Изобретение относится к силовым следящим приводам общего.назначения и может быть использовано для квазиоптимального по быстродействию управления положением объекта.
Целью изобретения является повышение быстродействия привода за счет реализации квазиоптимального по быстродействию закона управления для управляющих сигналов типа единичного ступенчатого воздействия.
На чертеже представлена функционально-принципиальная схема силового следящего привода.
Силовой следящий привод содержит цифровой измеритель 1 рассогласования, цифровой датчик 2 положения, силовой привод 3, объект 4 управления, первый 5 и второй 6 цифроанало- говые преобразователи, релейный анализатор 7 ошибки, задатчик 8 входног сигнала, релейный анализатор 9 скорости, усилитель 10, второй 11 и первый 12 сумматоры, блок 13 памяти, релейный элемент 14, датчик 15 скорости, первое 16 и второе 17 реле, резистор 18.
Релейный анализатор 7 ошибки выполняет функции изменения коэффициента усиления усилителя 10 при включении первого 16 реле и фиксации момента запоминания сигнала ошибки устройства на выходе блока 13 памяти при включении второго 17 реле.
Силовой следящий привод работает следующим образом.
При отработке малых (до 1 град) рассогласований с высокой точностью силовой следящий привод имеет боль- щой коэффициент усиления. Задающий цифровой сигнал с выхода задатчика 8 поступает на цифровой измеритель 1 рассогласования, затем в виде цифрового сигнала1 рассогласования поступает на первый 5 цифроаналоговый преобразователь точного отсчета (максимальное выходное напряжение которого соответствует, например, t7 град рассогласования) и через нор м.сшьно замкнутые контакты релейного анализатора 7 ошибки, усилитель 10 и второй 11 сумматор - на силовой привод 3 управления объектом 4 управления, на валу которого установлен цифровой 2 датчик положения. При малых рассогласованиях и, соответственно, небольших скоростях их отработки сигналы с первого 5 цифроана
логового преобразователя точного отсчета и с датчика 15 скорости малы, анализаторы 9 и 7 этих сигналов не срабатывают. В режиме отработки больших рассогласований с квазиоптималь- ным быстродействием, т.е. с максимально возможным малым временем отработки, задающий сигнал с первого 5 цифроаналогового преобразователя точного отсчета достаточно большой для срабатьюания первого 16 и второго 17 реле анализатора 7 ошибки. Одновременно сигнал с второго 6 циф- роаналогового преобразователя грубого отсчета (максимальное выходное напряжение которого соответствует углу 180 град) запоминается бло- ком 13 памяти. При этом выходное напряжение с блока 13 памяти составляет около половины сигнала рассог ла- сования, снимаемого с выхода второго цифроаналогового преобразователя грубого отсчета и подбирается при настройке системы. Таким образом, на выходе релейного элемента 14 формируется сигнал квазиоптимального управления.
Сигнал рассогласования с выхода первого 5 цифроаналогового преобразователя из-за размыкания нормально замкнутых контактов первогр 16 реле пойдет через резистор 18, следовательно, уменьшится коэффициент ления усилителя 10. Силовой следящий
привод начнет разгон объекта 4 управления. Затем, при достаточно большом сигнале с датчика 16 скорости, срабатывает релейный анализатор 9 скорости и обеспечивает прохождение сигнала управления на второй 11 сумматор. Объект 4 управления разгоняется с максимальным ускорением до момента отработки половины или несколько большего первоначального рассогласования.
в момент, когда сигнал с первого 12 сумматора изменит знак, т.е. когда сигнал с блока 13 памяти станет больше действующего рассогласования, релейный элемент 14 изменит знак квазиоптимального управления и объек 4 управления начнет тормозиться с максимально возможным ускорением до скорости , при которой сигнал с датчика 16 скорости будет настолько мал,
что релейный анализатор 9 скорости придет в исходное состояние. При этом силовой следящий привод будет отрабатывать оставшееся рассогласование
со скоростью, определяемой малым коэффициентом усиления усилителя IО.
В дальнейшем при малом рассогласовании сигнал с первого 5 цифроана- логового преобразователя точного отг счета уменьшится и релейный анализатор 7 опмбки переключит систему на работу с большим коэффициентом усиления. Первое 16 реле настроено на срабатывание при рассогласовании, которое несколько превьш1ает (на 0- 20%) линейную зону работы силоного следящего привода (например, .0,5- 0,7 град). Второе 17 реле настроено на срабатьтание при рассогласовании несколько превьш1ающем (на 10-20%) величины рассогласований (например, 5-7 град), которые отрабатьгааются без включения сигнала квазиоптимаЛь- ного управления и приходят в исходное состояние при згменьшении сигнала рассогласования. При этом блок 13 памяти готов для запоминания следующего значения сигнала грубого рас- |Согласования.
Таким образом, квазиоптимальный по быстродействию силовой следящий привод обеспечивает максимальную по быстродействию отработку больЙих рассогласований в режиме переброски и переключение на режим слежения в момент минимального запаса кинетической энергии объекта и зшравления, исключая тем самым перебеги согласованного положения.
1228070
Формул
и.зобретения
Силовой следящий привод, содержащий последовательно соединенные за- датчик входного сигнала и цифровой измеритель рассогласования, второй &ХОД которого подбслючен к выходу цифрового датчика положения,, соединенного с объектом управления, датчик скорости соединен с объектом управления, а также с выходом .силового привода объекта управления, отличающийся тем, что, с целью повышения быстродействия за счет реализации квазиоптимального закона управления, дополиителько введены первый цифроаналоговый преобразователь, релейный анализатор ошибки, релейный анализатор«скорости, усилитель, блок памяти, а также последовательно соединенные второй цифроакалоговый преобразователь, первый сумматор и второй сумматор, выход которого соединен с входом силового привода, а второй вход - через усилитель, релейный анализатор ошибки и первый цифроаналоговый преобразователь соединен с выходом цифрового измерителя рассогласования и входом второго цифроанало- гового преобразователя, выход которого соединен с вычитающим входом первого сумматора через блок памяти, .управляющий вход которого соединен с вторым выходом релейного анализатофа ошибки, выход датчика скорости соединен с управляющим входом релейного анализатора скорости.
ГЖ1 (ф I
J§. Lbf5d.J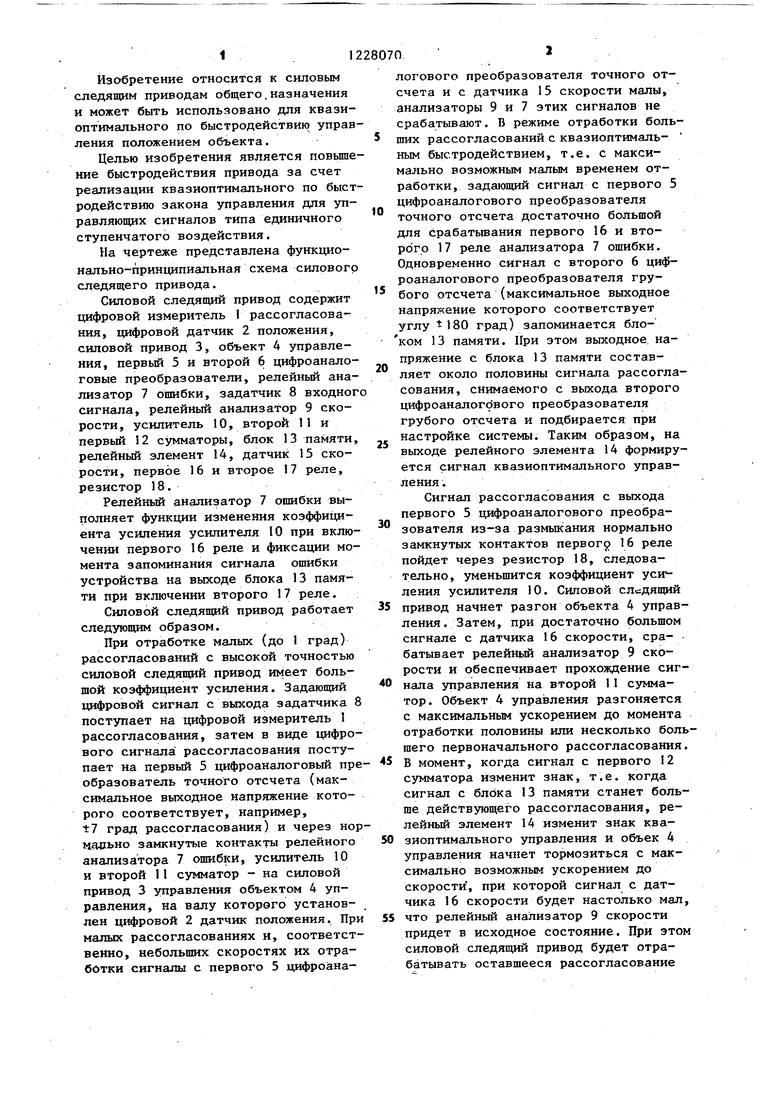
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой следящий привод | 1987 |
|
SU1425598A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Силовой следящий привод | 1987 |
|
SU1476430A2 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| Следящая система | 1990 |
|
SU1764030A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящая система | 1980 |
|
SU941925A1 |
Изобретение относится к силовым следящим приводам (ССП) общего назначения и может 0ыТь использовано для квазйоптимального по быстродействию управления положением объекта управления. Устройство содержит цифровой измеритель рассогласования, цифровой датчик положения, силовой привод, объект управления, первый и второй цифроаналоговые преобразователи, релейный анализатор ошибки, задатчик входного снгнала, релейный анализатор скорости, усилитель, второй и первый сумматоры, блок памяти, релейный элемент, датчик скорости, первое и второе реле, резистор. При отработке сигнала малого уровня ССП работает как простая следящая система, при отработке ступенчатого сигнала большого уровня релейиый анализатор ошибки обеспечивает, во-первых, уменьшение коэффициента усиления усилителя, во-вторых, запоминание на выходе блока памяти половины сигнала рассогласоваиия. В результате с релейного элемента через релейный лизатор скорости подается постоянное значение сигнала на разгон ССП с максимальным ускорением. Когда ССП отработает половину рассогласования, сигнал с выхода первого сумматора изменяет знак постоянного сигнала с выхода релейного элемента. В результате ССП будет тормозиться с максимальным замедлением. 1 ил. . (О ts9 to bio
Составитель Б. Кирсанов Редактор К. Волощук Техред И.Попович Корректор А. аимокосов
Заказ 2286/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприя тие, г.Ужгород, ул.Проектная, 4
| Теория автоматического управления | |||
| Нелинейные системы управления при случайных воздействиях/Под ред | |||
| А.В | |||
| Петушила | |||
| М.: Высшая школа, 1983 | |||
| Павлов А.А | |||
| Синтез релейных систем, оптимальных по быстродействию | |||
| М.: Паука, 1966, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
