Изобретение относится к области систем автоматического управления и регулирования, в частности к технике формирования управляющих сигналов, и может найти применение в робото-, аэрокосмической технике, следящих системах.
Известен способ автоматического управления, реализованный в нелинейной следящей системе для объекта второго порядка с автоматически изменяемыми жесткими отрицательными обратными связями по двум координатам. Данный способ заключается в суммировании сигнала задания с отрицательным сигналом, который формируют путем суммирования сигналов нелинейных обратных связей по координатам объекта, коэффициенты усиления которых с увеличением отклонений уменьшаются. При малых отклонениях обратные связи становятся линейными, причем главная обратная связь оказывается единичной (А.С. N 1559328 МКИ6 G 05 B 11/01. //А.А.Колесников, С.А.Бутенков и др. Нелинейная следящая система. Опубликовано 23.04.90. Бюллетень N 15).
Недостатком данного способа является низкая точность слежения, так как при малых скоростях максимальные коэффициенты жестких обратных связей ограничены условием устойчивости системы. К тому же данное решение конструктивно трудно осуществить, так как каждый нелинейный элемент обратной связи по соответствующей координате объекта должен иметь индивидуальную нелинейную характеристику и должен быть с регулируемой зоной линейности, управляемый разностью двух напряжений. Кроме того, в системах более высокого порядка применение данного способа затруднительно.
Известен способ автоматического управления, который выбран в качестве прототипа для заявляемого способа. Данный способ заключается в суммировании сигнала, пропорционального ошибке с линейной комбинацией двух сигналов нелинейных обратных связей по скорости, один из которых имеет зону ограничения, а другой - зону нечувствительности (А.С. N 292139 МКИ6 G 05 B 11/01. //В. Ф. Казмиренко, А. Н. Кузьмин и др. Следящая система. Опубликовано 06.01.71. Бюллетень N 4).
Несмотря на то, что данный способ управления более удачен, чем предшествующий, однако он имеет тот же недостаток: низкую точность слежения и невысокое быстродействие, так как и здесь при малых скоростях и малых рассогласованиях усиленный максимальный сигнал ошибки недостаточен для качественной работы следящей системы, так как линейно зависит от линейной комбинации сигнала задания и сигнала выходной координаты объекта управления и с уменьшением рассогласования также уменьшается пропорционально рассогласованию. К тому же данное решение характеризуется сложностью реализации нелинейной обратной связи. Кроме того, в системах более высокого порядка переходный процесс является колебательным, так как нелинейные обратные связи вводятся только по скорости.
Известна нелинейная следящая система, которая содержит последовательно соединенные задатчик, измеритель рассогласования, первый сумматор, второй сумматор, усилитель, исполнительный механизм и объект регулирования, датчики скорости и положения, входы которых соединены с выходом исполнительного механизма, первый нелинейный блок и первый источник опорного напряжения, причем первый вход первого нелинейного блока соединен с выходом усилителя, второй вход подключен к выходу первого источника опорного напряжения, а третий вход соединен с выходом датчика положения, выход первого нелинейного блока соединен с вторым входом первого сумматора, второй нелинейный блок и второй источник опорного напряжения, причем первый вход второго нелинейного блока соединен с выходом усилителя, второй вход подключен к выходу второго источника опорного напряжения, а третий вход соединен с выходом датчика скорости, выход второго нелинейного блока соединен со вторым входом второго сумматора (А.С. N 1559328 МКИ6 G 05 B 11/01. //А.А.Колесников, С.А.Бутенков и др. Нелинейная следящая система. Опубликовано 23.04.90. Бюллетень N 15).
Однако данное устройство не обеспечивает требуемой точности нелинейной следящей системы, так как при малых скоростях максимальные коэффициенты жестких обратных связей ограничены условием устойчивости системы. К тому же данное решение конструктивно трудно осуществить, так как каждый нелинейный блок должен иметь индивидуальную нелинейную характеристику и должен быть с регулируемой зоной линейности, управляемый разностью двух напряжений. Кроме того, в системах более высокого порядка применение данного устройства затруднительно.
Известна следящая система, которая взята в качестве прототипа для заявляемого устройства. Данная следящая система содержит измерители рассогласования, усилители, силовой привод, установленный на исполнительном валу тахогенератор, выход которого связан со входом двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной нечувствительности и усилителя, а другая - в виде последовательного соединения нелинейного звена с зоной ограничения и усилителя, а суммарный выход этих ветвей связан со входом силового привода.
Однако данное устройство также не обеспечивает требуемой точности и динамических характеристик нелинейной следящей системы, так как и здесь при малых скоростях и малых рассогласованиях усиленный максимальный сигнал ошибки недостаточен для качественной работы следящей системы, так как линейно зависит от линейной комбинации сигнала задания и сигнала выходной координаты объекта управления и с уменьшением рассогласования также уменьшается пропорционально рассогласованию. К тому же данное решение характеризуется сложностью реализации нелинейной обратной связи.
Задачей настоящего изобретения является повышение точности и улучшение быстродействия следящей системы путем автоматического добавления при малых рассогласованиях параллельно сигналу, пропорциональному первой координате, соответствующей ошибке, сигнала, пропорционального первой координате и имеющего ограничение по амплитуде, в системах порядка выше второго - путем дополнительной подачи сигналов обратных связей по координатам силового привода выше второй.
Данная задача решается тем, что в способе автоматического управления в нелинейной системе, заключающемся в суммировании сигнала, пропорционального первой координате с линейной комбинацией двух сигналов обратных связей по второй координате, один из которых имеет ограничение по амплитуде и подаче суммарного сигнала на вход силового привода, второй сигнал обратной связи по второй координате формируют пропорциональным этой координате, а на вход силового привода подают дополнительно сигнал, пропорциональный первой координате, имеющий ограничение по амплитуде. В системах порядка выше второго на вход силового привода дополнительно подают сигналы обратных связей по координатам силового привода выше второй, каждый из которых равен линейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй пропорционален этой координате.
Данный способ может быть использован в любой следящей системе для управления силовым приводом различного типа. Предлагаемый способ реализуется в нелинейной следящей системе, содержащей последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый усилитель, первый сумматор, силовой привод, тахогенератор, выход которого связан со входом двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной ограничения и второго усилителя, а в другую включен третий усилитель, выход которого является выходом этой ветви, а суммарный выход этих ветвей соединен со входом силового привода. В следящей системе дополнительно вход второй параллельной ветви соединен со входом третьего усилителя, а выход измерителя рассогласования связан через последовательно соединенные нелинейное звено с зоной ограничения и четвертый усилитель со входом силового привода. В следящую систему выше второго порядка дополнительно введены датчики координат силового привода выше второй, выход каждого из которых соединен через соответствующее нелинейное устройство обратной связи со входом силового привода, причем каждое нелинейное устройство обратной связи выполнено в виде двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной ограничения и одного усилителя, а другая - в виде другого усилителя.
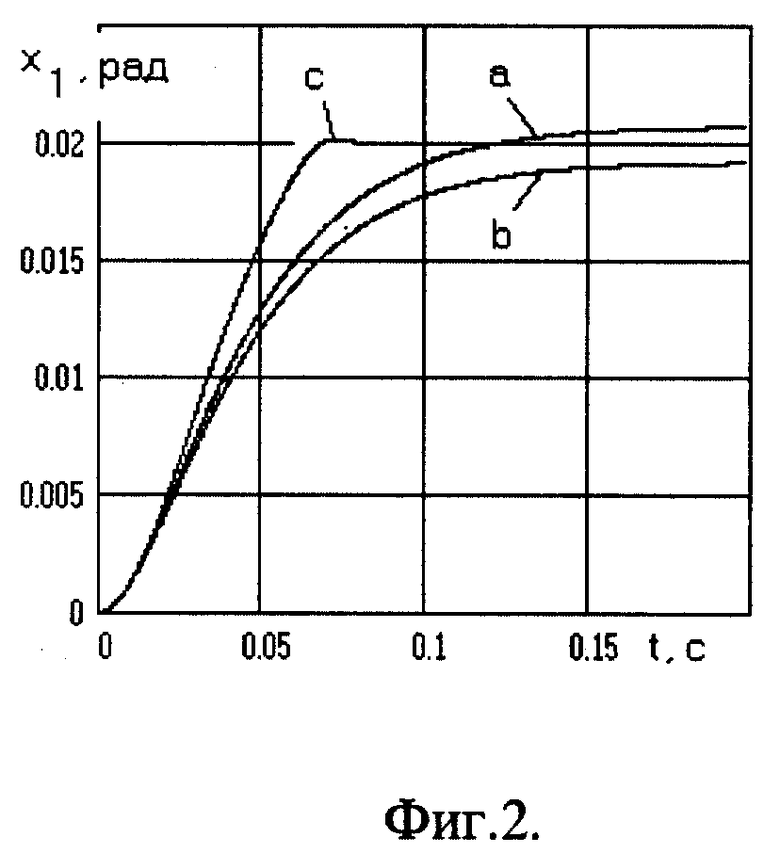
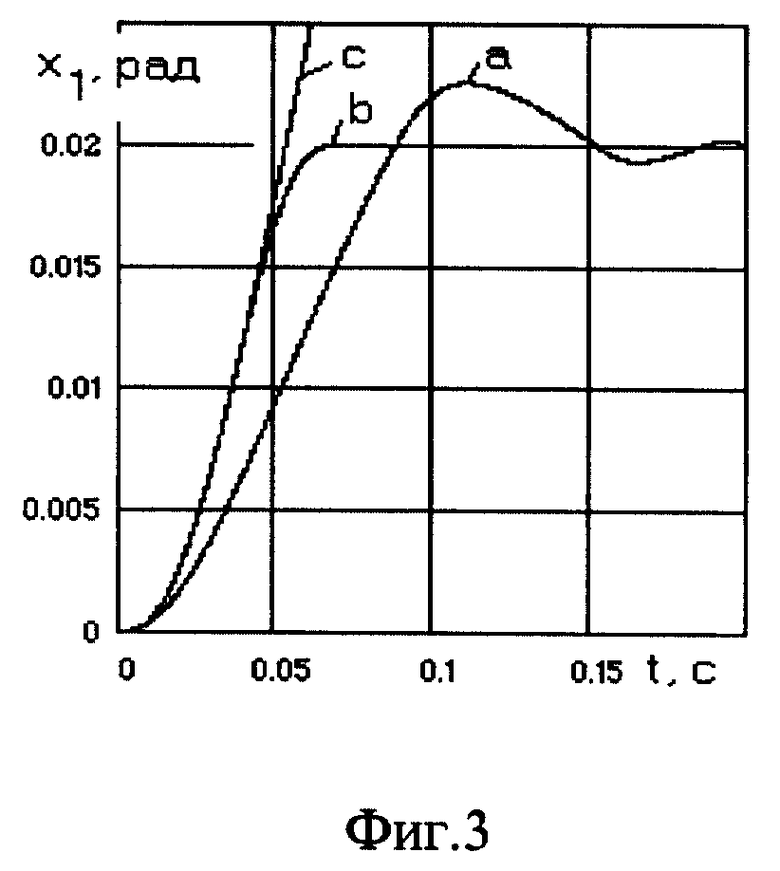
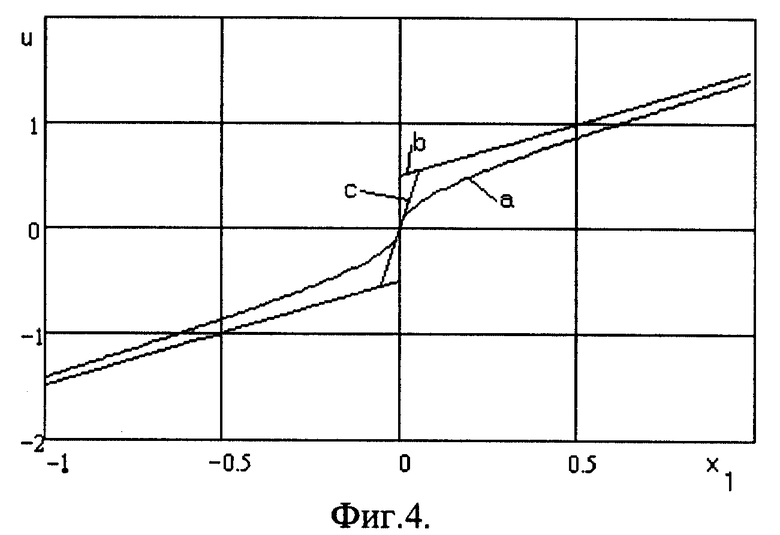
На фиг. 1 представлена структурная схема нелинейной следящей системы, реализующая способ автоматического управления в нелинейной системе; на фиг. 2 приведены временные диаграммы работы нелинейной следящей системы: а - с положительной нелинейной обратной связью по скорости (прототип), b - с отрицательной нелинейной обратной связью по скорости, с - предлагаемая система; фиг. 3 - временные диаграммы работы нелинейной следящей системы с силовым приводом третьего порядка: а - прототип, b - предлагаемая система, с - разгонная характеристика силового привода, характеризующая предельные динамические возможности силового привода; на фиг. 4 - графики функций управления силовым приводом первого порядка: а - оптимальное управление, b и c - квазиоптимальные управления.
В описании приняты следующие обозначения:
X0 - сигнал задающего воздействия;
X1, X2,..., Xn - координаты силового привода;
u - сигнал управления силового привода.
Система содержит последовательно соединенные измеритель рассогласования 1 сигнала задания и сигнала единичной главной обратной связи, первый усилитель 2, первый сумматор 3, силовой привод 4, тахогенератор 5, нелинейное устройство 6 обратной связи, выход тахогенератора связан со входом двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена 7 с зоной ограничения и второго усилителя 8, а в другую включен третий усилитель 9, выход которого является выходом этой ветви, а суммарный выход этих ветвей соединен со входом силового привода, причем вход второй параллельной ветви соединен со входом третьего усилителя, а выход измерителя рассогласования связан через последовательно соединенные нелинейное звено 10 с зоной ограничения и четвертый усилитель 11 со входом силового привода. В следящую систему дополнительно введены датчики координат 12 силового привода выше второй, выход каждого из которых соединен через соответствующее нелинейное устройство 6 обратной связи со входом силового привода. Каждое нелинейное устройство обратной связи 6 состоит из двух параллельных каналов: канала положительной или отрицательной обратной связи, выполненного в виде последовательного соединения нелинейного звена 7 с зоной ограничения и одного усилителя 8 и канала отрицательной обратной связи, выполненного в виде другого усилителя 9.
Система работает следующим образом.
Измеритель рассогласования 1 и тахогенератор 5 вырабатывают сигналы, с помощью которых после соответствующего усиления в усилителях 2, 8, 9 формируется управляющий сигнал на входе силового привода 4. При таком нелинейном преобразовании сигнала обратной связи при больших скоростях нелинейное звено 7 устраняет влияние канала с большим коэффициентом усиления усилителя 8, а на малых скоростях, когда сигнал с тахогенератора по второй координате становится меньше уровня ограничения нелинейного звена 7, возникает глубокая обратная связь по второй координате за счет большого коэффициента усиления усилителя 8. Однако такого управляющего сигнала на входе силового привода недостаточно для точной и быстрой отработки системой задающего входного воздействия как при положительном (фиг.2а), так и при отрицательном (фиг.2b) коэффициенте усиления усилителя 8. И в том, и другом случае на выходе появляется статическая ошибка, обусловленная недостаточным усилением сигнала первой координаты усилителем 2 на малых скоростях при малых рассогласованиях. Однако коэффициент усиления усилителя 2 для следящих систем ограничен необходимым требованием устойчивости. Поэтому предлагается на вход силового привода подавать дополнительно сигнал, пропорциональный первой координате, имеющий ограничение по амплитуде. В результате большого коэффициента усиления усилителя 11 в зоне малых скоростей при значениях ошибки меньше уровня ограничения нелинейного звена 10 на вход силового привода дополнительно подается корректирующий сигнал управления, который уменьшает статическую ошибку выходного сигнала и увеличивает быстродействие системы (фиг.2с).
Если силовой привод 4 второго порядка, то сформированного сигнала управления достаточно для того, чтобы силовой привод 4 быстро и точно отработал сигнал входного воздействия.
В действительности, даже в самом простейшем случае, когда силовой привод 4 представлен двигателем постоянного тока с управлением по якорной цепи, он имеет третий порядок, если учесть постоянную времени цепи якоря; четвертый порядок, если учесть постоянную времени регулируемого источника питания двигателя; пятый порядок, если в качестве источника питания выбрать электромашинный генератор (система Г-Д) или электромашинный усилитель (система ЭМУ-Д). В случае использования в силовом приводе 4 асинхронного двигателя, порядок может доходить до шести и более.
В системах порядка выше второго силовой привод 4 из-за своих инерционных свойств не точно отрабатывает сигнал входного воздействия, в результате чего наблюдаются автоколебания по окончании переходного процесса (фиг. 3а), что приводит к увеличению погрешности слежения и снижению точности отработки управляющего воздействия.
Для устранения автоколебаний и повышения точности слежения необходимо на вход силового привода дополнительно подавать сигналы обратных связей по координатам силового привода выше второй, каждый из которых равен линейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй пропорционален этой координате. В соответствии с предлагаемым способом в следящую систему дополнительно введены датчики координат силового привода выше второй, выход каждого из которых соединен через соответствующее нелинейное устройство обратной связи со входом силового привода, причем каждое нелинейное устройство обратной связи выполнено в виде двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной ограничения и одного усилителя, а другая - в виде другого усилителя. В результате дополнительной подачи сигналов обратных связей по координатам силового привода выше второй на вход силового привода появляется дополнительное демпфирование системы на малых скоростях при малых рассогласованиях, позволяющее устранить колебательность (фиг.3b).
Можно показать, что предлагаемая система управления является приближенно оптимальной по критерию вида
Рассмотрение данного критерия представляет интерес в связи с тем, что квадратичный критерий, в который входят только квадраты фазовых координат, придает завышенную роль большим  отклонениям системы от заданного положения, в то время как часто в равной мере нежелательны любые отклонения. Отметим, что для повышения точности слежения необходимо более интенсивно отрабатывать именно малые
отклонениям системы от заданного положения, в то время как часто в равной мере нежелательны любые отклонения. Отметим, что для повышения точности слежения необходимо более интенсивно отрабатывать именно малые  отклонения. Критерий качества (1) в определенной мере позволяет учитывать эти обстоятельства: перераспределением значений его весовых коэффициентов можно задать соответствующие предпочтения нежелательности как больших отклонений, определяемых коэффициентами qi при квадратичных составляющих критерия, так и малых отклонений, определяемых весами
отклонения. Критерий качества (1) в определенной мере позволяет учитывать эти обстоятельства: перераспределением значений его весовых коэффициентов можно задать соответствующие предпочтения нежелательности как больших отклонений, определяемых коэффициентами qi при квадратичных составляющих критерия, так и малых отклонений, определяемых весами  модульных составляющих критерия.
модульных составляющих критерия.
Наиболее просто показать оптимальность на примере системы управления объектом первого порядка
по критерию качества
Данный пример также обосновывает целесообразность использования предлагаемой нелинейной обратной связи по ошибке (основной выходной координате привода) для повышения быстродействия и точности его функционирования.
Задача управления (2), (3) при q2 = 0 точно аналитически решена в работе (Петров Ю.П. Вариационные методы теории оптимального управления. -Л.: Энергия, 1977. - 280 с.) на основе применения классического вариационного исчисления. Применив метод решения указанной работы к задаче при q2 ≠ 0, можно найти оптимальное управление вида
Данный закон обратной связи (фиг.4а) отличается относительной сложностью в реализации, причем указанный метод его определения нельзя применять к объектам высокого порядка по следующим двум причинам. Во-первых, для уравнений Эйлера-Пуассона выше второго порядка неизвестны, за редким исключением, первые интегралы, использованные при синтезе оптимального управления. Во-вторых, функция критерия  является негладкой, ее производная
является негладкой, ее производная  точке x = 0 имеет разрыв первого рода. В связи с этим, строго говоря, уравнение Эйлера-Пуассона нельзя применять к решению задач управления с функционалами вида (1), так как теоремы классического вариационного исчисления и принцип максимума Л.С.Понтрягина доказаны при условии непрерывности интегранта по совокупности переменных вместе со своими частными производными. По этим причинам ниже приводится способ приближенного решения вариационной задачи (2), (3), который легко распространяется на синтез систем управления высокого порядка. Способ основан на использовании классического вариационного исчисления после предварительной аппроксимации негладкой подынтегральной функции критерия
точке x = 0 имеет разрыв первого рода. В связи с этим, строго говоря, уравнение Эйлера-Пуассона нельзя применять к решению задач управления с функционалами вида (1), так как теоремы классического вариационного исчисления и принцип максимума Л.С.Понтрягина доказаны при условии непрерывности интегранта по совокупности переменных вместе со своими частными производными. По этим причинам ниже приводится способ приближенного решения вариационной задачи (2), (3), который легко распространяется на синтез систем управления высокого порядка. Способ основан на использовании классического вариационного исчисления после предварительной аппроксимации негладкой подынтегральной функции критерия  гладкой функцией вида
гладкой функцией вида
Здесь полиномиальное приближение используется лишь на малом интервале [-h, h] , h << xmax для "скругления угла" функции  Для обеспечения гладкости функции (5) ее коэффициенты находятся из условий
Для обеспечения гладкости функции (5) ее коэффициенты находятся из условий
или
Данной системе уравнений удовлетворяют параметры
Достоинство аппроксимации (5) состоит в том, что при уменьшении h ---> 0 она обеспечивает любую заданную точность приближения.
В соответствии с принятым видом аппроксимирующей функции (5) решение задачи оптимального управления необходимо последовательно проводить для двух интервалов  и
и  изменения аргумента. Для первого интервала при малых h--->0 функция (5) приближается к релейной характеристике. Поэтому для данного интервала система уравнений Эйлера записывается в форме
изменения аргумента. Для первого интервала при малых h--->0 функция (5) приближается к релейной характеристике. Поэтому для данного интервала система уравнений Эйлера записывается в форме
Замечаем, что нелинейная функция ϕ[x(t)] = sign(x(t)) уравнений (7) при изменении координаты объекта во времени имеет вид прямоугольных колебаний с заранее неизвестными моментами переключений. На этом основании в дальнейшем эту нелинейную функцию будем формально рассматривать как функцию только времени, описываемую выражением  причем параметр v1 в некоторые моменты времени меняет свое значение с ± 1 на ∓1. Подчеркнем, что возмущающую функцию v1(t) можно измерить непосредственно на объекте управления согласно уравнению
причем параметр v1 в некоторые моменты времени меняет свое значение с ± 1 на ∓1. Подчеркнем, что возмущающую функцию v1(t) можно измерить непосредственно на объекте управления согласно уравнению
v1(t) = sign(x(t)). (8)
Данное предположение позволяет перейти от решения нелинейной задачи управления (2), (3) к решению задачи оптимального комбинированного управления, которой соответствует линейная двухточечная краевая задача вида
В связи с этим дальнейший расчет параметров комбинированного управления
можно осуществить с использованием результатов теории линейных оптимальных систем (Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления. - М. : Наука, 1973. - с. 127-134) и установить, что при α1= 0 искомые коэффициенты принимают значения
Таким образом, данный подход к решению нелинейной задачи аналитического конструирования оптимального регулятора на интервале  приводит к управлению структуры (10), имеющей параметры (11).
приводит к управлению структуры (10), имеющей параметры (11).
На втором интервале  апроксимирующее выражение (5) является полиномиальным. В связи с этим на данном интервале можно определить, например, методом динамического программирования (Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления. - М.: Наука, 1973. -с. 127-134) квазиоптимальное управление также в полиномиальной форме. Объединив управления, полученные для различных интервалов аппроксимации (5), приходим к следующему закону управления
апроксимирующее выражение (5) является полиномиальным. В связи с этим на данном интервале можно определить, например, методом динамического программирования (Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления. - М.: Наука, 1973. -с. 127-134) квазиоптимальное управление также в полиномиальной форме. Объединив управления, полученные для различных интервалов аппроксимации (5), приходим к следующему закону управления
Закон управления (12) является некоторым приближением к оптимальному управлению (4). Его приближенный характер связан, во-первых, с заменой нелинейной функции sign[x(t)] экспоненциальной функцией времени и, во-вторых, с конечным значением параметра h аппроксимации (5). Если первую причину отклонения от оптимальности управления (12), имеющую методический характер, устранить нельзя, то вторую причину можно исключить, устремив параметр h к нулю:
При этом, как следует из соотношений (4), (12) значение управления при h ---> 0 приближается к нулю
В связи с этим нелинейное управление (13) хорошо описывается функцией
с параметром h ---> 0. Функции управления (13), (15), как показывают графики фиг. 4b, для (13) и фиг.4с для (15) являются соответствующими приближениями строго оптимального управления (4) на фиг.4а.
Данные графики построены при следующих значениях параметров объекта а = 0, b = 1 и функционала качества q1 = q2 = г = 1. Они свидетельствуют, что управления uk(x) и uksh(x) асимптотически приближаются к оптимальному управлению. Моделирование систем с квазиоптимальными алгоритмами управления uk(x) и uksh(x) показало, что они доставляют системам регулирования значения функционала качества, достаточно близкие к оптимальному, и при этом важно то, что они существенно увеличивают быстродействие и точность функционирования систем за счет неограниченного или достаточно большого при x=0 коэффициента усиления. При этом, главное, законы обратной связи uk(x) и uksh(x) допускают значительно более простую техническую реализацию в сравнении с оптимальным управлением uo(х): нелинейная часть управления uk(x) требует использования одного релейного элемента вместо сложного нелинейного преобразователя  необходимого для осуществления обратной связи (4). Указанные причины и предопределили рекомендацию квазиоптимальных законов управления uk(x) и uksh(x) к практическому применению, в частности, в обратной связи по основной выходной координате объекта.
необходимого для осуществления обратной связи (4). Указанные причины и предопределили рекомендацию квазиоптимальных законов управления uk(x) и uksh(x) к практическому применению, в частности, в обратной связи по основной выходной координате объекта.
Имеет важное практическое значение то обстоятельство, что предложенный способ синтеза квазиоптимальных обратных связей легко распространяется на объекты управления высокого порядка. С этой целью описание данных объектов представим в матричной форме
где X= (x1, x2,.., xn)T - вектор фазовых координат объекта, в частности  A1, B1 - постоянные матрицы параметров объекта размерности nxn, nx1.
A1, B1 - постоянные матрицы параметров объекта размерности nxn, nx1.
Для объекта (16) рассмотрим задачу аналитического конструирования регулятора, которая формулируется следующим образом: синтезировать регулятор, переводящий объект из начального состояния X(0) = X0 в конечное нулевое с минимальным значением функционала (6.10). Для решения данной вариационной задачи записываем уравнения Эйлера, определяющие необходимые условия экстремума функционала качества:
где
μ′(x) - производная функции (5), описывающей гладкую аппроксимацию функции 
В соответствии с методологией применяемого подхода синтеза заменяем нелинейную функцию  которая при малых значениях параметра h близка к релейной характеристике, функцией времени
которая при малых значениях параметра h близка к релейной характеристике, функцией времени
Соответственно нелинейную вектор-функцию Ф(Х) рассматриваем как возмущение следующей структуры
Элементы матрицы С определяются соотношением
Предполагается, что параметры vi, возмущения в некоторые моменты времени скачком меняют свои значения с ± на ∓1,, причем сами возмущения  можно непосредственно измерить на объекте управления в соответствии с уравнением (19).
можно непосредственно измерить на объекте управления в соответствии с уравнением (19).
Принятые предположения и замена (19), (20) сводят решение нелинейной задачи оптимального управления к решению линейной двухточечной краевой задачи
На основе решений краевой задачи можно определить (Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления. - М.: Наука, 1973. - с. 127-134) комбинированный закон оптимального управления
u(t)=Kx•X(t)+Kf•Fv(t). (23)
Его матричные параметры Кx, Kf можно рассчитать также решением матричного алгебраического уравнения Риккати.
Заменив в управлении (23) компоненты векторной функции возмущения Fv(t) их измерениями в соответствии с уравнением (19), приходим к следующему закону управления
Предельным значением управления (24) при h ---> 0 является закон обратной связи вида
Функция (25) описывает приближенное решение задачи оптимального управления по модульному критерию качества (1). В связи с этим коэффициенты обратной связи Kxi, Kfi можно также определить методом параметрической оптимизации критерия (1) по указанным коэффициентам в процессе моделирования замкнутой системы управления. Для объектов низкого порядка (n = 2,3) этот метод оказывается более простым и точным в сравнении с методом Р.Т. Янушевского или методами решения матричного уравнения Риккати.
Сравнение кривых переходных процессов, приведенных на фиг. 3, показывает, что предложенный способ управления (25) повышает быстродействие и точность функционирования следящей системы, приближая ее к оптимальной по быстродействию при достаточно простой схемной реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| Нелинейная следящая система | 1988 |
|
SU1559328A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
Изобретение относится к области систем автоматического управления и регулирования, в частности к технике формирования управляющих сигналов, и может найти применение в робото-, аэрокосмической технике, следящих системах. Технический результат изобретения заключается в повышении точности и улучшении быстродействия следящей системы. Отличительной особенностью способа является то, что при суммировании сигнала, пропорционального первой координате, соответствующей ошибке, с линейной комбинацией двух сигналов обратных связей по второй координате, соответствующей скорости силового привода, один из которых имеет ограничение по амплитуде, и подаче суммарного сигнала на вход силового привода, второй сигнал обратной связи по второй координате формируют пропорциональным этой координате, а на вход силового привода подают дополнительно сигнал, пропорциональный первой координате, имеющий ограничение по амплитуде. В системах порядка выше второго на вход силового привода дополнительно подают сигналы обратных связей по координатам силового привода выше второй, каждый из которых равен нелинейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй пропорционален этой координате. Следящая система для осуществления способа содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый усилитель, первый сумматор, силовой привод, тахогенератор, две параллельно соединенные ветви, одна из которых содержит нелинейное звено с зоной ограничения и второй усилитель, а другая - третий усилитель, а также нелинейное звено с зоной ограничения. 2 с. и 2 з. п. ф-лы, 4 ил.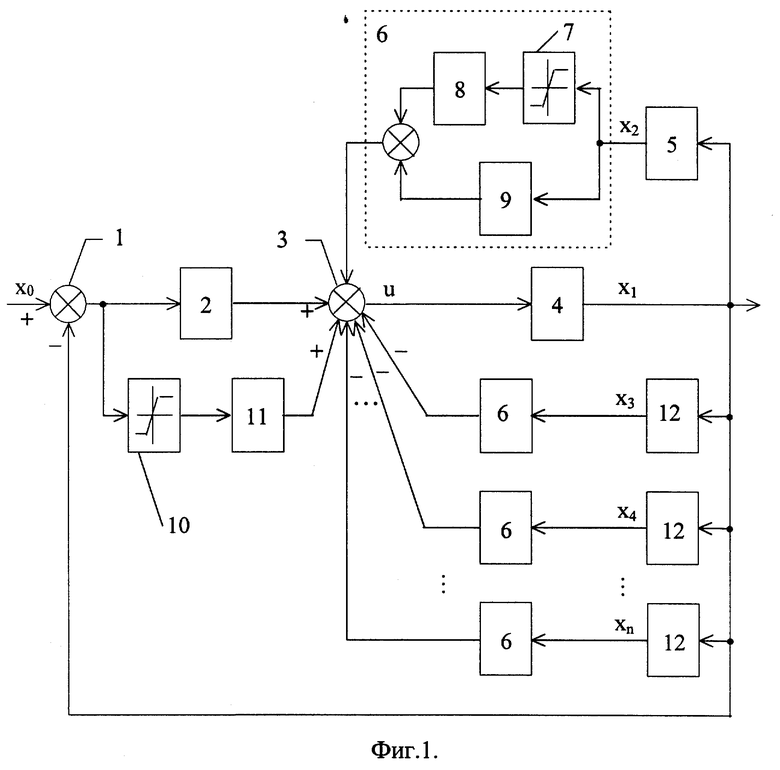
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU292139A1 |
| Нелинейная следящая система | 1988 |
|
SU1559328A2 |
| Следящая система | 1983 |
|
SU1142811A1 |
| US 3794817 A, 26.02.1974 | |||
| US 3906196 A, 16.09.1975. | |||
