1 1
Изобретение относится к общему auLHHocTpoeHHK) и может быть использоано wiH получения прерывистого двиения исполнительного органа, установленного на ведомом валу механизма, при непрерывном движении ведуТцего звена.
Цель изобретения - повышение на- ежности мальтийского мexaниз a путем повышения износостойкости подвижного соединения палец - паз и устранения избыточных связей в механизме.
На фиг. 1 изображен мальтийский механизм, обшдй вид; на фиг. 2 - сечение А-А на фиг,1; на фиг. 3 - условная схема взаимодействия пальца и паза креста при перекосе пальца в пазу. Мальтийский механизм содержит ва- дущий вал 1, на котором жестко закреплен поводок 2 с пальцем; 3 и фиксирующей шайбой 4, и мальтийский крест 5,установленный жестко на ведомом валу 6.
В мальтийском кресте выполнены радиальные пазы 7, взаимодействующие с пальцем 3, и фиксируюш е выемки 8, взаимодействующие с фиксирующей шайбой 4.
Боковые поверхности пальца 3 имеют выпуклую форму, а пазов 7 - вогнутую и очерчены дугами окружностей с близкими радиусами кривизны. Ра,циусы этих окружностей р, и р (фиг. 3), причем Рг PI Целесообразно применять р (,1)р, . Диапазон соот ношений между радиусами кривизны боковых поверхностей пальца 3 р, и стенок паза 7 pj выбран с таким условием, чтобы в результате приработки подвижного соединения палец - паз обеспечивалось касание, близкое к линейному (по ширине паза). Нижняя и верхняя границы соотношений между р., и р, выб раны с.учетом получения максимального эффекта снижения контактных напряжений при контактировании выпуклого пальца 3 и вогнутого паза 7 -с близкими радиусами кривизны боковых поверхностей. При р 1,02 р, и PJ 7 1, 1 р2 уровень снижения контактных напряжений значительно меньше. При контактировании выпуклого пальца 3 и вогнуто- го паза 7, радиусы кривизны боковых поверхностей которых определяются соответственно р, и р7 (1,02- -1,1) р, , где PJ р, , профиль контак- тируюощх поверхностей в наиболее нагруженной зоне приобретает большую
278742
кривизну ПС) сравнению с начальной, прилегание рабочих поверхностей становится более близким и напряжения вдоль большой оси площадки контакта
5 распределяются более равномерно.Следовательно, увеличивается площадка контакта, имеющая форму пятна контакта, и уменьшаются напряжения на контакте, что приводит к уменьшению из0 носа пальца 3 и паза 7 креста 5.
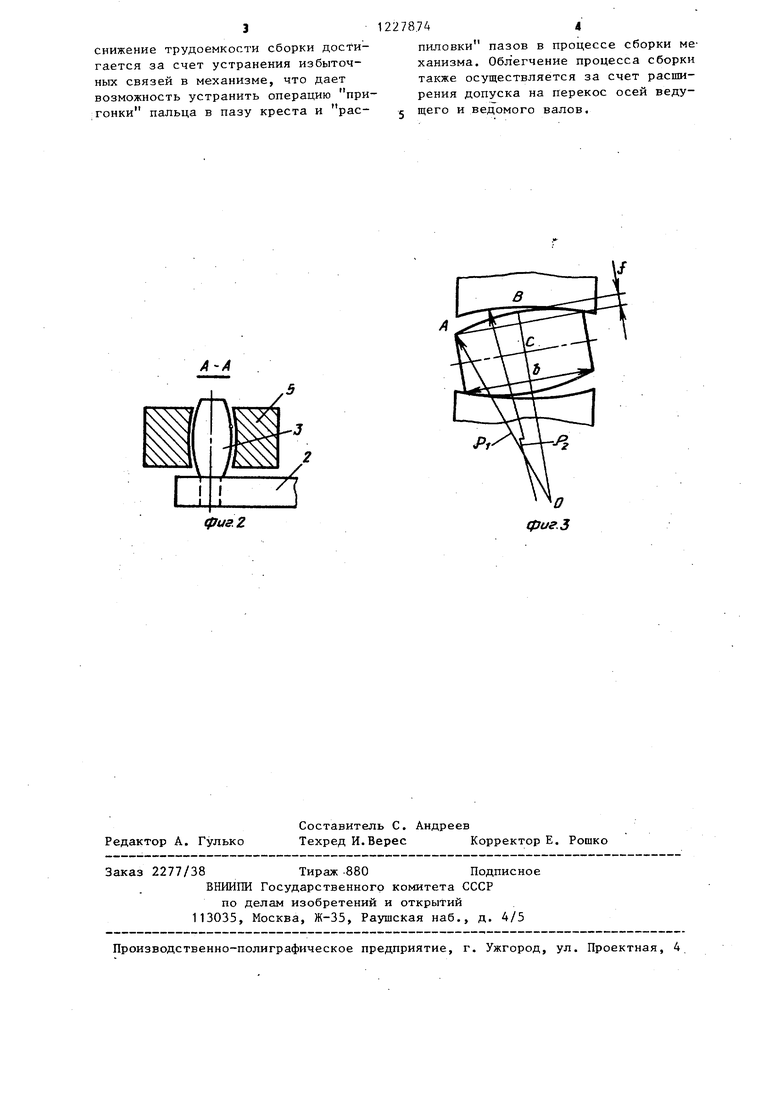
Величина стрелы выпуклости f пальца 3 (фиг. 3) определяется расчетом в зависимости от конструктивных и прочностных параметров мальтийского
5 механизма. На практике можно принять, что стрела выпуклости пальца 3 равна первоначальному зазору в подвижном соединении палец-паз. Для определения радиуса окружности, описывающего
20 боковую поверхность пальца 3, рассматривается положение пальца 3 в пазу 7 креста 5 с учетом перекоса (фиг. 3). Из подобия треугольников ABC и АОВ получается
f
F72
b/2
где р,
.р. bV4f.
30
35
40
45
50
55
Мальтийский механизм работает следующим образом.
При вращении ведущего вала Т и поводка 2 палец 3 входит в паз 7 мальтийского креста 5 и происходит его поворот на некоторьй угол, определяемый числом пазов 7 и размерами механизма. При выходе пальца 3 из паза 7 мальтийского креста 5 происходит йыс- той последнего. В период выстоя мальтийский крест 5 фиксируется от про- ворота фиксирующей шайбой 4, взаимодействующей с фиксирующими выемками 8 мальтийского креста 5.
В дальнейшем цикл работы механизма повторяется.
Применение пальца с вьшуклой боковой поверхностью и радиальных пазов креста с вогнутой поверхностью, радиусы кривизны которых весьма близки и равны р , р, ( t ,02- -1,1) р, , позволяет повысить нагрузочную способность мальтийского механизма, увеличить надежность и долговечность. Последнее достигается за.счет повышения износостойкости п-одвижного соединения палец-паз в 1,2-1,5 раза, меньшей чувствительности механизма к перекосу осей ведущего и ведомого валов. Кроме того.
снижение трудоемкости сборки достигается за счет устранения избыточных связей в механизме, что дает возможность устранить операцию пригонки пальца в пазу креста и рас12278.7А4
пиловки пазов в процессе сборки механизма. Облегчение процесса сборки также осуществляется за счет расширения допуска на перекос осей веду- 5 щего и ведомого валов.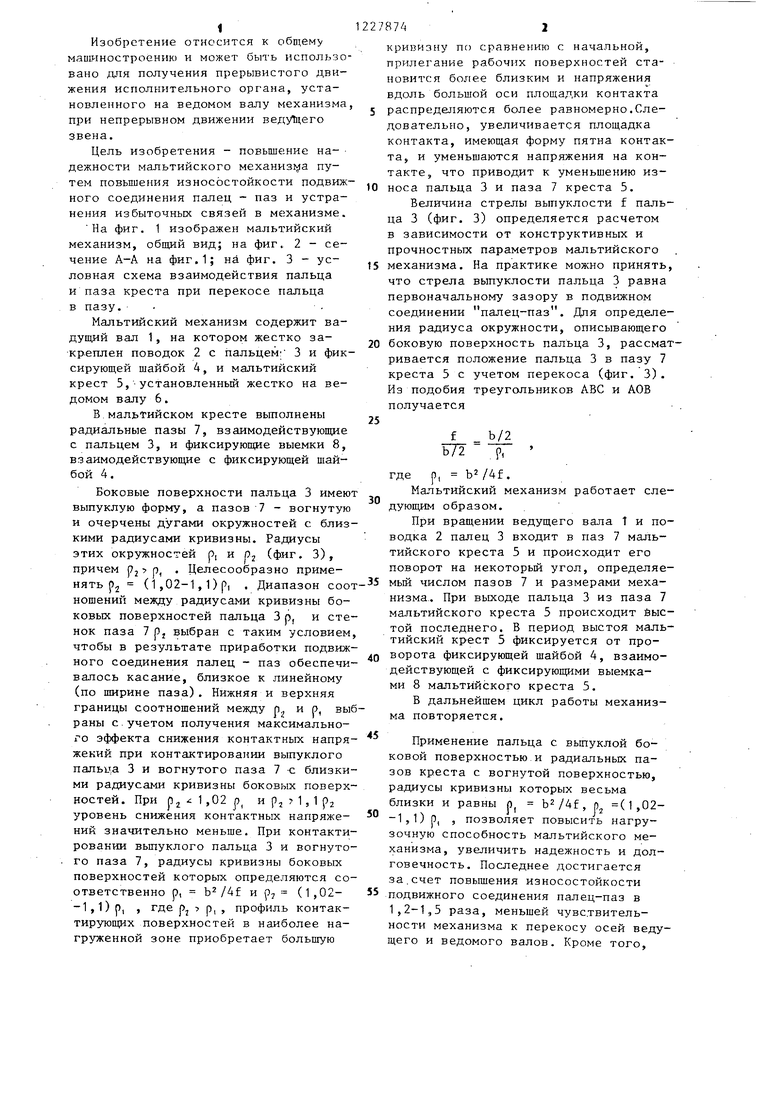
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм | 1983 |
|
SU1165841A1 |
| Мальтийский механизм | 1986 |
|
SU1335762A1 |
| Установка для мойки деталей | 1989 |
|
SU1754229A1 |
| Мальтийский механизм | 1986 |
|
SU1404714A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Мальтийский механизм кинопроектора | 1975 |
|
SU609936A1 |
| Мальтийский механизм | 1986 |
|
SU1388638A1 |
| Устройство для подачи прокладчиков уточной нити ткацкого станка с волнообразно подвижным зевом | 1977 |
|
SU749955A1 |
| Устройство для устранения затиранияРЕжущЕгО иНСТРуМЕНТА HA зубОдОлбЕжНОМСТАНКЕ | 1979 |
|
SU797849A1 |
| Манипулятор | 1985 |
|
SU1295105A1 |

А-А
фиг. г
Редактор А, Гулько
Составитель С. Андреев
Техред И.Верес Корректор Е, Рошко
Заказ 2277/38Тираж .880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство | |||
| Дезаксиальный мальтийский механизм | 1981 |
|
SU1073518A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧЕРТЕЖЕЙ ДЛЯ ОДНООБРАЗНОЙ РАСКРОЙКИ ПРЕДМЕТОВ ОДЕЖДЫ | 1919 |
|
SU287A1 |
| Молотилка для обмолота хлебов на корню | 1923 |
|
SU2470A1 |
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Справочное пособие, М: Машиностроение, 1976, с | |||
| Прибор для вычерчивания конических сечений | 1922 |
|
SU457A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 0 |
|
SU232698A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
