Изобретение относится к горному делу, а именно к крепям механизированных комплексов для выемки угля на тонких пластах с неустойчивой кровлей.
Целью изобретения является уменьшение габаритов при повышении надежности работы за счет удаления породной и угольной мелочи из рабочего пространства крепи, предназначенного для перемещения людей.
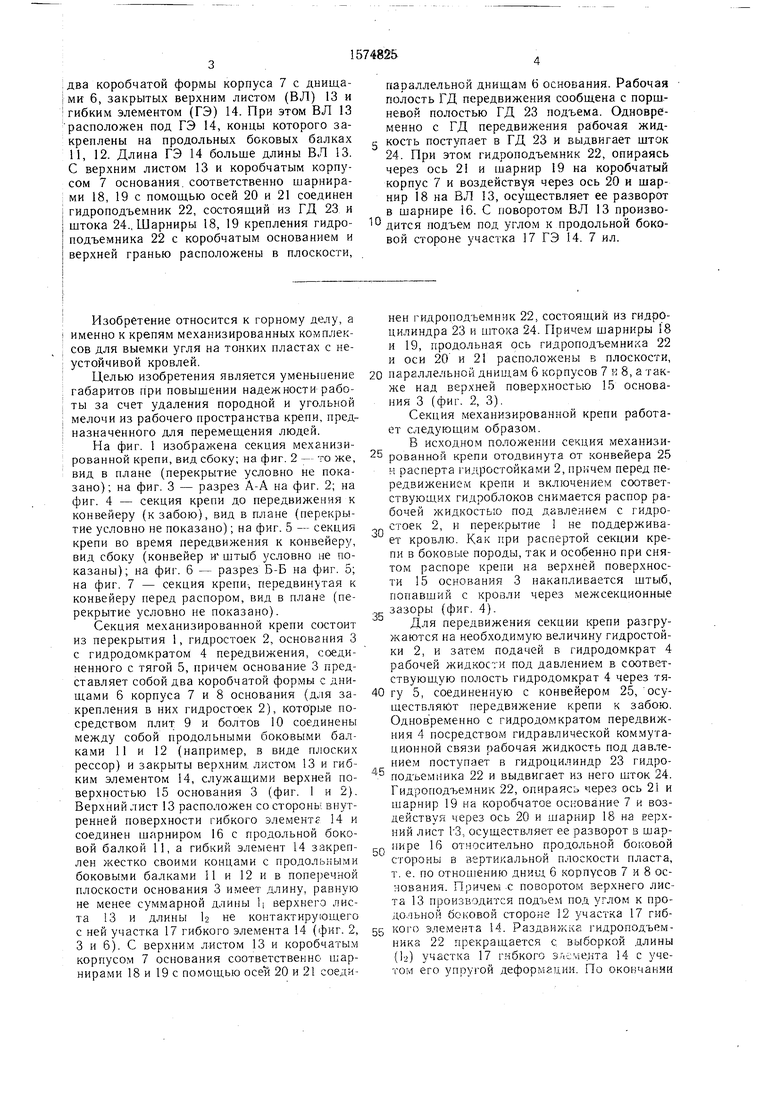
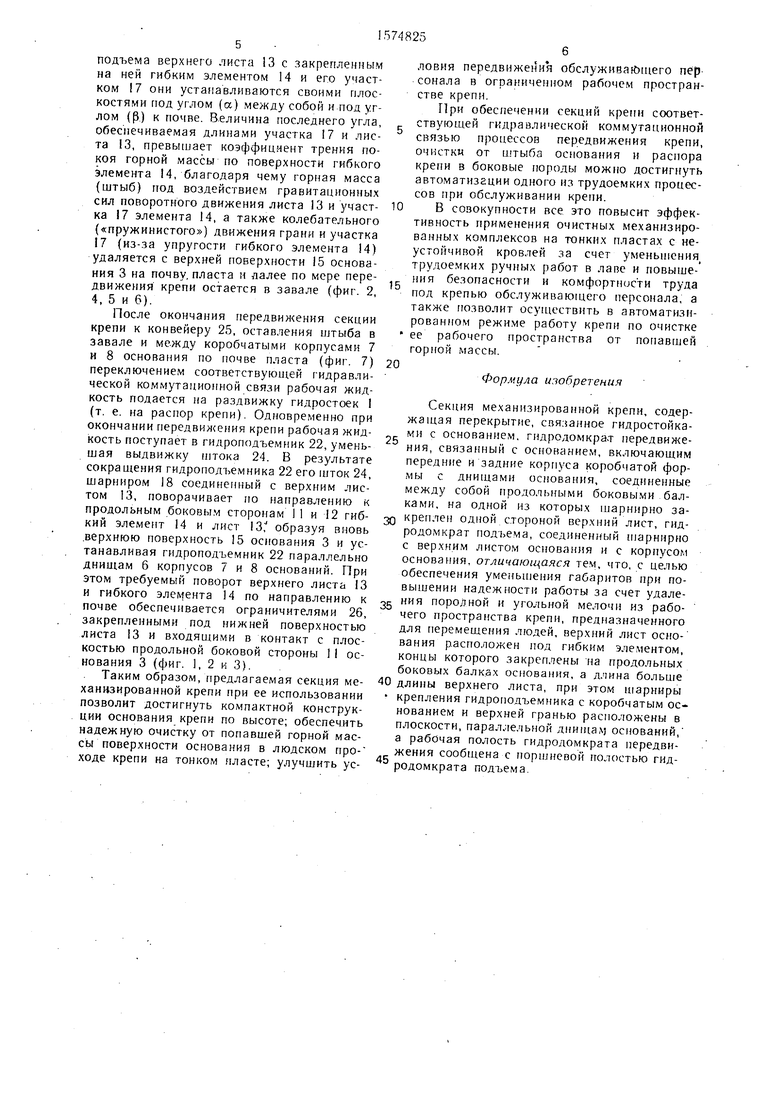
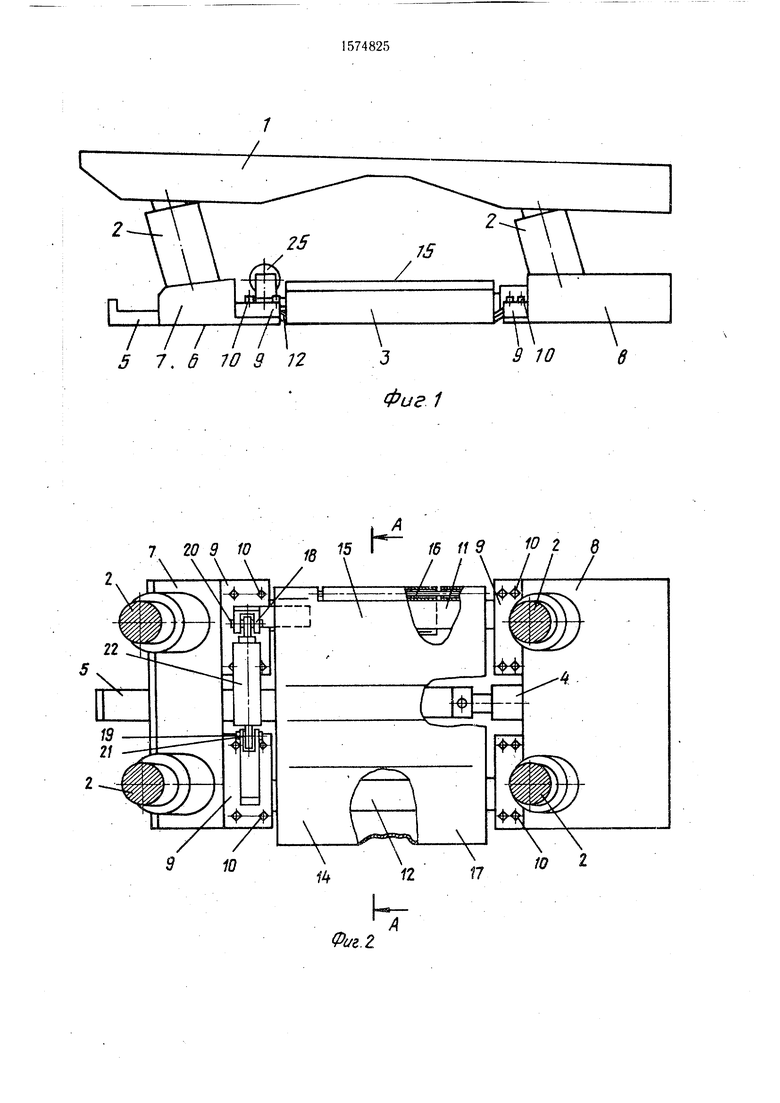
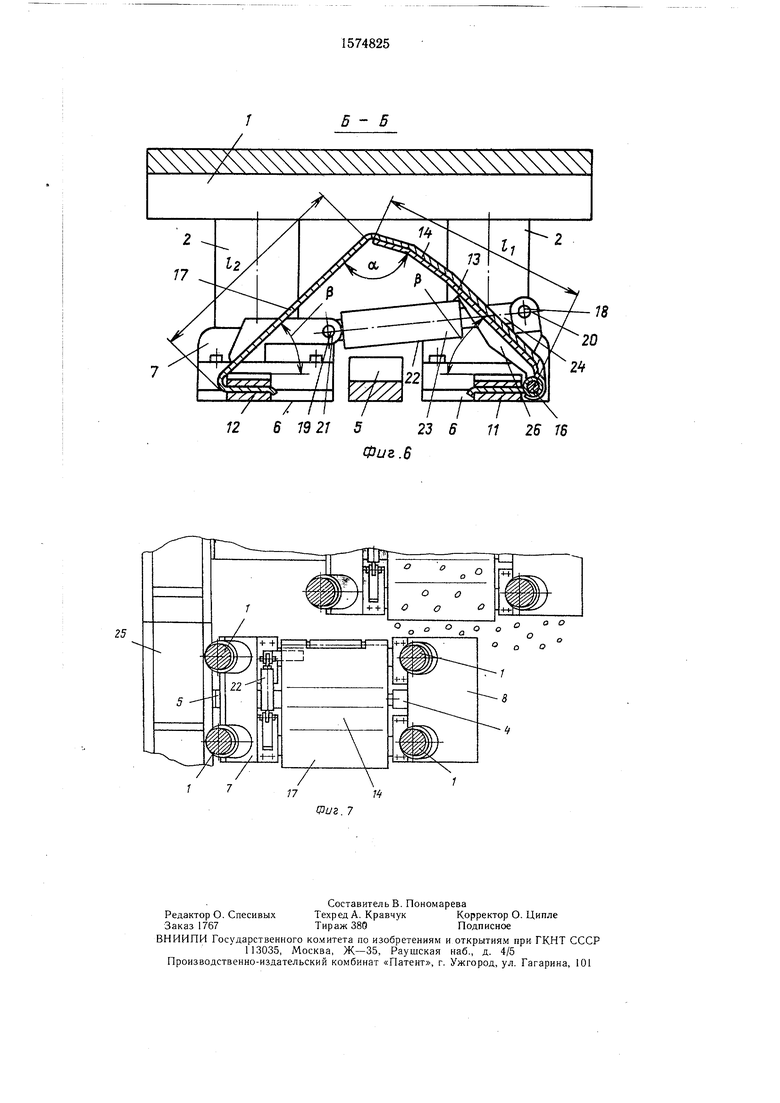
На фиг. 1 изображена секция механизированной крепи, вид сбоку; на фиг. 2 - -о же, вид в плане (перекрытие условно не показано); на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - секция крепи до передвижения к конвейеру (к забою), вид в плане (перекрытие условно не показано); на фиг. 5 - секция крепи во время передвижения к конвейеру, вид сбоку (конвейер vf штыб условно не показаны); на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - секция крепи, передвинутая к конвейеру перед распором, вид в плане (перекрытие условно не показано).
Секция механизированной крепи состоит из перекрытия 1, гидростоек 2, основания 3 с гидродомкратом 4 передвижения, соединенного с тягой 5, причем основание 3 представляет собой два коробчатой формы с днищами 6 корпуса 7 и 8 основания (для закрепления в них гидростоек 2), которые посредством плит 9 и болтов 10 соединены между собой продольными боковыми балками 11 и 12 (например, в виде плоских рессор) и закрыты верхним листом 13 и гибким элементом 14, служащими верхней поверхностью 15 основания 3 (фиг. 1 и 2). Верхний лист 13 расположен состоронь внутренней поверхности гибкого элементе 14 и соединен шарниром 16 с продольной боковой балкой 11, а гибкий элемент 14 закреплен жестко своими концами с продольными боковыми балками 11 и 12 и в поперечной плоскости основания 3 имеет длину, равную не менее суммарной длины 1, верхнего листа 13 и длины 12 не контактирующего с ней участка 17 гибкого элемента 14 (фиг. 2, 3 и 6). С верхним листом 13 и коробчатым корпусом 7 основания соответственно шарнирами 18 и 19 с помощью осей 20 и 21 соеди0
5
нен гидроподъемник 22, состоящий из гидро- цилиндра 23 и штока 24. Причем шарниры 18 и 19, продольная ось гидроподъемника 22 и оси 20 и 21 расположены в плоскости,
0 параллельной днищам 6 корпусов 7 к 8, а также над верхней поверхностью 15 основания 3 (фиг. 2, 3).
Секция механизированной крепи работает следующим образом.
В исходном положении секция механизи5 рованной крепи отодвинута от конвейера 25 ч расперта гидростойками 2, пр:;чем перед передвижением крепи и включением соответствующих гидроблоков снимается распор рабочей жидкость под давлением с гидростоек 2, и перекрытие 1 не поддерживает кровлю. Как при распертой секции крепи в боковые породы, так и особенно при снятом распоре крепи на верхней поверхности 15 основания 3 накапливается штыб, попавший с кровли через межсекционные зазоры (фиг. 4).
Для передвижения секции крепи разгружаются на необходимую величину гидростойки 2, и затем подачей в гидродомкрат 4 рабочей жидкое : и под давлением в соответствующую полость гидродомкрат 4 через тя0 гу 5, соединенную с конвейером 25, осуществляют передвижение крепи к забою. Одновременно с гидродомкратом передвиж- ния 4 посредством гидравлической коммутационной связи рабочая жидкость под давлением поступает в гидроцилиндр 23 гидро5 подъемника 22 и выдвигает из него шток 24. Гидроподъемник 22, опираясь через ось 21 и шарнир 19 на коробчатое основание 7 и воздействуя через ось 20 и шарнир 18 на верхний лист 13, осуществляет ее разворот з шарнире 16 относительно продольной боковой стороны в вертикальной плоскости пласта, т. е. по отношению днищ 6 корпусов 7 и 8 основания. Причем с поворотом верхнего листа 13 производится подъем под углом к про- 4очьнон боковой стороне 12 участка 17 гибкого элемента 14. Раздзижкг гидроподъемника 22 прекращается с выборкой длины (1и) участка 17 гибкого sru цента 14 с учетом его упругой деформ ции. По окончании
0
подъема верхнего листа 13 с закрепленным на ней гибким элементом 14 и его участком 17 они устанавливаются своими плоскостями под углом (к) между собой и под углом (Р) к почве. Величина последнего угла, обеспечиваемая длинами участка 17 и листа 13, превышает коэффициент трения покоя горной массы по поверхности гибкого элемента 14, благодаря чему горная масса (штыб) под воздействием гравитационных сил поворотного движения листа 13 и участка 17 элемента 14, а также колебательного («пружинистого) движения грани и участка 17 (из-за упругости гибкого элемента 14) удаляется с верхней поверхности 15 основания 3 на почву, пласта и далее по мере передвижения крепи остается в завале (фиг. 2, 4, 5 и 6).
После окончания передвижения секции крепи к конвейеру 25, оставления штыба в завале и между коробчатыми корпусами 7 и 8 основания по почве пласта (фиг. 7) переключением соответствующей гидравлической коммутационной связи рабочая жидкость подается на раздвижку гидростоек 1 (т. е. на распор крепи). Одновременно при окончании передвижения крепи рабочая жидкость поступает в гидроподъемник 22, уменьшая выдвижку штока 24. В результате сокращения гидроподъемника 22 его шток 24, шарниром 18 соединенный с верхним листом 13, поворачивает по направлению к продольным боковым сторонам 1 1 и 12 гибкий элемент 14 и лист I3,J образуя вновь верхнюю поверхность 15 основания 3 и устанавливая гидроподъемник 22 параллельно днищам б корпусов 7 и 8 оснований. При этом требуемый поворот верхнего листа 13 и гибкого элемента 14 по направлению к почве обеспечивается ограничителями 26, закрепленными под нижней поверхностью листа 13 и входящими в контакт с плоскостью продольной боковой стороны 11 основания 3 (фиг. 1, 2 и 3).
Таким образом, предлагаемая секция механизированной крепи при ее использовании позволит достигнуть компактной конструкции основания крепи по высоте; обеспечить надежную очистку от попавшей горной массы поверхности основания в людском про- ходе крепи на тонком пласте; улучшить ус5
ловия передвижения обслуживающего пер сонала в ограниченном рабочем пространстве крепи.
При обеспечении секций крепи соответствующей гидравлической коммутационной связью процессов передвижения крепи, очистки от штыба основания и распора крепи в боковые породы можно достигнуть автоматизации одного из трудоемких процессов при обслуживании крепи. 0 В совокупности все это повысит эффективность применения очистных механизированных комплексов на тонких пластах с неустойчивой кровлей за счет уменыпсни трудоемких ручных работ в лаве и повышения безопасности и комфортности труда под крепью обслуживающего персонала, а также позволит осуществить в автоматизированном режиме работу крепи по очистке ее рабочего пространства от попавшей горной массы.
0
Формула изобретения
Секция механизированной крепи, содержащая перекрытие, связанное гидростойками с основанием, гндродомкра-т передвижения, связанный с основанием, включающим передние и задние корпуса коробчатой формы с днищами основания, соединенные между собой продольными боковыми балками, на одной из которых шарнирно за0 креплен одной стороной верхний лист, гидродомкрат подъема, соединенный шарнирно с верхним листом основания и с корпусом основания, отличающаяся тем, что, с целью обеспечения уменьшения габаритов при повышении надежности работы за счет удале5 ния породной и угольной мелочи из рабочего пространства крепи, предназначенного для перемещения людей, верхний лист основания расположен под гибким элементом, концы которого закреплены на продольных боковых балках основания, а длина больше
0 длины верхнего листа, при этом шарниры крепления гидроподъемника с коробчатым основанием и верхней гранью расположены в плоскости, параллельной днищам оснований, а рабочая полость гидродомкрата передвижения сообщена с поршневой полостью гид5
родомкрата подъема
75
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Секция механизированной крепи | 1985 |
|
SU1308766A1 |
| Секция механизированной крепи | 1987 |
|
SU1469170A1 |
| Секция шахтной механизированной крепи | 1987 |
|
SU1573196A1 |
| Механизированная крепь | 1988 |
|
SU1606703A1 |
| Механизированная крепь | 1984 |
|
SU1227815A1 |
| Перекрытие секции механизированной крепи | 1989 |
|
SU1714156A1 |
| Основание секции механизированной крепи | 1988 |
|
SU1521880A1 |
| Основание секции механизированной крепи | 1990 |
|
SU1756578A1 |
| Концевая секция механизированной крепи | 1983 |
|
SU1086180A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |

Изобретение относится к горному оборудованию, а именно к крепям механизированных комплексов для выемки угля на тонких пластах. Цель - обеспечение уменьшения габаритов при повышении надежности работы за счет удаления породной и угольной мелочи из рабочего пространства крепи, предназначенного для перемещения людей. Секция крепи содержит перекрытие 1, гидростойками 2 связанное с основанием, имеющим гидродомкрат (ГД) передвижения. Основание представляет собой два коробчатой формы корпуса 7 с днищами 6, закрытых верхним листом (ВЛ) 13 и гибким элементом (ГЭ) 14. При этом ВЛ 13 расположен под ГЭ 14, концы которого закреплены на продольных боковых балках 11, 12. Длина ГЭ 14 больше длины ВЛ 13. С верхним листом 13 и коробчатым корпусом 7 основания соответственно шарнирами 18,19 с помощью осей 20 и 21 соединен гидроподъемник 22, состоящий из ГД 23 и штока 24. Шарниры 18, 19 крепления гидроподъемника 22 с коробчатым основанием и верхней гранью расположены в плоскости, параллельной днищам 6 основания. Рабочая полость ГД передвижения сообщена с поршневой полостью ГД 23 подъема. Одновременно с ГД передвижения рабочая жидкость поступает в ГД 23 и выдвигает шток 24. При этом гидроподъемник 22, опираясь через ось 21 и шарнир 19 в коробчатый корпус 7 и воздействуя через ось 20 и шарнир 18 на ВЛ 13, осуществляет его разворот в шарнире 16. С поворотом ВЛ 13 производится подъем под углом к продольной боковой стороне участка 17 ГЭ 14. 7 ил.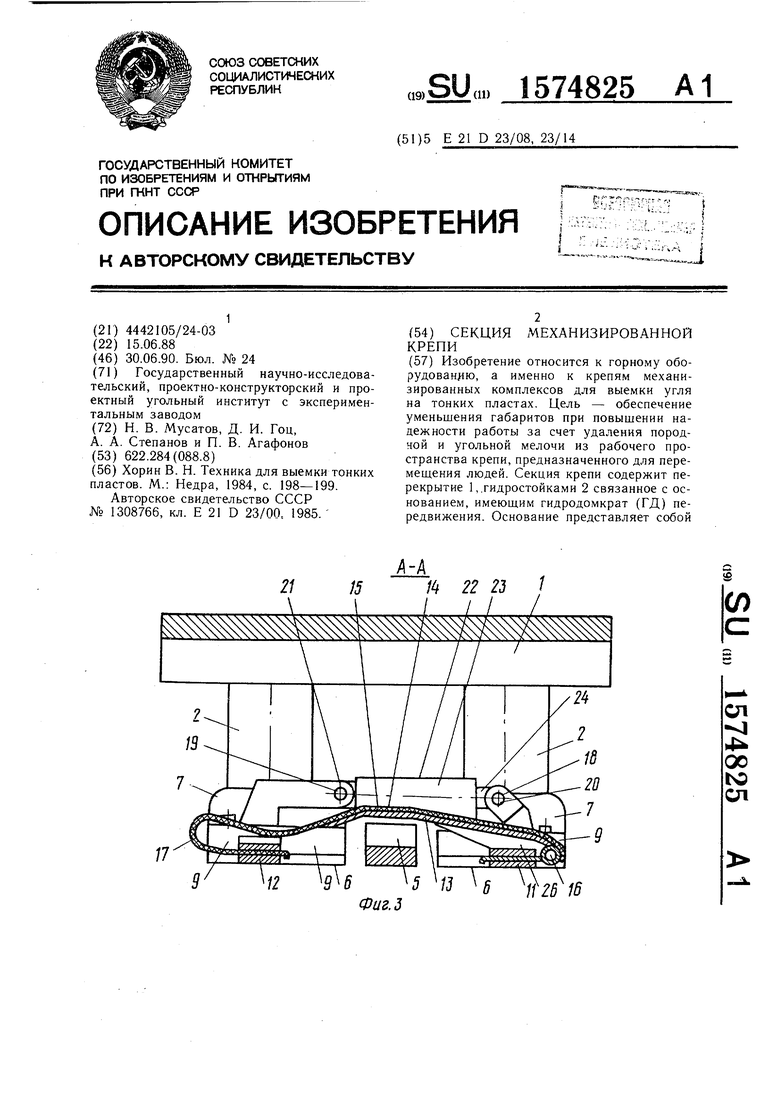
I I I I I
5 7. д 10 9 12
го 9 ю
18
К
15 Г
Риг.2
3
Фиг 1
16 H 9
hr
фигЛ
6-5
IT
12 6 1921 523 6
Фиг. 6
11 26 Г6
| Хорин В | |||
| Н | |||
| Техника для выемки тонких пластов | |||
| М.- Недра, 1984, с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Секция механизированной крепи | 1985 |
|
SU1308766A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
