ности при сканировании и при неподвижных датчиках, при этом входы блоков формирования значений массы и влажности при неподвижных датчиках связаны с вторыми выходами блоков переключателя режима, причем
Изобретение относится к целхсюлоз но-бумажному производству и может быть использовано для автоматического управления массой и влажностью листового материала.
Целью изобретения является повышение быстродействия и точности управления массой и влажностью.
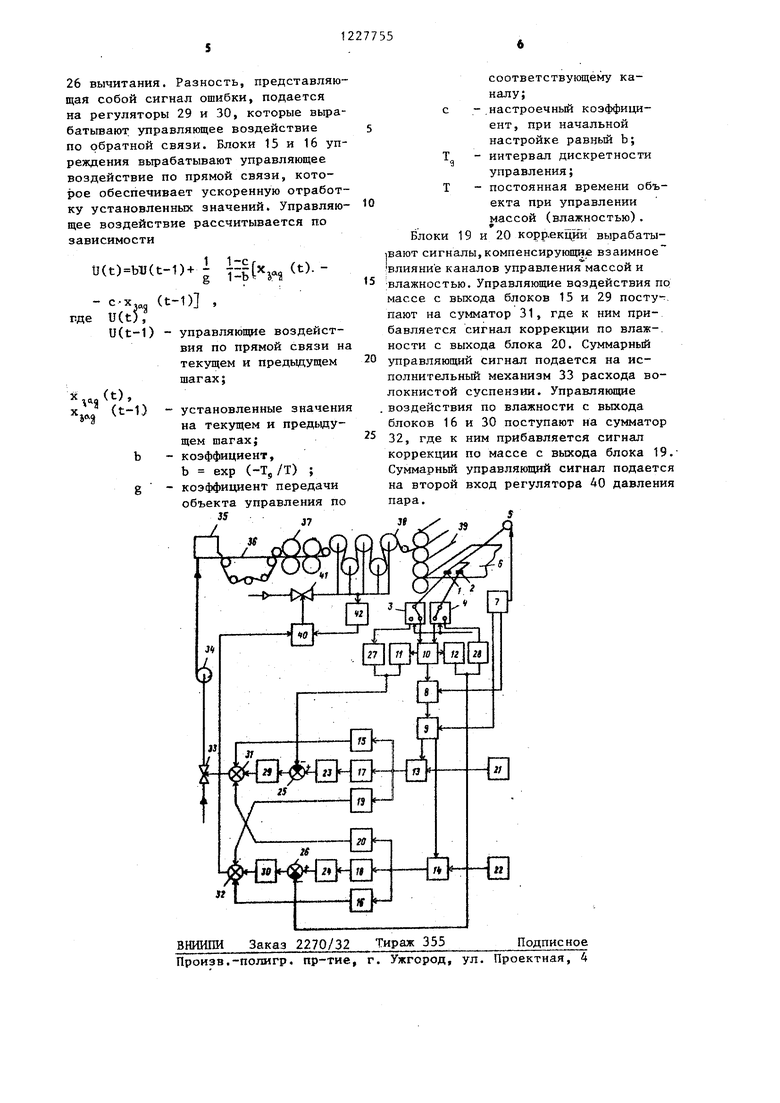
На чертеже представлена функциональная схема системы автоматичес- кого управления массой и влажностью дистового материала.
Система содержит датчики 1 и 2 массы и влажности листового материа ла, соединенные с соотве.тствующими блоками 3 и 4 переключения режима. Датчики 1 и 2 связаны с механизмом сканирования по ширине полотна 6. Блок 7 управления сканированием соедине н с входами блоков 3, 4 и 5 и с входами блоков 8 и 9 определения готовности профиля и обработки профиля соответственно. Выходы блоков 3 и 4 переключения режимов связаны через блок 10 формирования поперечного профиля с входами блоков 11 и 12 формирования значений массы и формирования значений влажности при сканировании, с блоком 8, связанным через блок 9 с блоками 13 и 14 расчета установленных значений массы и влажности. Входы блоков 13 и 14 соединены с входами соответственно блоков 15 и 16 упреждения, 17 и 18 задержки, 19 и 20 коррекции, а их |Входы связаны с задатчиком 21 и 22. Блоки 17 и 18 соединены через блоки 23 и 24 согласования с первыми входами блоков 25 и 26 вычитания, вто- рые входы которых связаны с выходам блоков 11 и 12 и блоков 27 и 28 формирования значений массы и влажности при неподвижных датчиках 1 и 2,
выходы блоков упреждения-соединены с третьими входами сумматоров, а выход второго сумматора связан с первым входом регулятора давления, второй вход которого соединен с датчиком давления пара.
5
О
j; 0 5 о
5
а их выходы соединены через регуляторы 29 и 30 с сумматорами 31 и 32. Блоки 27 и 28 связаны с соответствующими блоками 3 и 4 переключения режима. Выходы блоков 15, 16, 19 и 20 соединены соответственно с сумматорами 31 и 32. Выход сумматора 31 соединен с исполнительньм механизмом 33 расхода волокнистой суспензии, связанным через насос 34 с напорнВш ящяком 35 бумагоделательной машины, которая содержит сеточную 36, прессовую 37 и сушильную 38 части и каландр 39. Выход сумматора 32 соединен с входом регулятора 40 давления пара,, выход которого связан с исполнительным механизмом 41, а второй вход - с датчиком 42 давления пара в цилиндрах сушильной части 38.
Система работает следующим образом.
Волокнистая суспензия через смесительный насос 34 подается в напорный ящик 35, откуда она поступает на сетку 36 бумагоделательной машины. Бумалсное полотно 6 проходит через прессовую часть 37, сушильные цилиндры 38 и каландр 39. Датчики Т и 2 массы й 7влажности, установленные на сканере, перемещаются поперек полотна с помощью электропривода 5. Режим работы датчика Сканирование или Останов в точке по ширине полотна реализуется блоком 7 управления сканирования. Давление пара в сушильных цилиндрах 38 измеряется датчиком 42 и используется для регулирования расхода пара регулятором 40. Расход волокнистой суспензии регулируется с помощью исполнительного механизма 33. Сигналы с датчиков 1 и 2 массы и влажности поступают на блоки 3 и 4 переключения режима.
которые управляются блоком 7. В режиме Останов в точке по ширине полотна сигналы массы и влажности с датчиков 1 и 2 через блоки 3 и 4 поступают на соответствующие блоки 27 и 28 формирования значений массы влажности в.точке. В блоках 27 и 28 осуществляется цифровая фильтрация показаний датчика по формуле y(t)ay(t-1)-(-(1-a)-X(t),
где X(t) y(t), .y(t-1)
показания датчика массы (влажности) в момент t
текущие значения массы (влажности), сформиро- ванные в блоке 27 (28) в моменты t, t-1.
В момент работы датчиков 1 и 2 в режиме Сканирование сигналы с них 20 через блоки 3 и.4 поступают в блок 10 формирования профиля, в котором формируются поперечные профили массы и влажности. В блоке 10 хранится информация о поперечном профиле массы и 25 влажности, которая обновляется при поступлении каждого нового измерения с датчиков. Это позволяет на каждом шаге управления иметь информацию обо всем поперечном профиле. В блоках 11 зо и 12 формируются текущие значения массы и влажности по формуле
1 N / . I - С
y(t) Гх. ,
35
де y(t)
х
текущее значение массы (влажности) в момент времени t; массив поперечного профиля массы (влаж- 0 ности), накопленный к текущему моменту в блоке 10.
Блок 8 работает только в режиме Сканирование. Он определяет координату датчика по ширине полотна и выявляет момент окончания цикла сканирования. В этот момент он передаёт сформированные профили массы и влажности из блока 10 в блок 9 обработки профиля. В блоке 9 определяется наименьшая по ширине полотна масса и наибольшая влажность, а также вычисляется среднеквадратическое отклонение каждого профиля. Эти вели чины поступают ДЛЯ вычисления установленных значений по массе и влажto
15
20 25зо
5
0
55
ности в блоки 13 и 14, где осуществляется расчет по формуле
V V. .
- установленное значение по
где X
-gon
массе (влажности); минимально (максимально) допустимая масса (влажность), взятая из задат- чика 21 массы (22 влажности) .
Величина Д определяется в блоке 9 в зависимости от режима работы датчика. В режиме Останов в точке по ширине полотна
-Х,,
где X. - значение массы (влажности) в точке останова датчика, взятое из поперечного профиля;
Х - минимальное (максимальное) значение массы (влажности) по ширине полотна.
В режиме сканирования , где 6 - среднеквадратическое отЮТонение массы (влажности).
Сигналы с блоков 13 и 14 поступают на соответствующие блоки 15 - 20. Блоки 17 и 18 задержки организуют задержку установленных значений, т.е. У,„ (t) xj, (t-t),
выход блока задержки в момент времени t; установленное значение по массе (влажности) в момент t-L. Время запаздьшания t равно транспортному запаздыванию в объекте по соответствующему каналу управления. С блоков 17 и 18 сигнал поступает на блоки 23 и 24 согласования, которые осуществляют преобразование установ- пенных значений по формуле
Z(t)bZ(t-1)+(1-b).y(t-1), где Z(t), Z(t-1) - выходы блока согласования в текущий и предьщущий моменты;
у(t-1) - выход блока задержки в предыдущий момент;
b ехр (-Тд/Т),
где Т„ - интервал дискретности управления;
Т - постоянная времени объекта при управлении массой (влаж ностью).
Сигналы ,с блоков 23 и 24 поступают на соответствующие блоки 25 и
Я Г
xj,;(t-n
26 вычитания. Разность, представляющая собой сигнал ошибки, подается на регуляторы 29 и 30, которые вьфа- батьтают управляющее воздействие по обратной связи. Блоки 15 и 16 упреждения вырабатывают управляющее воздействие по прямой связи, которое обеспечивает ускоренную отработку установленных значений. Управляющее воздействие рассчитывается по зависимости
tJ(t)bTJ(t-1)+ i . (t). - с-х (t-1) ,
u(t5,
и(t-1) - управляющие воздействия по прямой связи на текущем и предьщущем шагах;
где
,./t).
t-1)
-установленные значения на текущем и предьзду- щем шагах;
-коэффициент,
b вхр (-Т.,/Т) ;
-коэффициент передачи объекта управления по
55
0
соответствующему каналу;
; - .настроечньш коэффициент, при начальной настройке равньй Ь;
-интервал дискретности управления;
-постоянная времени объекта при управлении массой (влажностью).
Блоки 19 и 20 корр.екции вырабаты- |вают сигналы,компенсирующие взаимное влияние каналов управления массой и 5 ;влажностью. Управляющие воздействия по массе с выхода блоков 15 и 29 посту-;, пают на сумматор 31, где к ним прибавляется сигнал коррекции по влаж-. ности с выхода блока 20. Суммарный управляющий сигнал подается на исполнительный механизм 33 расхода волокнистой суспензии. Управляющие воздействия по влажности с выхода блоков 16 и 30 поступают на сумматор 32, где к ним прибавляется сигнал коррекции по массе с выхода блока 19.- Суммарный управляющий сигнал подается на второй вход регулятора 40 давления пара.
5
0
ВНИИПИ Заказ 2270/32 Тираж 355
Подпис нов
Произв.-полигр, пр-тие, г. Ужгород, ул. Проектная, 4
Подпис нов
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления массой и влажностью бумажного полотна | 1980 |
|
SU987001A1 |
| Способ автоматического управления бумагоделательной машиной | 1987 |
|
SU1557231A1 |
| Система независимого автоматического управления массой квадратного метра и влажностью бумажного волокна | 1985 |
|
SU1300060A1 |
| Устройство автоматического регулирования температуро-влажностного режима в процессе сушки колбасных изделий | 1988 |
|
SU1602423A1 |
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| Система автоматического регулирования процесса сушки кормов | 1982 |
|
SU1044930A1 |
| Способ автоматического управления массой 1 @ и влажностью картонного полотна | 1984 |
|
SU1270197A1 |
| Система автоматического управления режимом сушки | 1981 |
|
SU954750A1 |
| Устройство для регулирования влажности бумажного полотна | 1973 |
|
SU441376A1 |
| Устройство для автоматического регулирования технологического параметра,преимущественно влажности бумажного полотна | 1986 |
|
SU1416582A1 |
| Патент США № 3847730, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система автоматического управления массой и влажностью бумажного полотна | 1980 |
|
SU987001A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
