| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Силовой следящий привод | 1987 |
|
SU1425598A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Следящая система | 1990 |
|
SU1764030A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Следящая система | 1985 |
|
SU1267355A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
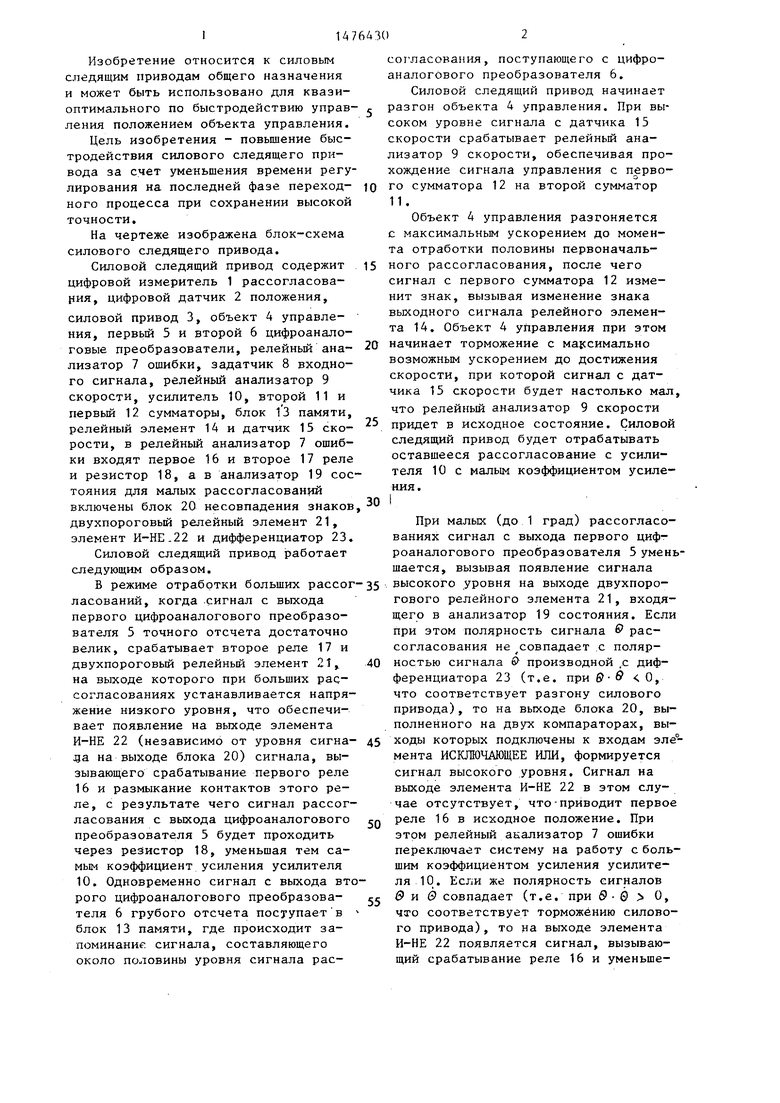
Изобретение относится к силовым следящим приводам общего назначения и может быть использовано для квазиоптимального по быстродействию управления положением объекта управления. Цель изобретения - повышение быстродействия за счет уменьшения времени регулирования на последней фазе переходного процесса при сохранении высокой точности. Силовой следящий привод содержит цифровой измеритель 1 рассогласования, цифровой датчик 2 положения, силовой привод 3, объект 4 управления, первый 5 и второй 6 цифроаналоговые преобразователи, релейный анализатор 7 ошибки, задатчик 8 входного сигнала, релейный анализатор 9 скорости, усилитель 10, второй 11 и первый 12 сумматоры, блок 13 памяти, релейный элемент 14, датчик 15 скорости. При этом релейный анализатор ошибки состоит из первого 16 и второго 17 реле и резистора 18, а в анализатор 19 состояния для малых рассогласований входят блок 20 несовпадения знаков, двухпороговый релейный элемент 21, элемент И-НЕ 22 и дифференциатор 23. 1 ил.
| Проектирование следящих систем./ Под ред.Л.В.Рабиновича | |||
| М.: Машиностроение, 1969, с.216-218, рис.4-2 | |||
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
