Изобретение относится к устройствам автоматического упрявления и может бЫть использовано в системах автоматического управления регулирования нестационарными объектами при наличии быстро изменяющихся мультипликативных помех.
Цель изобретения - повьппение точности регулирования в условиях быстр изменяющейся мультипликативной по- мехи.
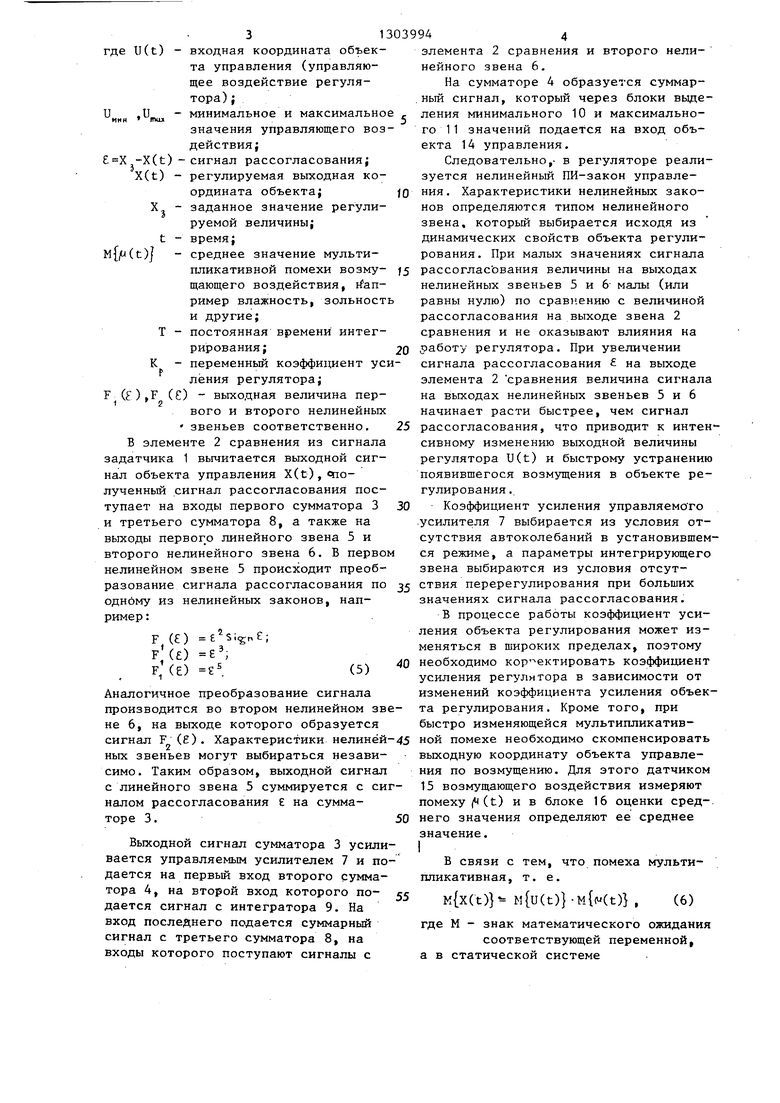
На фиг.1 представлена структурная схема устройства; на фиг,2 - структурная схема объекта управления.
Устройство содержит задатчик 1, элемент 2 сравнения, первый 3 и вто- р.ой 4 сумматоры, первое 5 и второе 6 нелинейные звенья, управляемый усилитель 7, третий сумматор 8, интегратор 9, блоки вьщеления минимального 10 и максимального 11 значений с подключенными к ним задатчиками нижней 12 и верхней 13 границ управляющего воздействия, объект 14 управления, датчик 15 контролируемой мультипликативной помехи, блок 16 оценки среднего значения и блок 17 деления. Объект управления содержит (фиг,2) последовательно соединенные умножитель 18 и динамическое звено 19.
Задатчик через последовательно соединенные элемент 2 сравнения, первое нелинейное звено 5, первый сумматор 3, управляемый усилитель 7, второй сумматор 4, блоки выделения минимального 10 и максимального 11 значений и объект 14 управления подключен к второму входу элемента 2 сравнения, выход которого через последовательно соединенные второе нелиней- ное звено 6, третий сумматор 8 и интегратор 9 подключен к второму входу второго сумматора 4, выход элемента 2 сравнения подключен также к вторым входам первого 3 и третьего 8 сумма- торов, выход задатчика соединен с первым входом блока 17 деления, выход которого подключен к третьему входу второго сумматора 4, выход датчика 15 контролируемой мультипликативной по- мехи через блок 16 оценки среднего значения подключен к второму входу блока 17 деления и к управляющему входу управляемого усилителя 7.
В качестве датчика 15 контролируе- мой мультипликативной помехи j(t) может быть использован, например, серийно выпускаемый датчик влажности ВАК-4. Блок 16 оценки среднего значе
5
13039942
ния реализуется известными техническими средствами.
Устройство работает следующим образом,
5 Объект 14 управления для промышленных технологических процессов хорошо аппроксимируется передаточной функцивида
-СР
и(Р) - .ё
:Е.РЛ
(1)
К ,- - коэффициент усиления объекта
oS
14 управления, K,M((t)};
(2)
Ргто
мI
оператор Лапласа; время транспортного запазды- вания;
постоянная времени объекта управления;
символ математического ожидания .
При теоретическом синтезе управления такими объект эми их инерционностью, как правило, не учитывают и рас- сматривают только в статике, что
позволяет получить субоптимальные алгоритмы, которые затем дополняют звеньями, учитывающими инерционность объектов управления. Однако эти подходы не учитывают динамические особенности объектов управления.
В известном нелинейном адаптивном регуляторе, когда мультипликативное возмущение /t((t) изменяется медленно по сравнению с динамическими характеристиками объекта, величина |t вычисляется косвенно путем вычисления M{u(t) и определения от- нощения
К
(Ц
(3)
Если (t) изменяется быстрее,чем регулятор успевает ее вычислить , т в этом случае коэффициент усиления регулятора не успевает отслеживать эти изменения, что может привести появлению автоколебаний или весьма длительному процессу регулирования Б данном регуляторе реализуется следующий закон управления:
1 Т
) Ги аксПРИ U(t) . U(t) { U(t) при (t) U
U(t)
Кр( F
(О) + S(E + (4)
и.
при U(t) i и
где U(t) - входная координата объекта управления (управляющее воздействие регулятора) ;
и ,и
ИНН 1
ij - минимальное и максимально
значения управляющего воздействия;
Х -X(t) -сигнал рассогласования; X(t) - регулируемая выходная координата объекта; X - заданное значение регулируемой величины; t - время;
M{|4(t) - среднее значение мультипликативной помехи возму- щающего воздействия, rfan- ример влажность, зольност и другие;
Т - постоянная времени интегрирования;К - переменный коэффициент усления регулятора;
F (j ),F (С) - выходная величина первого и второго нелинейных звеньев соответственно, В элементе 2 сравнения из сигнала задатчика 1 вычитается выходной сигнал объекта управления X(t),«полученный сигнал рассогласования поступает на входы первого сумматора 3 и третьего сумматора 8, а также на выходы первог о линейного звена 5 и второго нелинейного звена 6. В перво нелинейном звене 5 происходит преобразование сигнала рассогласования по однбму из нелинейных законов, например :
F () ;() е ;
F, (Е) .
(5)
Аналогичное преобразование сигнала производится во втором нелинейном звене 6, на выходе которого образуется сигнал F (Е). Характеристики нелинёй-45 ных звеньев могут выбираться независимо. Таким образом, выходной сигнал с линейного звена 5 суммируется с сигналом рассогласования на сумматоре 3.50
Выходной сигнал сумматора 3 усиливается управляемым усилителем 7 и подается на первый вход второго сумматора 4, на второй вход которого по- 55 дается сигнал с интегратора 9. На вход последнего подается суммарный сигнал с третьего сумматора 8, на входы которого поступают сигналы с
,
f
0 50 5
0
50
5
элемента 2 сравнения и второго нелинейного звена 6.
На сумматоре 4 образуется суммар- .ный сигнал, который через блоки выделения минимального 10 и максимального 1 1 значений подается на вход объекта 14 управления.
Следовательно,- в регуляторе реализуется нелинейньй ПИ-закон управления. Характеристики нелинейных законов определяются типом нелинейного звена, который выбирается исходя из динамических свойств объекта регулирования. При малых значениях сигнала рассоглас ования величины на выходах нелинейных звеньев 5 и 6- малы (или равны нулю) по сравнению с величиной рассогласования на выходе звена 2 сравнения и не оказывают влияния на работу регулятора. При увеличении сигнала рассогласования на выходе элемента 2 сравнения величина сигнала на выходах нелинейных звеньев 5 и 6 начинает расти быстрее, чем сигнал рассогласования, что приводит к интенсивному изменению выходной величины регулятора U(t) и быстрому устранению появившегося возмущения в объекте регулирования .
Коэффициент усиления управляемого усилителя 7 выбирается из условия отсутствия автоколебаний в установившемся режиме, а параметры интегрирующего звена выбираются из условия отсутствия перерегулирования при больших значениях сигнала рассогласования.
В процессе работы коэффициент усиления объекта регулирования может изменяться в широких пределах, поэтому необходимо кор ектировать коэффициент усиления регулитора в зависимости от изменений коэффициента усиления объекта регулирования. Кроме того, при быстро изменяющейся мультипликативной помехе необходимо скомпенсировать выходную координату объекта управления по возмущению. Для этого датчиком 15 возмущающего воздействия измеряют помеху ((t) и в блоке 16 оценки сред-, него значения определяют ее среднее значение.
в связи с тем, что помеха мультипликативная, т. е.
K(x(t) (t)}-M{Kt)} , (6)
где М - знак математического ожидания
соответствующей переменной, а в статической системе
K{x(t)|
поэтому
M{f(t)}
3(7)
К
об
(8)
X
M(U(t)
где К с - коэффициент усиления объекта
Выходной сигнал с блока 16 оценки среднего значения подается на управляющий вход управляемого усилителя 7 и изменяет его коэффициент усиления таким образом, что большему значению коэффициента усиления объекта регулирования соответствует меньший коэффи- 1щент усиления регулятора (усилителя 7) и наоборот, т.е.
К - К„,- К„ , (9)
где К - коэффициент усиления разомкнутой системы регулирования.
Такая коррекция коэффициента усиления регулятора позволяет поддерживать высокую точность работы регулятора при широком диапазоне изменений
20 Технико-экономическим преимуще твом данного регулятора является более высокая точность управления счет того, что измеряется возмущаю щее воздействие (помеха) /Ч (t) дат
коэффициента усиления объекта регули-25 ком 15 и определяется его среднее
рования. Это позволяет избегать автоколебаний в установившемся режиме,
Благодаря включению интегратора 9 в разрыв цепи между элементом 2 сравзначение в блоке 16, по которому ректируется коэффициент усиления гулятора Кр (усилитель 7), что по воляет с упреждением (по возмущен
значение в блоке 16, по которому корректируется коэффициент усиления регулятора Кр (усилитель 7), что позволяет с упреждением (по возмущению)
нения и сумматором 8 время интегриро- о изменить коэффициент усиления регулявания не зависит от начальных условии следовательно, время адаптации не зависит от величины сигнала на выходе блока 16 оценки ср еднего значения в момент t О, равного м{|Ч(о)} . Это обеспечивает снижение времени адаптации коэффициента усиления, что ведет к повьшению точности регулирования.
Выходной сигнал блока 17 деления, равный
и,
,(t)J
(10)
подается на третий вход второго сумматора 4 и, соответственно, по возму- щению изменяет величину сигнала U управляющего воздействия.
Таким образом, помеха ((t) (возмущающее воздействие) компенсируется по возмущению (по прямому каналу) сигналом с выхода блока 17 деления, а по отклонению устраняется влияние шумов и других неконтролируемых изменений в объекте сигналом с выходов интегратора 9 и усилителя 7.
При автоматическом регулировании реальных промьгашенных объектов имеется необходимость в ограничениях управляющего воздействия, причем вели
39946
чина ограничения может изменяться в зависимости от условий работы, режима и т.п. (например., при автоматизации сушильных установок на углеобога тйтельных фабриках необходимо строго ограничивать температуру сушильного агента во избежание взрыва, пережога и т.п., а также следить за нижним пределом температуры, не допуская ее
fO снижения до температуры точки росы во избежание выпадания влаги. Наличие блоков выделения минимального 10 и максимального 11 значений управляющего воздействия с соответствующими
15 задатчиками 12 и 13 обеспечивают ограничение управляющего воздействия в заданных границах, что повьпдает точность и надежность регулирования.
Технико-экономическим преимуществом данного регулятора является более высокая точность управления за счет того, что измеряется возмущающее воздействие (помеха) /Ч (t) датчиком 15 и определяется его среднее
значение в блоке 16, по которому корректируется коэффициент усиления регулятора Кр (усилитель 7), что позволяет с упреждением (по возмущению)
изменить коэффициент усиления регулятора, а также предотвратить появление автоколебаний и большие времена регулирования при быстро меняющихся мультипликативных возмущающих воздейс.тви- ях (помехах); более высокая точность управления за счет того, что по измеренному среднему значению (t)} определяется на блоке 17 деления сос - тавляющая величины управляющего воздействия и по возмущению, т.е. регу0
0
5
, по возмущению, лятор представляет собой комбинацию управляющих воздействий по отклонению и по возмущению, что увеличивает точность регулирования при быстро изменяющихся возмущающих воздействиях.
Ф ормула изобретения
Нелинейный адаптивный регулятор, содержащий задатчик, выход которого через последовательно соединенные . элемент сравненргя, первое нелинейное звено, первый сз мматор, управляемый
усилитель, второй сумматор, блок 5 выделения минимального значения, блок выделения максимального значения и объект управления подключен к второму входу элемента сравнения, выход кото- poi o через последовательно соединенное второе нелинейное звено, третий сумматор и интегратор подключен к второму входу второго сумматора, выход элемента сравнения также подключен к вторым входам первого и третье го сумматоров, выход задатчика соеди нен с первым входом блока деления, второй вход которого соединен с выходом блока оценки среднего значения, а вторые входы блоков вьщеления мини мального и максимального значений
3039948
подключены соответственно к задатчи- кам нижней и верхней границ управляющего воздействия, отличающий- с я тем, что, с целью .повьшения точ- 5 ности регулирования, введен датчик контролируемой мультипликативной помехи, выход которого через блок оценки среднего значения соединен с управляющим входом управляемого усилителя,
to а выход блока деления соединен с третьим входом второго сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный адаптивный регулятор | 1983 |
|
SU1187148A1 |
| Нелинейный адаптивный регулятор | 1986 |
|
SU1374177A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| Система с переменной структурой | 1985 |
|
SU1322230A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
Изобретение относится к устройствам автоматического управления и может быть использовано в системах автоматического регулирования нестационарными объектами при наличии быстро изменяющихся мультипликативных помех. Щель изобретения - повышение точности регулирования. Достижение цели обусловлено тем, что изменяется контролируемая мультипликативная помеха и определяется ее среднее значение, по которому корректируется коэффициент усиления регулятора. Это позволяет с упреждением (по возмуш;ению). изменять настройку регулятора, предотвратить появление автоколебаний и уменьшить время регулирования. Устройство содержит задатчик 1, элемент 2 сравнения, нелинейные звенья 5,6, сумматоры 3,4,8, управляемый усилитель 7, интегратор 9, блоки выделения минималь- § ного 10 и максимального 11 значений с подключенными к ним задатчиками 12, 13, объект 14 управления, датчик 15 контролируемой мультипликативной помехи, блок 16 оценки среднего значения и блок 17 «деления. 2 ил.. (Л со о со со со 4 
и
x/ij;
Редактор М.Петрова
Составитель В.Пешков Техред И.Попович
Заказ И 310/48
да
Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие.г ужгородГул проёктна ГГ
Фиг. г
Корректор С.Шекмар
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шаталов А.С | |||
| Структурные методы теории управления и электроавтоматики | |||
| - Л.: Госэнергоиздат, 1962, с | |||
| Микрофонно-телефонно-катодный усилитель | 1923 |
|
SU408A1 |
| Нелинейный адаптивный регулятор | 1983 |
|
SU1187148A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
