Изобретение относится к баланси- . ропочной технике, а именно к балансировке роторов при их вращении.
Цель изобретения - повышение точности балансировки.
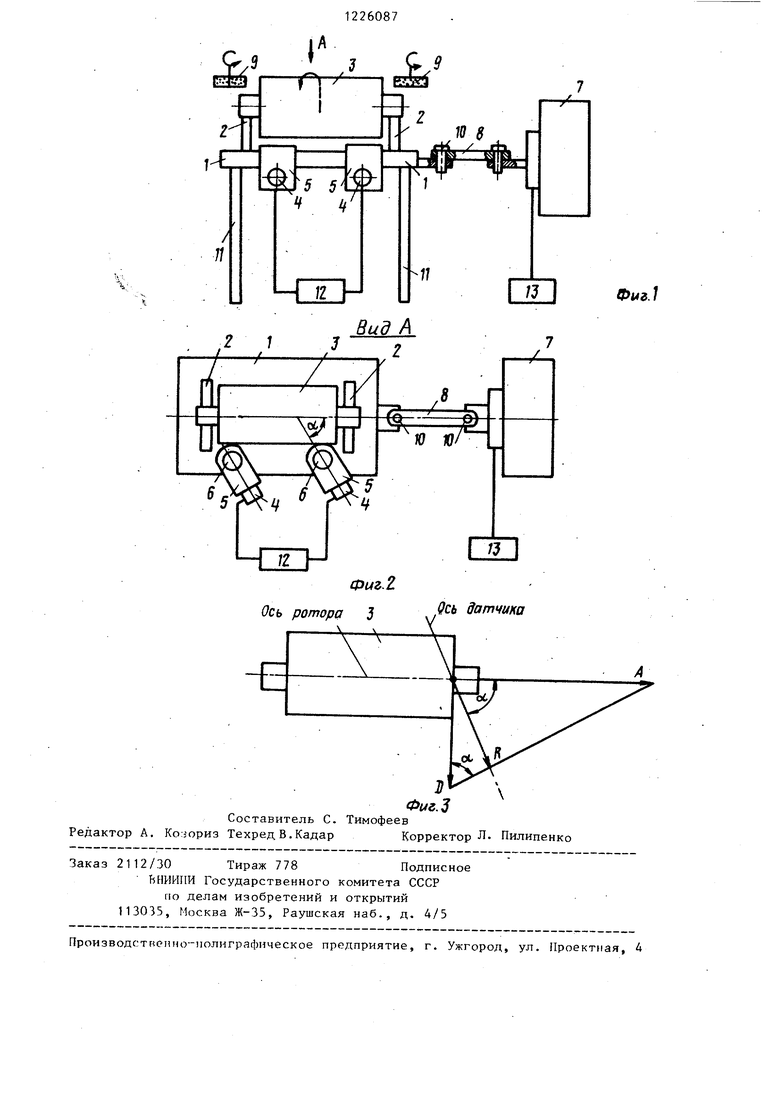
На фиг. 1 представлено устройство для реализации предлагаемого способа; на фиг. 2 - вид А на фиг. 1;на фиг.3 - схема колебаний ротора.
Устройство содержит платформу 1 с призмами 2, на которых происходит вращение ротора 3, датчики 4, закрепленные на поворотных кронштейнах 5. Кронштейны 5 с помощью винтов 6 крепятся на платформе 1. Устройство содержит также электродинамический вибровозбудитель 7, сообщающий ротору 3 через планку 8 и платформу 1 принудительно осевые колебания для взаимодействия со шлифовальными кругами 9. Планка 8 соединена с платформой 1 и вибровозбудителем 7 с помощью винтов 10. Платформа 1 установлена на четырех стержнях 11, обеспечивающих три
степени свободы платформы 1. Для изме-. ходило их взаимодействие, за каждый
рения дисбаланса устройство содержит блок 12 измерения, а для управления работой вибровозбудителем 7. - блок 13 управления.
Способ реализуется следующим образом.
Оси датчиков 4 с помощью кронщ- тейнов 5 устанавливаются относительно оси ротора под углом ot, отличным от 90 и 0°. Ротор 3 от привода (не показан) приводят во вращение, блоком 12 измеряют его дисбаланс и запоминают. Затем определяют амплитуду А осевых колебаний ротора.
На .фиг. 3 показана схема колебаний ротора, где
А - амплитуда приложенных осевых
колебаний от вибровозбудителя; D - амплитуда колебаний от дисбаланса;
R - проекция на ось измерения (ось датчика) амплитуды колебаний ротора от осевых колебаний и дисбаланса; oi - угол между осью измерения и
осью ротора. Как видно из схемы,
О sin oi R А соял/. (1)
30
35
40
45
50
sin oi R A cosd.
полуоборот его (ротора) вращение. Через определенное время устанавлив емое в зависимости от величины дисб ланса D ротора 3, шлифовальный круг отводят с помощью винта 10, планки 8 отсоединяют платформу 1 от вибровоз будителя 4 и измеряют дисбаланс ротора. Если величина остаточного дисбаланса больще допустимой, то снова Vio выражению (2) определяют амплиту ду А осевых колебаний ротора и ему с помощью вибровозбудителя 7 сообщаю осевые колебания. Фазовращателем бло ка 13 управления вибровозбудителем совмещают фазу.осевых колебаний с фа зой дисбаланса и подводом шлифовального круга удаляют неуравновешенную массу с ротора.
Возможен также другой вариант спо соба.
Оси датчиков 4 с помощью кронштейнов 5 устанавливают относительно оси ротора под углом oi. , равным 90° Ротор 3 от привода (не показан) прив дят во вращение, блоком 12 измеряют его дисбаланс и запоминают. Затем определяют угол о из выражения oi
д arctg г-выведенного из выражения
откуда
A D-tgoi ,
(2)
При этом как следует из вырах ения (2), амплитуды колебаний ротора 3 в
S
0
направлении оси датчика 4 как от дисбаланса ротора, так и от колебаний вибровозбудителем 7, равны. Это позволяет использовать как датчик дисбаланса, так и тракт блока 12 измерения дисбаланса для контроля осевых колебаний ротора. При этом измеренная величина от дисбаланса и от осевых колебаний ротора одинакова. Это позволяет исключить фазовые ошибки измерения дисбаланса, связанные с нелинейными искажениями как датчика 4, так и системы измерения в делом. После запоминания параметров дисбаланса с помощью планки 8 и винтов 10 вибровозбудитель 7 соединяют с платформой 1 и ей сообщают колебания с амплитудой А, после чего с помощью фазовращателя блока 13 управления вибровозбудителем 7 совмещают по фазе:колебания ротора от вибровозбудителя с фазой дисбаланса. Затем подводят шлифовальный круг 9 к ротору 3 таким образом, чтобы проис. ходило их взаимодействие, за каждый
0
5
0
5
0
s
полуоборот его (ротора) вращение. Через определенное время устанавливаемое в зависимости от величины дисбаланса D ротора 3, шлифовальный круг отводят с помощью винта 10, планки 8 отсоединяют платформу 1 от вибровозбудителя 4 и измеряют дисбаланс ротора. Если величина остаточного дисбаланса больще допустимой, то снова Vio выражению (2) определяют амплитуду А осевых колебаний ротора и ему с помощью вибровозбудителя 7 сообщают осевые колебания. Фазовращателем блока 13 управления вибровозбудителем совмещают фазу.осевых колебаний с фазой дисбаланса и подводом шлифовального круга удаляют неуравновешенную массу с ротора.
Возможен также другой вариант способа.
Оси датчиков 4 с помощью кронштейнов 5 устанавливают относительно оси ротора под углом oi. , равным 90° . Ротор 3 от привода (не показан) приводят во вращение, блоком 12 измеряют его дисбаланс и запоминают. Затем определяют угол о из выражения oi
д arctg г-выведенного из выражения
(2), и- йроворотом кронштейна 5 устанавливают ось датчика под углом о (фиг. 1 и 2). Затем с помощью планки 8 и винтов 10 вибровозбудитель 7 соединяют с платформой 1 и ей (следоваI
тельно, и ротору 3) при помощи блока 13 управления сообщают осевые колебания с постоянной амплитудой А. При этом амплитуды R колебаний ротора в направлении оси датчика 4 от дисбаланса ротора D и от колебания вибровозбудителя 7 равны. Это позволяет использовать как датчик дисбаланса,так и один и тот же тракт блока 12 измерения дисбаланса и для контроля осевых колебаний ротора. При этом измеренная величина от дисбаланса и от осевых колебаний ротора одна и та же Это позволяет исключить фазовые ошибки измерения дисбаланса, связанные с нелинейными искажениями как датчика 4, так и системы измерения в целом. Потом с помощью фазовращателя блока 13 управления вибровозбудителем 7 совмещают по фазе колебания ротора от вибровозбудителя с фазой дисбаланса. Затем подводят щлифовальный круг 9 к ротору 3 таким образом, чтобы происходило взаимодействие круга 9 о ротором 3 за время каждого полуоборота его (ротора) вращения. Через определенное время, устанавливаемое в зависимости от величины дисбаланса D ротора 3, птифовальный круг отводят, ic помощью винта 10 и планки 8 отсоединяют платформу 1 от вибровозбудителя 7 и измеряют дисбаланс ротора. Если величина остаточного дисбаланса больше допустимой, то снова определяАют угол oL по выражению в(- arctg
проворотом кронштейна 5 ось датчика устанавливают под расчетным углом, с помощью вибровозбудителя 7 ротору сообщают осевые колебания, фазовращателем блока 13 управления совмещают фазу колебания вибровозбудителя с фазой дисбаланса, подводят шлифовальный круг к ротору и удаляют неуравновешенную массу с ротора.
Предлагаемый способ повышает точ- ность воспроизводства фазы осевых ко
лебаний ротора за счет нечувствительности к фазовым ошибкам, что позволяет повысить точность балансировки.
Формула изобретения
1. Способ балансировки роторов при вращении, заключающийся в том, что измеряют дисбаланс датчиками вибраций и удаляют корректирующую массу воздействием режущего инструмента на ротор при их относительном осевом колебании, отличающийся тем, что, с целью повышения точности
балансировки, измеряют дисбаланс под углом к оси вращения ротора, а амплитуду колебаний выбирают из вьфажения
. tgot.,
где D - амплитуда колебаний ротора от дисбаланса;
о - угол между осью ротора и осью измерения.
2. Способ балансировки роторов при вращении, заключающийся в том, что измеряют дисбаланс датчиком вибраций и Удаляют корректирующую массу взаимодействием режущего инструмента на ротор при их осевом относительном колебании, отличающий- с я тем, что, с целью повьш1ения точности балансировки, измеряют дисбаланс в плоскости, перпендикулярной осевой плоскости ротора, сообщают ему осевые колебания заданной ампли- туды и разворачивают датчик вибраций в плоскости, параллельной оси вращения ротора, проходящей через ось чувствительности датчика, на угол, определяемой зависимостью .
dt
arcug ,
где А - амплитуда осевых колебаний,
ротора;
D - амплитуда колебаний ротора от дисбаланса.
Фиг./
г 1
4JLJ
Ось ротора 3
V
Фиг. J
Составитель С. Тимофеев Редактор А. Козориз Техред В.Кадар Корректор Л. Пилипенко
Заказ 2112/30 Тираж 778Подписное
ЬНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д. 4/5
Вид А
Фиг.2
Производстнонмо-полиграфическое предприятие, г. Ужгород, ул. Проектная, Д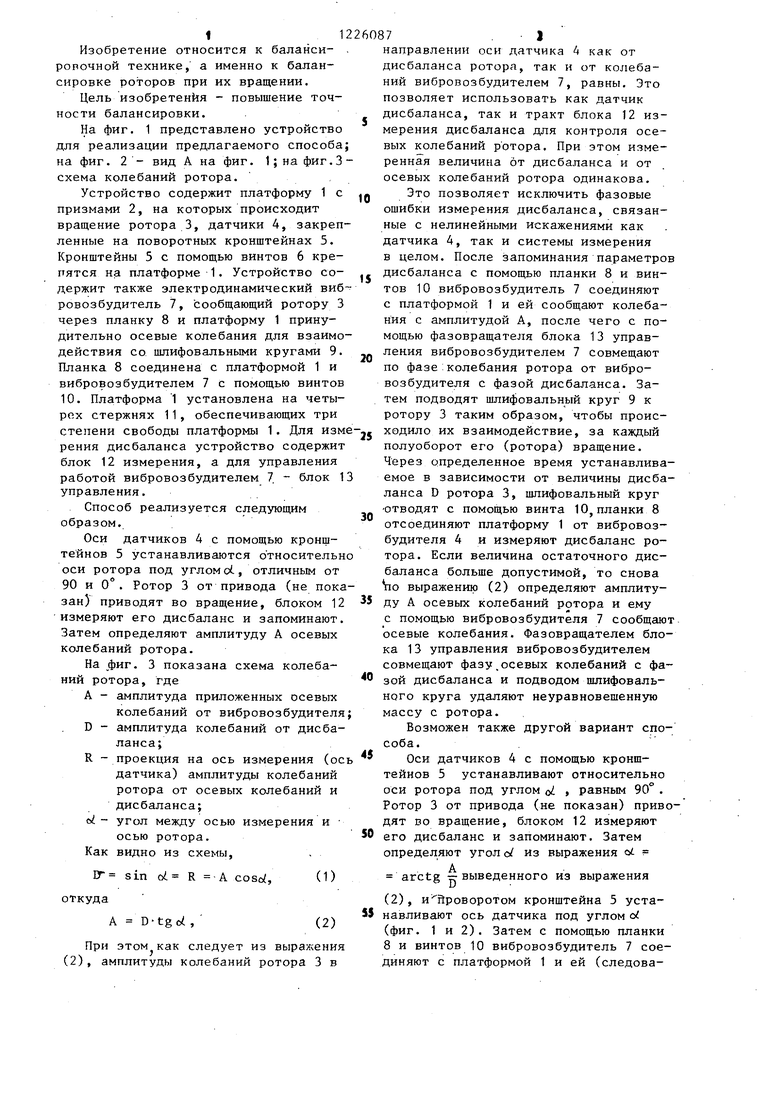
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| Способ балансировки роторов | 1984 |
|
SU1221518A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Станок для балансировки роторов центрированием | 1985 |
|
SU1259123A1 |
| Устройство для статической балансировки тел вращения | 1975 |
|
SU575526A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| Способ балансировки роторов | 1984 |
|
SU1227959A1 |
| Способ балансировки роторов при вращении | 1986 |
|
SU1366894A1 |
Изобретение относится к балансировочной технике. Цель изобретенияповышение точности балансировки за счет нечувствительности способа к фазовым ошибкам. Оси датчиков устанавливаются относительно оси ротора под углом oi , отличным от 90 и 0° . Ротор приводят во вращение, измеряют дисбаланс. Определяют амплитуду осевых колебаний ротора. При этом величина осевых колебаний ротора и величина дисбаланса одинаковы. Затем сообщают колебания ротору, совмещая их фазу с фазой от дисбаланса. Подводят к.ротору шлифовальный круг и обеспечивают их взаимодействие за каждый полуоборот ротора до устра - . нения дисбаланса 2 с.п. , « 3 ил. (Л to to Oi о 00 sj
| СПОСОБ АВТОМАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ ДЕТАЛЕЙ | 0 |
|
SU241773A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МНОГОКАНАЛЬНАЯ ЧАСТОТНАЯ СИСТЕМА ТЕЛЕИЗМЕРЕНИЯ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 0 |
|
SU166067A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Промывной клапан для туалетов и т.п. приборов | 1925 |
|
SU1953A1 |
