Изс- бретение относктся к гориоьгу делу; конкретно к механизированным квепям очистных забоев,
Целью изобретения ятишется повышение боковой устойчивости крепи; удес ланке еа от сползания и снижение нагрузки на лазный конвейер на пластах ттакяокног о падения
На фкг , 1 изображе 5ьз секции механизированной крепи, HEi передви1 утые к конвейеру, в плане (перекрытия и
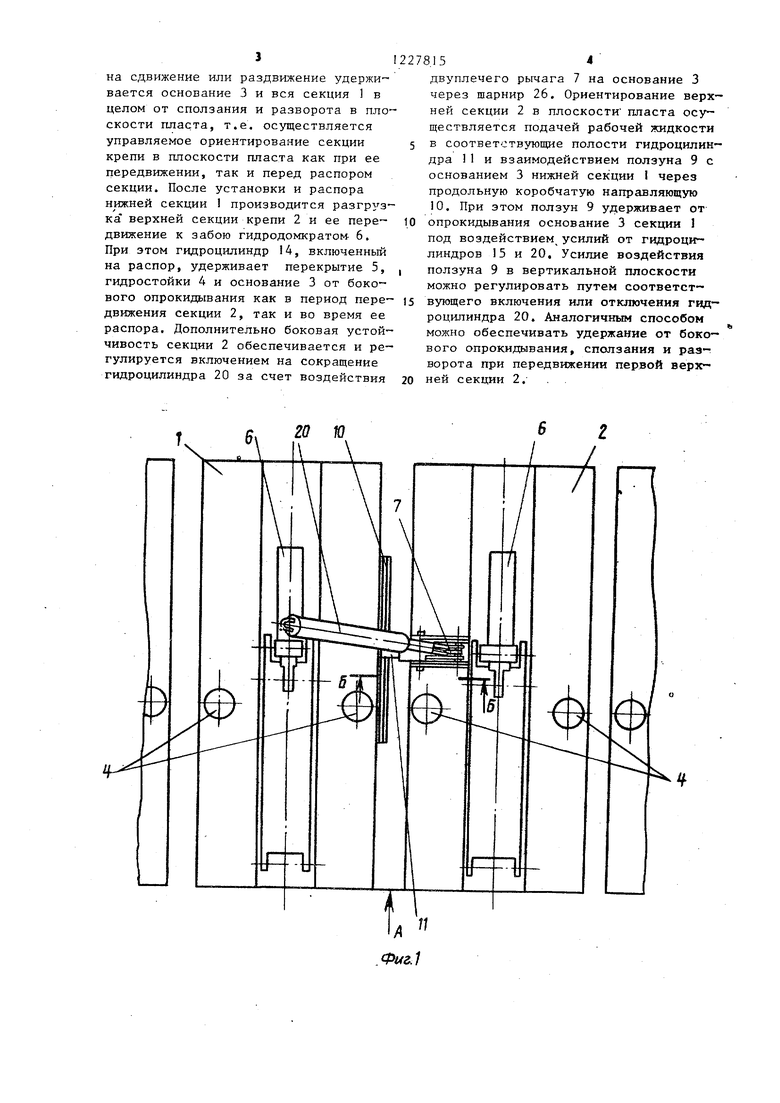
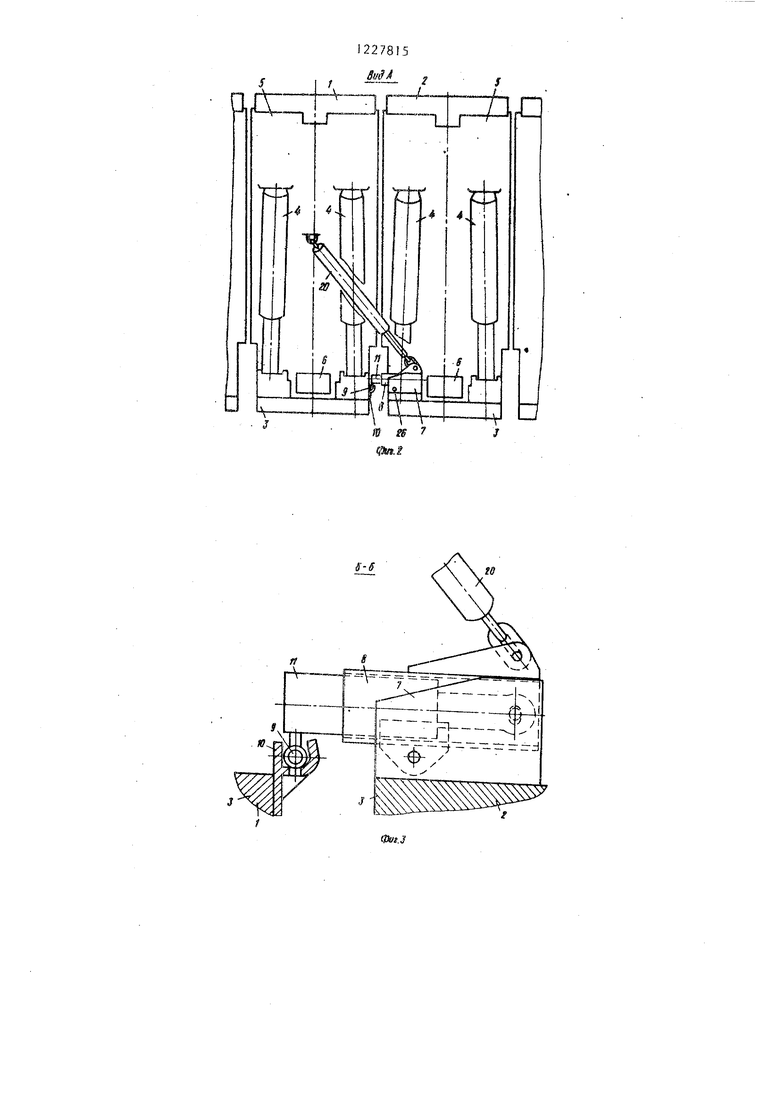
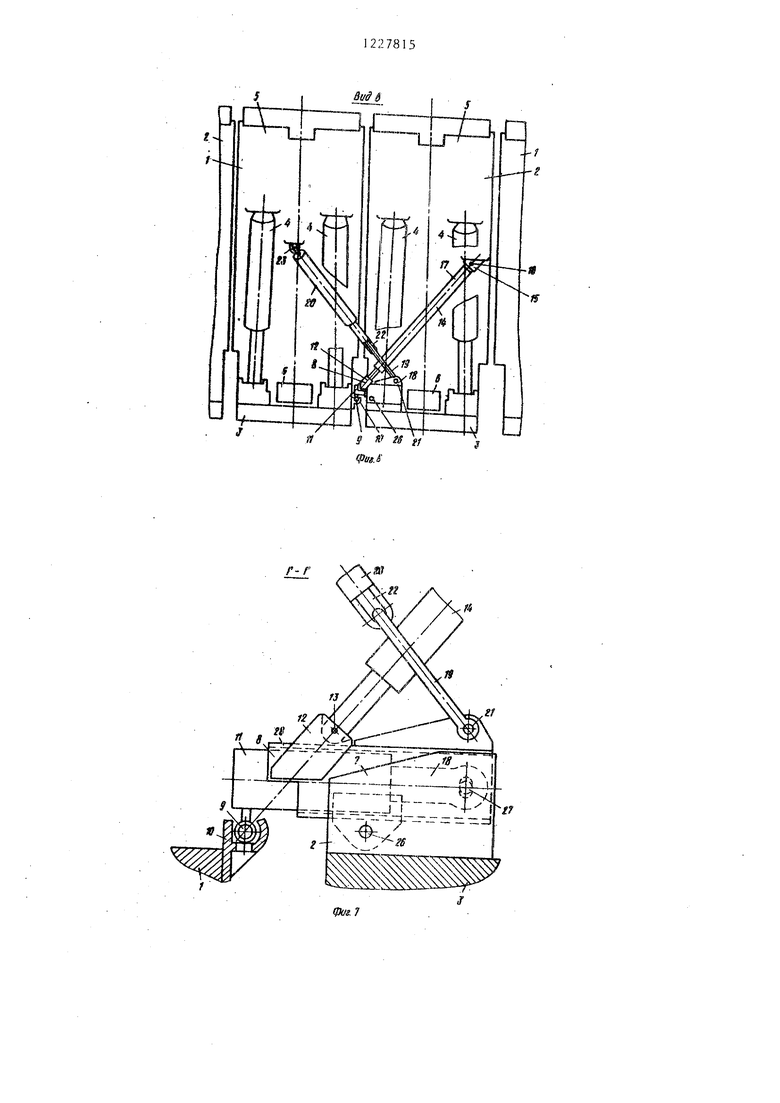
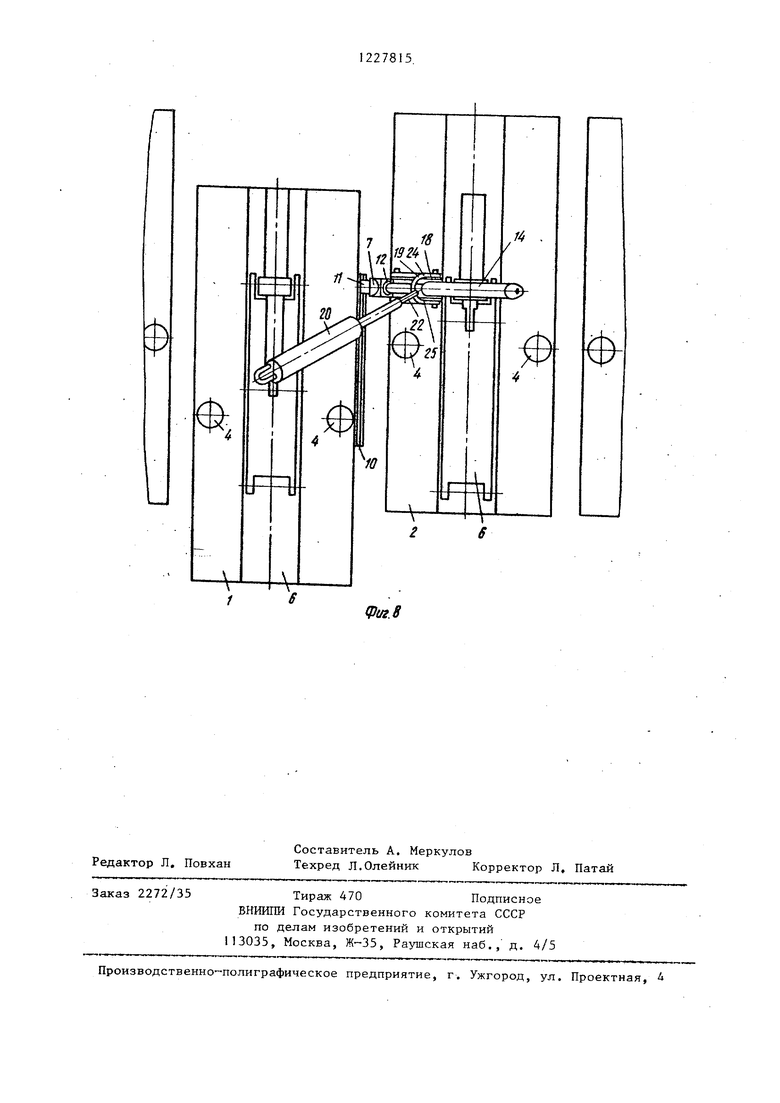
лавньпч конвейер условно не показаны) на фиг, ; - вид, А на фиг, 1 (}зид крепн со стороны забоя., конвейе условно не показан); на фиг, 3 - разрез Б-Б на фиг о 1 (перекрытия условно не показаны); на фиг, 4 - механи-- зйрованная крепь с передвинутой к конвейеру нг-скнер линейной секцией крепм до передвижения вьшестоящей секции3 в плане (перекрытия и кон- ветлер условно не показаны) | на фиг., 5- секции меканизированной крепи с дополнительной гидростойкой 3 не передвинутые к конвейеру, в плане (перекрытия и .павный конвейер условно не показаны) на фиг 6 - вид В на фиг 5 (вид крепи со стороны забоя, конвейер условно ке о6означе-н);. на фиГ:, 7 - разрез Г-Г на фиг, 5 (перекрытия условно не показаны); на фпг. 8 -- механизированная креп;ь с передзикутой к конвейеру нижней ли- нейной секцией крепи до передвижения вышестоящей секции в плане (пере- крытик и конвейер условно на показа- mi) ,.
Механизированная крепь образована отдельньП Ш объединенными в группы ли- кейньпчи секщгями, причем кагздая груп- п имеет ннлснюго 1 и верхнюю 2 отио- ситапьно падения пласта линейньш секции,- Каждая линейная секция состоит КЗ основания 3,, гидростоек . перекрытия .; и гидродоккратов передвижения 6s Объединение з группу ликейщ; х секций I и 2 исуп ествлепо двуплечим рычагом 7 эодно плечо 8ко1 орого рез ползун у кинематически связано с продольной к а пр являющей., выполненной в заде коробчатого желоба 10 на основании 3 нюкней секции J „ Причем пол-- зун 9 закреплен на управляемом г идро- цилиндре П, встроенном в рычаг 7„ и эдновременно на плече 3 установлена эпора 12. с которой горизонтальным шарниром 13 соединен оди: конец уп- равляемо.го гидродилл:ндрз i (-, Через
0
0
4
8152
опору 15 и горизонтальный шарнир 16 второй конец 17 этого гидроцилиндра 14 соединен с перекрытием 5 верхней секции 2. Плечо 18 постоянной длины рычага 7 посредством дугообразного кронштейна; выполненного в виде и-об- разной вилки 19, управляемого гидро- цшшндра 20 и шарниров 21-23, связано с перекрытием 5 нижней секции 1. При этом гидроц адиндр 14 размещен с возможностью перемещения между боко вьши сторонами 24 и 25 U-образной вилки 19s которые горизонтальными шарнирами 21 соединены с плечом 18 рычага 7, В результате достигнуто X- образное соединение гидроцилиндров 14 и 20 соответственно с перекрытиями 5 ш-ганей I и верхней 2 секций крепи и с н.печами 8 и 18 двуплечего рычага с
возможностью независимого силового воздействия на секции крепи как во время их передвижения, так и при их распоре. Двуплечий рычаг 7 горизонтальным шарниром 26 закреплен на основании 3 верхней секции 2. Гидроци линдр 11 с рычагом 7 связан посредством шарнира 27 и ограничен от боковых смещений и нагрузок направляющей 28. При этом гидроцилиндр 11 может перемещаться только поступательно, изме няя длину ппеча 8 рычага 7. ,
Механизированная крепь работает следующим образом.
В исходном положении гидростойки 4 сеюдий крепи I и 2 в каждой группе находятся под воздействием горного давления, а группы секций рдсположе- ны в непередвинутом состоянии относительно конвейера. Передвижение сек- -дни крепи обычно начинается с нижней секции: 1 . Для этого снимается распор в гидростойках 4, включаются на со- краа1;ение гидроцилиндр 20 и по мере необходимости на распор гидроцилиндр
4
и одновременно или поэтапно осуществляется передвижение секции крепи ; гидродомкратом 6. При этом гидроци- линдр 20 удерживает перекрытие 5, гидростойки 4 и частично всю секцию 1 от опрокидывания. В этот же период за счет воздействия гидроцилиндра 14 и дополнительного усилия, в.случае леобходимости., от гидроцилиндра 20 двугншчий рычаг 7 через ползун 9 и лродо.пьную коробчатую направляющ то 10 удерживает основание 3 и частично нею секцию 1 от опрокидывания. В это ке время включением гидроцилиндра 1
на сдвижение или раздвижение удерживается основание 3 и вся секция 1 в целом от сползания и разворота в пло скости пласта, т.е. осуществляется управляемое ориентирование секции крепи в плоскости пласта как при ее передвижении, так и перед распором секции. После установки и распора нижней секции производится разгруз ка верхней секции крепи 2 и ее передвижение к забою гидродомкратом- 6, При этом гидроцилиндр 14, включенный на распор, удерживает перекрытие 5, гидростойки 4 и основание 3 от бокового опрокидывания как в период пере движения секции 2, так и во время ее распора. Дополнительно боковая устой чивость секции 2 обеспечивается и регулируется включением на сокращение гидроцилиндра 20 за счет воздействия
2278.15
двуплечего рычага 7 на основание 3 через шарнир 26. Ориентирование верхней секции 2 в плоскости пласта осуществляется подачей рабочей жидкости 5 в соответствзтощие полости гидроцилин- дра 11 и взаимодействием ползуна 9 с основанием 3 нижней секции I через продольную коробчатую направляющую 10. При этом ползун 9 удерживает от
10 опрокидывания основание 3 секции 1 под воздействием,усилий от гидроци линдров 15 и 20. Усилие воздействия
I ползуна 9 в вертикальной плоскости
можно регулировать путем соответст- 15 вугощего включения или отключения гидроцилиндра 20. Аналогичным способом можно обеспечивать удержание от бокового опрокидывания, сползания и раз ворота при передвижении первой верх20 ней секции 2.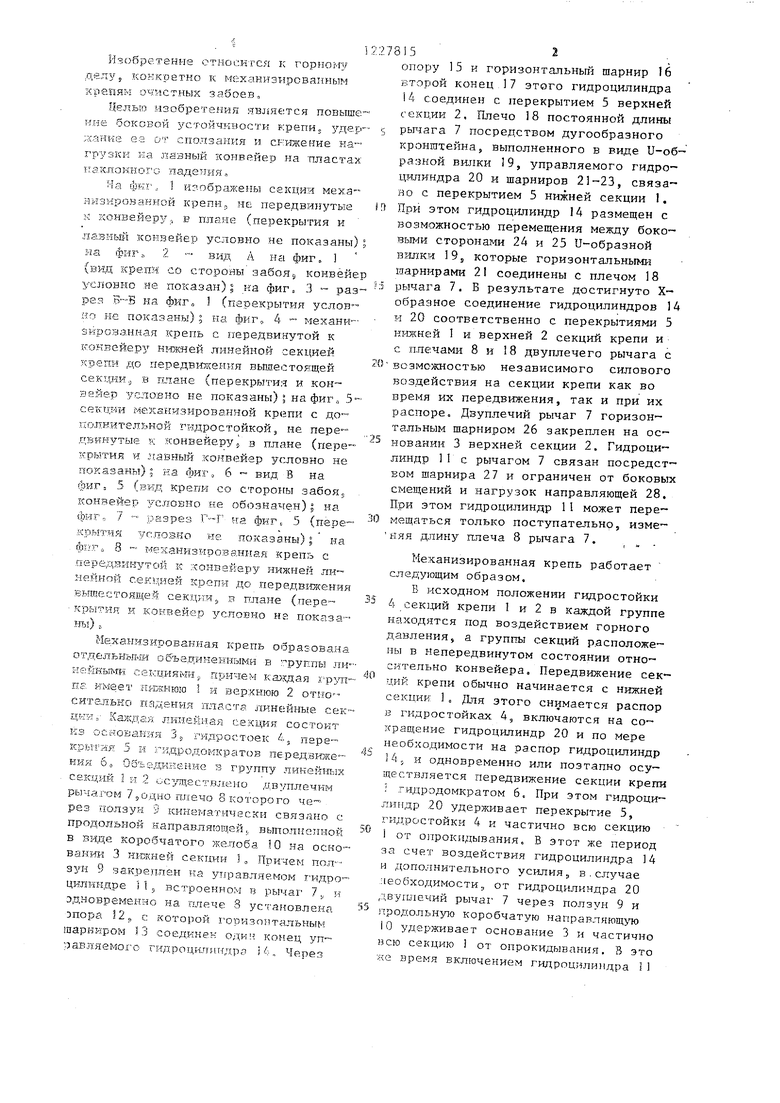
| название | год | авторы | номер документа |
|---|---|---|---|
| Концевая секция механизированной крепи | 1983 |
|
SU1086180A1 |
| Концевая секция механизированнойКРЕпи | 1979 |
|
SU817265A1 |
| Устройство для соединения опорных элементов секций крепи | 1990 |
|
SU1761963A1 |
| Механизированная шахтная крепь | 1981 |
|
SU1015076A1 |
| Механизированная крепь | 1981 |
|
SU976094A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Секция механизированной крепи | 1981 |
|
SU968448A1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| Секция механизированной крепи | 1988 |
|
SU1574825A1 |
4
y-6
го
S 1
Фиг.4
S г
ftS tS gi
(ag.S
F-r
gf
Фиг. В
Редактор Л, Повхан
Составитель А. Меркулов
Техред Л.Олейник Корректор Л, Патай
Заказ 2272/35
Тираж 470Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Механизированная крепь | 1968 |
|
SU276874A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ СЕКЦИИ | 0 |
|
SU373423A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
