Изобретение относится к балансировочной технике, а именно к балансировке роторов формообразованием базовых поверхностей при. их вращении.
Целью изобретения является повы-- , шение точности и упрощение процесса балансировки.
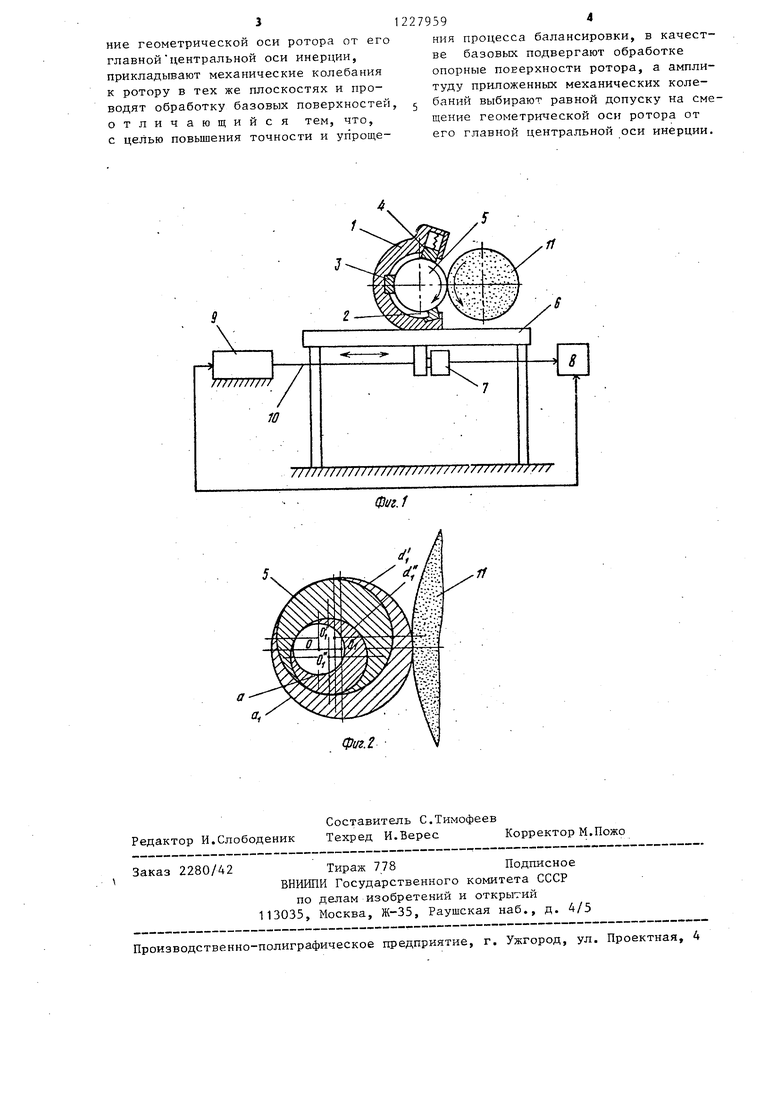
На фиг. 1 изображена схема устройства, реализующего способ-, на фиго2 схема оси ротора при формообразовании.
Устройство, реализующее предлагаемый способ, содержит скобу 1, на которой в каждой плоскости коррекции установлены два неподвижных упора 2 и 3 и один подвижный упор 4. На упорах 2-4 на формообразующих цапфах 5 ротора происходит его вращение. Скоба 1 установлена на платформе 6, на которой закреплены вибродатчики 7 в каждой плоскости коррекции
Вибродатчики 7 связаны с устройством 8, служащим для определения угла и величины смещения геометрической оси вращения ротора (ГО) от главной центральной оси инерции (ГЦОИ) ротора и управления вибровозбудителем 9, воспроизводящим эти кол€ бания по определенным параметрам, Электроди-- намический вибровозбудитель 9 через стержень 10 связан с платформой 6., Инструмент 11 служит для формообразования цапф 5 ротора, на которых осуществляют его вращение.
Способ реализуется следующим образом
Балансируемый ротор цапфа;-4И 5 (поверхность а, на фиг, 2) устанавливают на упоры 2 и 3 скобы 1, при-- жимают подпружиненным упором 4 и приводят во вращение (привод ротора не показан),
Затем производят измерение параметров отклонения ГО вращения ротора от его ГЦОИ в двух параллельных плоскостях с помощью вибродатчи ков 7 и устройства 8
Измеренные параметры запоминают посредством устройства 8, Устройство 8 и электродинамический вибровоз- будитель 9 через стержень 10 и платформу 6 ротору сообщают колебатель- ные движения с фазой, соответствующей фазе смещения ГО от ГЦОИ, и амплитудой, величину которой выбирают равной величине допустимого значения смещения ГО от ГЦОИ,
27959г
Если величина начального дисбаланса во много раз превьинает его допустимую величину (D), то для сокращения тдиклов балансировки амплитуду
, Aj сообщаемых колебаний выбирают в несколько раз (п раз) больше допустимого значения дисбаланса (но меньше величинь начального дисбаланса) . После сообщения ротору колебатель10 ного движения по определенным параметрам производят обработку той по- верхности, на которой ротор вращают, т„е. поверхности а цапфы 6. После обработки происходит сближен е оси
15 цапфы, т„е, ГО ротора к ГЦОИ (на
фиг о 2 ГО ротора с точки О переходит в точку 0(5 приближаясь к точке О, т„е. к ГЦОИ),. Затем, врап1;ая ротор на поверхности а цапф 5j снова про2Г( изводят измерение параметров откло- ) ГО от ГЦОИ в двух параллельных плоскостях5 величины которых запоминают Если величина остаточного дисбгшанса превышает величину n.D ,
25 то ротору снова сообщают колебания с амплитудой, равной nD . Затем производят обработку поверхности а цапф 5, т,. Вс поверхности 5 на которой вращают ротор В результате проис30 ходит сближение ГО ротора (с точки O s к точке Оi 5 см, фиг. 2) к его .
Г ЦОИ (точка О на фиг 2), Затем,
- с
на поверхности а- цапш 5, снова производят измерение параметров
отклонения ГО от ГЦОИ, величину ко- - тторьс-с запоминают,. Если всаличина остаточного дисбаланса меньше п -Д, то ротору сообщают колебания с амплит - дойэ равной Л , Циклы повторяют до достижения величины отклонения ГО от ГЦОИ,, ра.вной или меньшей допустимой величины,:
I Так в;ак для устранения дисбаланса
подвергают обработке поверхности, па которых вращают ротор 5 то осуществляется постепенное приближение ГО к ГЦОИо Выбор амплитуды колебаний, равной допуску на дисбаланс, позволяет упростить технрлогрпо баланси41)
ровки вследствие управления балансировкой только по фазе
Формула изобретения
35 Способ ба лансировки роторов, заключающийся в том, что в двух парал- лельньж ялоскостях, перпендикулярных оси вращения ротора, измеряют смещение геометрической оси ротора от его главной центральной оси инерции, прикладывают механические колебания к ротору в тех же плоскостях и проводят обработку базовых поверхностей, отличающийся тем, что, с целью повышения точности и упрощения процесса балансировки, в качестве базовых подвергают обработке опорные поверхности ротора, а амплитуду приложенных механических колебаний выбирают равной допуску на смещение геометрической оси ротора от его главной центральной оси инерции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки роторов | 1984 |
|
SU1221518A1 |
| Станок для балансировки роторов центрированием | 1985 |
|
SU1259123A1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| Способ балансировки роторов при вращении (его варианты) | 1984 |
|
SU1226087A1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
Изобретение относится к балансировочной технике. Целью изобретения является повьшение точности и упрощение процесса балансировки за счет обработки при балансировке базовых поверхностей, на которых происходит вращение ротора и создание колебани й ротора при обработке амплитудой, равной допуску на эксцентриситет центра масс. 2 ил. 1C го со ел UD
///////////
в
Ч
Фиг.г
Редактор И.Слободеник
Составитель С.Тимофеев
Техред И.ВересКорректорМ.Пожо
2280/42
Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СПОСОБ БАЛАНСИРОВКИ | 0 |
|
SU211852A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ балансировки роторов | 1982 |
|
SU1060958A1 |
