Иэобретешге относится к балансировочной технике, а именно к способу балансировки малогабаритных роторов .
Цельна изобретения является повыше ние точности балансировки,
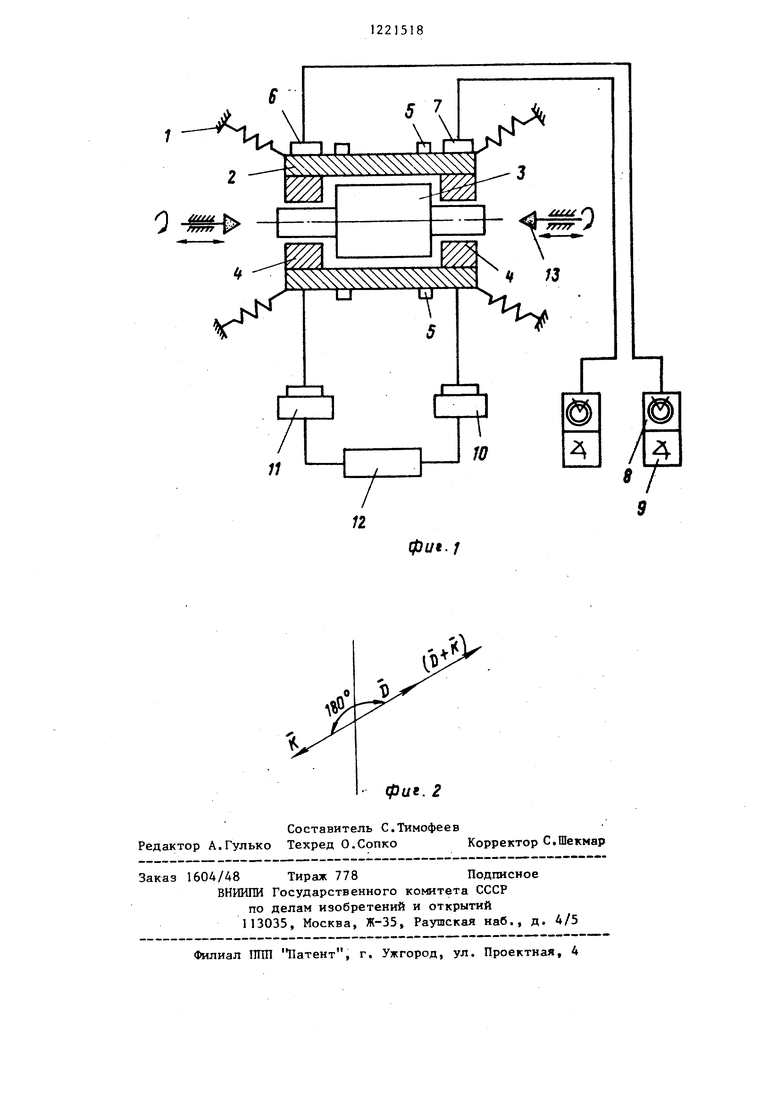
На фиг.1 изображено устройство, реализующее пpeдлaгae fcIй способ; на фиг о 2 - графическая схема реализации способа.
Устройство содержит основание 1, на котором упруго установлены измерительная платформа 2 с ротором 3. Платформа имеет трубчатую форму, на концах которой имеются втулки 4, на которьпс находится ротор. Втулки имеют возможность осевого перемещения для совмещения центра масс ротора с Центром паразитных масс. На платформе 2 с возможностью перемещения вдоль оси ротора установлены грузики 5 с переменной массой. На платформе закреплены вибродатчики 6 и 7, соединенные с измерителями 8 и 9 амплитуды и фазы соответственно. Платформа 2 связана с вибровозбудителями 10 и Пэ управляемыми блоком 12
Способ реализуется следукщим образом.
Измеряют массу и момент инерции ротора относительно оси, проходящей через центр масс ротора перпендикулярно оси его вращения. Затем приравнивают массу и момент инерции паразитных масс (платформа 2, втулки 4, датчики 6 и 7, подвижная часть вибровозбудителей 10 и П и грузики 5) к массе и моменту инерции ротора. Момент инерции паразитных масс, определяется относительно оси, проходящей через центр их масс перпендикулярно оси вращения ротора.
Приравнивание производится изменением масс грузиков 5 и их расположением по оси. После этого ротор уста- навливают во втулке 4 таким образом, чтобы центр масс ротора совпал с центром паразитных масс.
Приводят во вращение ротор 3 (привод вращения не показан), после чего с помощью вибровозбудителей 10 и 11 сообщают синусоидальные колебания ро
тору с частотой вращения в двух параллельных плоскостях, перпендикулярных оси вращения ротора. Изменением величин амплитуды и фазы приложенных колебаний посредством блока 12 управления приводят колебания от дисбаланса к нулю. При этом сила от дисбаланса D (фиг.2) и силы от приложенных механических колебаний К от виброприбора равны и направлены в противоположные стороны. Затем изменяют фазу приложенных колебаний на 180° (с помощью блока 12) и производят механическую обработку базовых поверхностей инструментом 13. Сила, действующая на платформу 2 и ротор 3, при этом равна D + К 2D.
Поскольку массы и моменты инерции ротора и паразитных масс равны и силы от дисбаланса увеличены вдвое, то исклк ается влияние паразитных масс на колебания ротора и его ГЦОИ становится неподвижной. Кроме того, при этом отпадает необходимость точного измерения фазы и амплитуды дисбаланса. Это позволяет исключить ошибки измерения, связанные с неточностью определения амплитуд и фаз от дисбаланса, и повысить точность центрирования, что приводит к повышению точности балансировки.
Формула изобретения
Способ балансировки роторов, заключающийся в том, что вращают ротор, центрируют его путем приложения периодических определенной амплитуды и фазы механических сил в двух плоскостях, перпендикулярных оси вращения ротора, и производят механическую обработку базовых поверхностей, отличающийся тем, что, с целью повьшения точности, перед приведением во вращение ротора выбирают массу и момент инерции паразитных масс равными массе и моменту инерции ротора, совмещают центры их масс, а после центрирования ротора. изменяют фазу механических сил на 180°.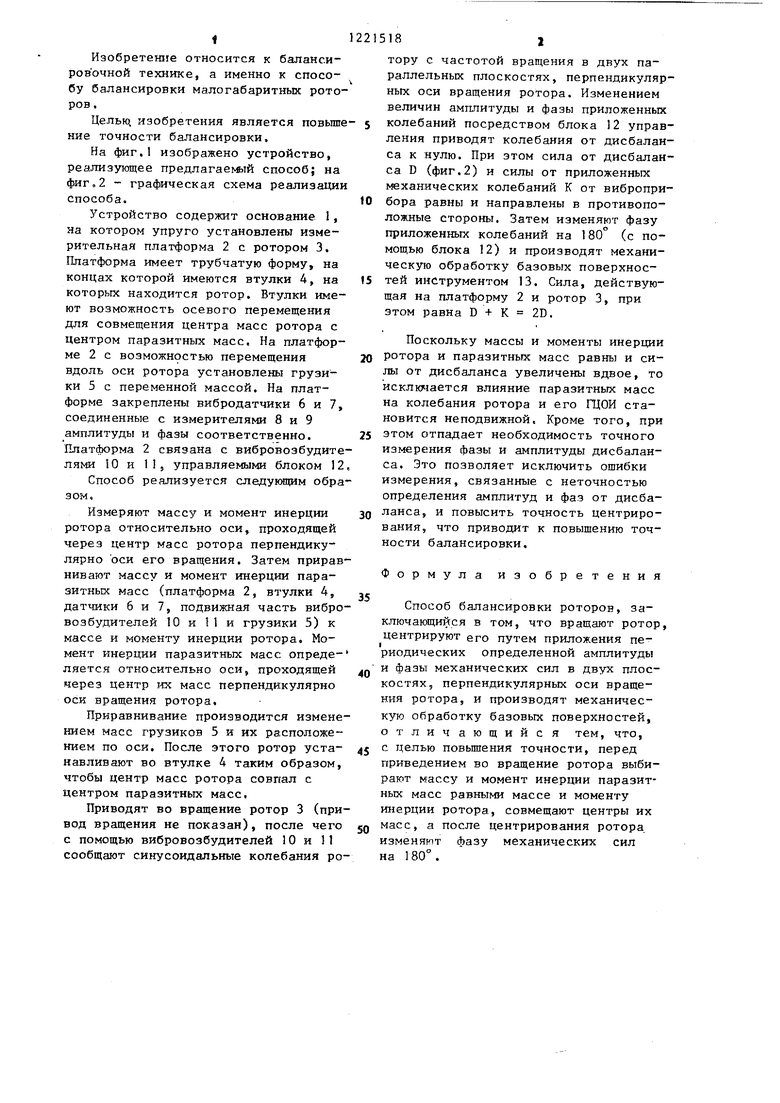
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки роторов | 1984 |
|
SU1227959A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| Способ балансировки роторов при вращении (его варианты) | 1984 |
|
SU1226087A1 |
| Станок для балансировки роторов центрированием | 1985 |
|
SU1259123A1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
Изобретение относится к машино- .строению и может использоваться при балансировке малогабаритных роторов. Цель изобретения - повышение точности балансировки за счет исключения влияния паразитных масс на колебания ротора, что делает главную центральную ось инерции неподвижной. За счет изменения масс грузиков и их положения приравнивают массу и момент инерции паразитных масс (платформа, втулки, датчики и т.д.) к известной массе и моменту инерции ротора. Устанавливают ротор так, чтобы его центр масс совпал с центром паразитных масс. Приводят ротор во вращение и сообщают ему синусоидальные колебания. Изменяя амплитуду и фазу колебаний, приводят колебания от дисбаланса к нулю. Изменяют фазу колебаний на 180° и механически об- рабатьтают базовые поверхности. 2 ил. § to ю ел 00
| СПОСОБ БАЛАНСИРОВКИ | 0 |
|
SU211852A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ балансировки роторов | 1982 |
|
SU1060958A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
