 5 и 6„ Описанный процесс происходит и при изменении сигнала рассогласования в другом направлении при соответствующем сра- б атьшании компаратора 7, Таким образом, при работе регулятора осуществляется предварительное включение воздействия при настраиваемых границах зон нечувствительности компара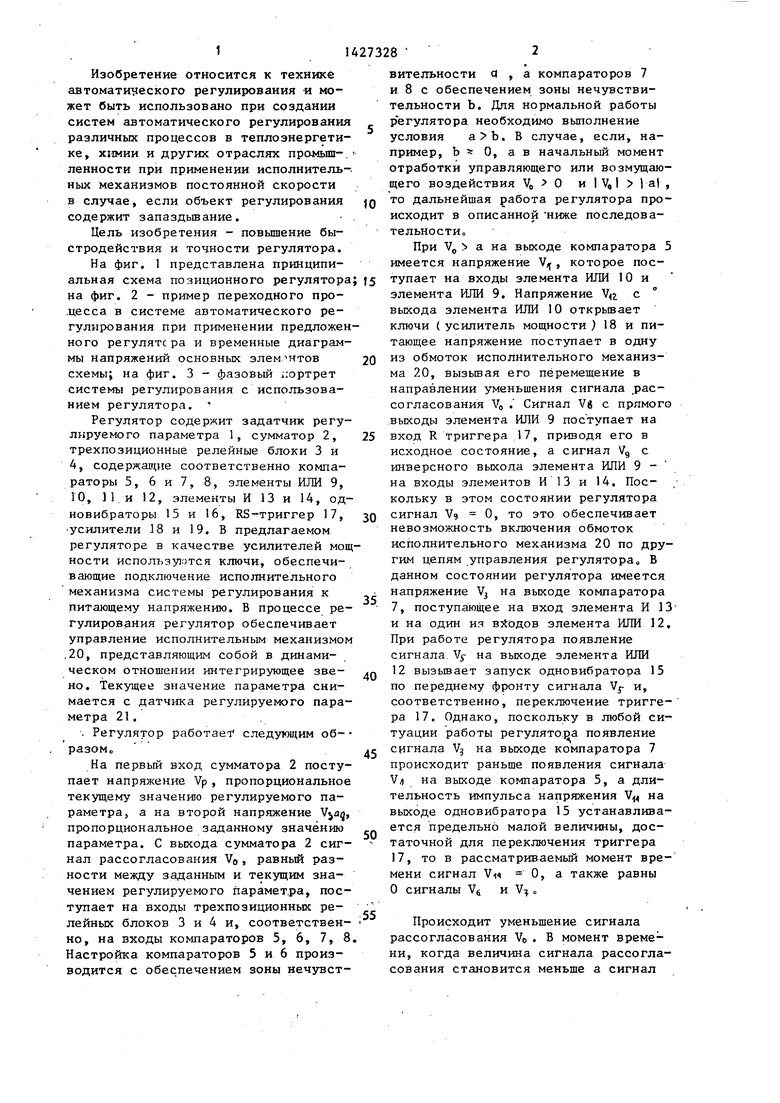

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Импульсно-релейный регулятор | 1984 |
|
SU1228072A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |


Изобретение относится к-технике автоматического регулирования и может быть использовано при создании систем автоматического регулирования различных технологических процессов при применении исполнительных механизмов постоянной скорости в случае, если объект регулирования имеет запаздьюание. Целью изобретения является повышение быстрюдействия и точности регулятора. Регулятор содержит задатчик 1 регулируемого параметра, сумматор 2, трехпозиционные релейные блоки 3 и 4, элементы ИЛИ 9, 10, 11, 12, элементы И 13 и 14, одно- вибраторы 15 и 16, Б8-триггер 17, усилители мощности 18 и 19, исполнительный механизм 20, датчик 21 регулируемого параметра. С помощью второго трехпозиционного релейного блока 4 обеспечивается повышение качества регулирования путем корректирзтощего включения регулятора до момента выхода сигнала рассогласования из зоны нечувствительности первого трехпозиционного блока 3„ Одновременно повышается надежность регулятора за счет снижения числа переключений исполнительного устройства. 3 ило ( (Л С
20
25
30
ние динамического инверсного гистерезиса в структуру регулятора, обеспечивающего высокое качество регулирования при меньшем количестве переключений исполнительного устройства.
Для исключения возможности существования автоколебаний внутри зоны нечувствительности компараторов 5 и 6 повторное срабатьшание одновибра- тора 16 возможно только поеле переключения триггера 17, т.е. после выхода из зоны нечувствительности d компараторов 5 и 6.
На фиг. 2 пунктиром представлен переходной процесс с применением регулятора-прототипа для объекта, описьюаемого передаточной функцией
WP -ттг тгт (О
35
где с становится меньше зоны нечувствитель- 15 торов,, 6 и 5. Это обеспечивает введе- ности компаратора 7, происходит пропадание сигнала Vj на его выходе. На фиг. 2 представлен процесс регулирования в случае, если b О, но имеет достаточно малую величину, которой можно пренебречь при анализе переходного процесса. При дальнейшем изменении регулируемого параметра в процессе отработки воздействия происходит изменение сигнала рассогласования по знаку и срабатьшание компаратора 8. На его выходе возникает напряжение V . При этом появляется напряжение Vy на выходе элемента ИЛИ 12, что вызьшает запуск одновибрато- ра 15 по переднему фронту сигнала V. Происходит переключение триггера 17 и сигнал Vg поступает на вход одно- вибратора 16, Одновибратор 16 запускается по переднему фронту сигнала V0- , Сигнал V с выхода одновибратора 16 длительностью У поступает на входы элементов И 13 и 14. Поскольку на всех входах элемента И 14 имеются единичные сигналы, то. на выходе элемента И 14 и соответственно на выходе элемента ИЛИ 11 возникают единичные сигналы V,Q и , Срабатывает усилитель мощности 19 и на обмотку исполнительного механизма 20 поступает управляющий импульс, вызывая его перемещение в направлении уменьшения сигнала рассогласования В-случае, если в течение корректирующего импульса произойдет срабатьюа- ние компаратора 6 при дальнейшем изменении сигнала рассогласования, то сигнал VIQ отключается, но движение исполнительного механизма в первоначальном направлении сохраняется из-за наличия сигнала Ve на входе элемента ИЛИ 11 В случае, если после окончания импульса не проис40
ТГ W
т -
45
частота чистого запаздьша- ния в системе (3 с); коэффициент передачи обьек- та (К О;
постоянная времени объекта (20 с) при оптимальных параметрах настройки регулятора прототипа и при ед1даич- ном воздействии регулятора. На фиг, 2 сплошной линией представлен процесс изменения сигнала рассогласования для дайного регуля-. тора. Из фиг. 2 видно, что при принятой настройке (Ь 0) данным регулятором обеспечивается повьш1ен- ное качество переходного процесса при меньшем количестве переключений.
На фиг. 3 представлены фазовые портреты для данного примера регуля- 55 тора ( сплопгаой годограф и регулятора прототипа (пунктирный годограф), наглядно иллюстрирующие уменьшение количества переключений.
50
ние динамического инверсного гистерезиса в структуру регулятора, обеспечивающего высокое качество регулирования при меньшем количестве переключений исполнительного устройства.
Для исключения возможности существования автоколебаний внутри зоны нечувствительности компараторов 5 и 6 повторное срабатьшание одновибра- тора 16 возможно только поеле переключения триггера 17, т.е. после выхода из зоны нечувствительности d компараторов 5 и 6.
На фиг. 2 пунктиром представлен переходной процесс с применением регулятора-прототипа для объекта, описьюаемого передаточной функцией
WP -ттг тгт (О
торов,, 6 и 5. Это обеспечивает введе-
35
15
где с торов,, 6 и 5. Это обеспечивает введе-
ТГ W
т -
частота чистого запаздьша- ния в системе (3 с); коэффициент передачи обьек- та (К О;
постоянная времени объекта (20 с) при оптимальных параметрах настройки регулятора прототипа и при ед1даич- ном воздействии регулятора. На фиг, 2 сплошной линией представлен процесс изменения сигнала рассогласования для дайного регуля-. тора. Из фиг. 2 видно, что при принятой настройке (Ь 0) данным регулятором обеспечивается повьш1ен- ное качество переходного процесса при меньшем количестве переключений.
На фиг. 3 представлены фазовые портреты для данного примера регуля- тора ( сплопгаой годограф и регулятора- прототипа (пунктирный годограф), наглядно иллюстрирующие уменьшение количества переключений.
Формула изобретения Позиционный регулятор для систем с запаздьшанием, содержащий задатчик регулируемого параметра, датчик регулируемого параметра, сумматор, первый трехпозиционный релейный блок два усилителя мощности, три элемента ИЛИ, два элемента И, первый одновиб- ратор, RS-триггер, причем выход за- датчика регулируемого параметра и . датчик регулируемого параметра подключены соответственно к суммирующему и вычитающему входам сумматора, подключенного выходом к входу перво- го трехпозициоиного релейного блока, первьй выход которого подключен к первому входу второго элемента ИЛИ и к первому входу первого элемента ИЛИ, второй вход которого соединен с вторым выходом трехпозиционного релейного блока и с первым входом третьего элемента ИЛИ, выход которого через второй усилитель мощности подключен к первому выходу регулято- ра, второй выход которот о подключен к выходу первого усилителя мощности, вход которого соединен с выходом вто рого элемента ИЛИ, второй вход которого подключен к выходу первого эле-
(/о
мента И, первый вход которого соединен с выходом первого одновибратора и с первым входом второго элемента И йодключенного выходом к второму входу третьего элемента ИЛИ, о т л и- чающ ийся тем, что, с целью повьпиения быстродействия и точности регулятора, в него дополнительно введены второй одновибратор, четвертый элемент ШТИ и второй трехпозиционный релейный блок, вход которого подключен к выходу сумматора, первый выход второго трёхпозиционного релейного блока подключен к второму входу первого элемента Инк первому входу четвертого элемента ИЛИ, второй вход которого соединен с вторым выходом второго трехпозициоиного релейного блока и с вторым входом второго элемента И, третий вход которого .соединен с третьим входом первого элемента И и с инверсным выходом первого элемента ИЛИ, прямой выход которого соединен с R-входом RS-три гера, подключенного выходом к входу первого одновибратора, а S-входом - к выходу второго одновибратора, вход которого соединен с выходом четвертого элемента ИЛИ,
.
| Авторское свидетельство СССР №-1200238, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
