Изобретение относится к области систем автоматического управления и регулирования, в частности к технике формирования управляющих сигналов, и может найти применение в робототехнике, следящих системах, автоматических регуляторах.
Известен способ автоматического управления, реализованный в нелинейной следящей системе для объекта второго порядка (А.С. №292139, МКИ6 G05B 11/01 от 06.01.71). Данный способ заключается в суммировании сигнала, пропорционального ошибке с линейной комбинацией двух сигналов нелинейных обратных связей по скорости, один из которых имеет зону ограничения, а другой - зону нечувствительности.
Недостатком данного способа является низкая точность слежения и невысокое быстродействие, так как максимальные значения коэффициентов жестких обратных связей ограничены условием устойчивости системы и при малых скоростях и малых рассогласованиях усиленный максимальный сигнал ошибки недостаточен для качественной работы следящей системы - он линейно зависит от линейной комбинации сигнала задания и сигнала выходной координаты объекта управления и с уменьшением рассогласования также уменьшается пропорционально рассогласованию. Кроме того, в системах более высокого порядка переходный процесс является колебательным, так как нелинейные обратные связи вводятся только по скорости.
Известен способ автоматического управления (Патент РФ №2149437, МПК7 G05В 11/01 от 20.05.2000), выбранный в качестве наиболее близкого аналога для заявляемого способа, который заключается в подаче на вход силового привода сигналов обратных связей по первой, второй и выше координатам силового привода, каждый из которых равен линейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй - пропорционален этой координате.
Несмотря на то что данный способ управления более удачен, чем предшествующий, однако он имеет следующие недостатки. Во-первых, суммарный сигнал параллельно работающих нелинейных устройств обратной связи по каждой координате привода не ограничен по величине, что противоречит известному факту о релейном (ограниченном) характере оптимального по быстродействию управления. Во-вторых, параллельное включение устройств обратных связей не позволяет увеличивать быстродействие привода с учетом наличия ограничений на координаты привода.
Известна нелинейная следящая система (А.С. №292139, МКИ6 G05B 11/01 от 06.01.71), которая содержит измеритель рассогласования сигнала задания и сигнала единичной обратной связи, усилители, силовой привод, установленный на исполнительном валу тахогенератор, выход которого связан со входом двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной нечувствительности и усилителя, а другая - в виде последовательного соединения нелинейного звена с зоной ограничения и усилителя, а суммарный выход этих ветвей связан со входом силового привода.
Однако данное устройство не обеспечивает требуемой точности и быстродействия нелинейной следящей системы, так как при малых скоростях и малых рассогласованиях усиленный максимальный сигнал ошибки недостаточен для качественной работы следящей системы вследствие линейной зависимости от линейной комбинации сигнала задания и сигнала выходной координаты объекта управления. К тому же данное решение характеризуется определенной сложностью реализации нелинейной обратной связи.
Известна следящая система (Патент РФ №2149437, МПК7 в G05В 11/01 от 20.05.2000), которая выбрана в качестве наиболее близкого аналога для заявляемого устройства. Данная следящая система содержит силовой привод, тахогенератор, датчики координат привода, измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи и нелинейные устройства обратной связи по каждой координате привода, выполненные с использованием сумматора в виде двух параллельно соединенных ветвей, причем одно из них реализуется в виде последовательного соединения нелинейного звена с зоной ограничения и первого усилителя, а другая - в виде другого усилителя.
Данное устройство не может обеспечить быстродействия, близкого к предельному, по следующим причинам. Во-первых, суммарный сигнал параллельно работающих нелинейных устройств обратной связи по каждой координате привода не ограничен по величине, хотя известно, что управляющий сигнал в оптимальном по быстродействию приводе не превышает максимального питающего напряжения. Во-вторых, параллельное включение устройств обратных связей не позволяет увеличивать быстродействие привода с учетом наличия ограничений на координаты привода.
Технической задачей настоящего изобретения является повышение быстродействия следящей системы с выполнением имеющихся ограничений на координаты привода.
Поставленная техническая задача в изобретении решается тем, что:
- в предлагаемом способе автоматического управления в нелинейной системе, заключающемся в применении сигналов обратных связей по первой, второй и выше координатам силового привода, формируемых нелинейными устройствами обратных связей, каждый из которых равен линейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй - пропорционален этой координате, сигнал обратной связи по каждой координате привода ограничивают на требуемом уровне введением дополнительного звена с зоной ограничения, при этом сигналы обратных связей по второй и выше координатам силового привода формируют вычитанием из сигнала выхода предшествующего описанного нелинейного устройства обратной связи сигнала датчика данной координаты и подают полученную разность на вход последующего устройства обратной связи;
- в предлагаемой следящей системе, содержащей силовой привод, датчики координат привода, измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи и нелинейные устройства обратной связи по каждой координате привода, выполненные с использованием сумматора в виде двух параллельно соединенных ветвей, одна из которых реализована в виде последовательного соединения нелинейного звена с зоной ограничения и первого усилителя, а другая - в виде другого усилителя, выход сумматора каждого нелинейного устройства обратной связи соединяется с входом введенного в него нелинейного звена с зоной ограничения, при этом в следящую систему дополнительно введены измерители рассогласования для второй и выше координат привода, отрицательные входы которых соединены с датчиками, а их положительные входы - с выходами нелинейного устройства обратной связи предшествующей координаты привода.
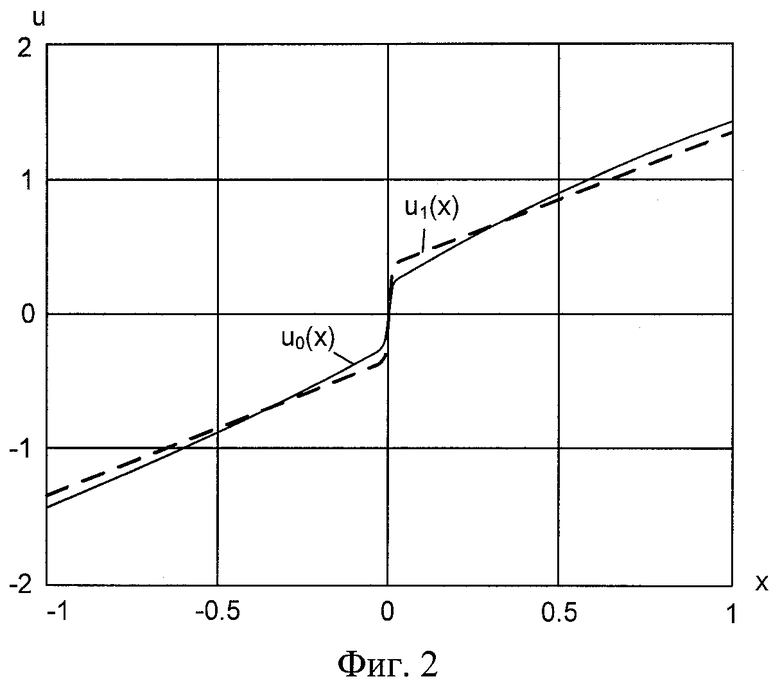
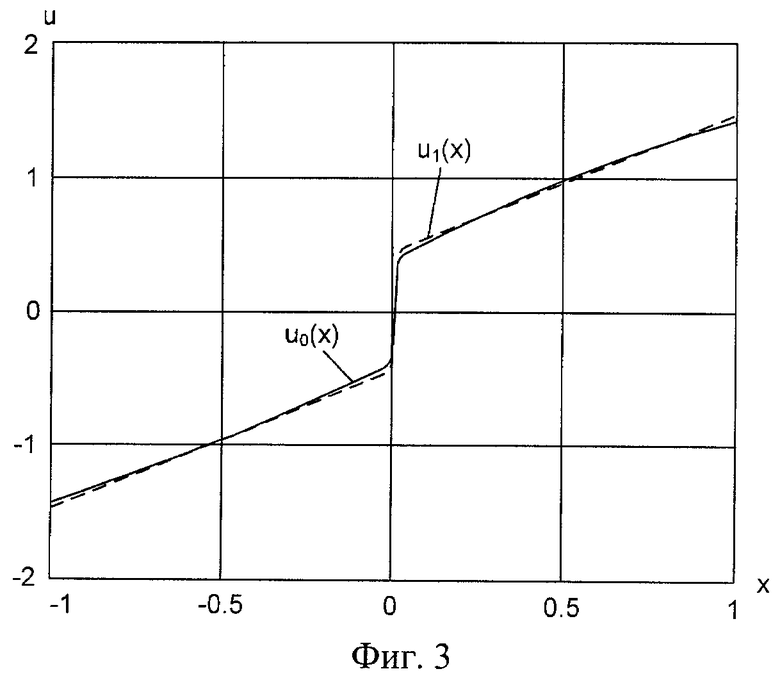
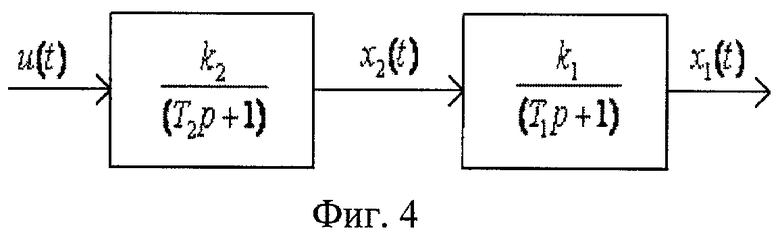
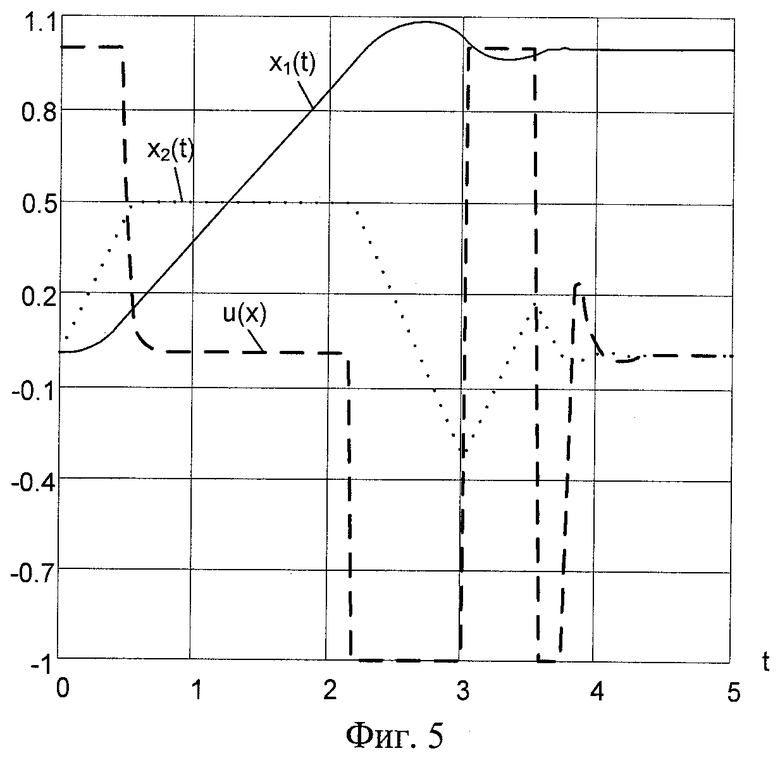
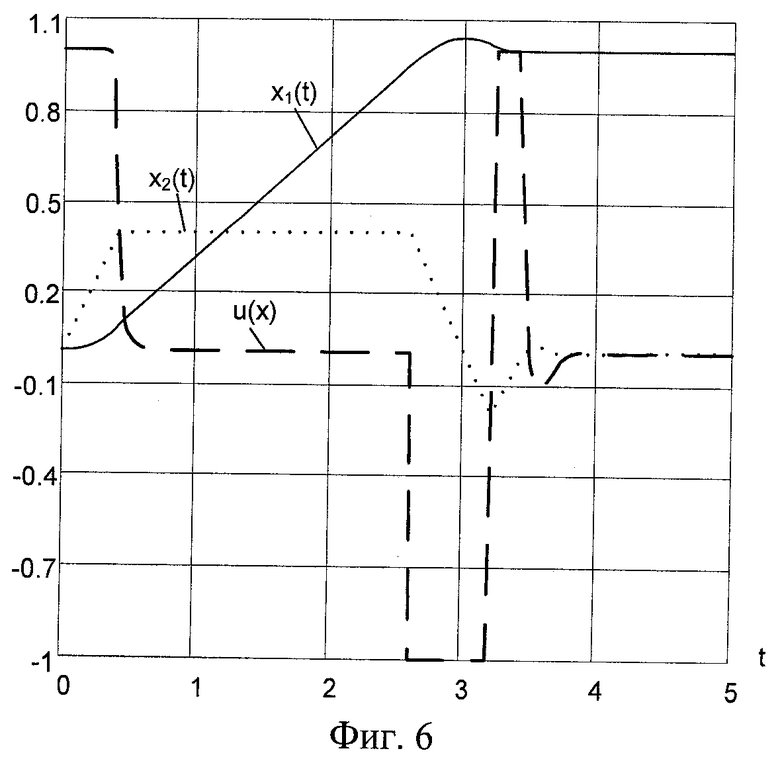
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема нелинейной следящей системы, реализующая способ автоматического управления в нелинейной системе; на фиг.2, фиг.3 - графики функций управления силовым приводом первого порядка со значениями параметра q0=0.04 и q0=0.16 соответственно (сплошная линия - оптимальное управление, пунктирная линия - квазиоптимальное управление); на фиг.4 - структура рассматриваемого объекта управления второго порядка; на фиг.5, фиг.6 приведены результаты моделирования предлагаемой следящей системы, при х2mах=0.4 и х2mах=0.5 соответственно, где координаты x1(t) - сплошная линия, x2(t) - линия из точек и сигнал управления u(t) - пунктирная линия.
В описании приняты следующие обозначения:
х0 - сигнал задающего воздействия;
t - время;
x1(t), x2(t), …, xn(t) - координаты силового привода;
u(t) - сигнал управления силового привода;
Kf, Kx - коэффициенты обратных связей;
h - ширина зоны линейности звена с зоной ограничения;
k1, k2 - коэффициенты усиления объекта управления;
T1, Т2 - постоянные времени объекта управления.
Следящая система содержит силовой привод 1, датчики 2 координат привода, измеритель рассогласования 3 сигнала задания x0 и сигнала единичной главной обратной связи x1 и нелинейные устройства обратной связи 4 по каждой координате привода, выполненные с использованием сумматора 5 в виде двух параллельно соединенных ветвей, одна из которых реализуется в виде последовательного соединения нелинейного звена с зоной ограничения 6 и первого усилителя 7, а другая - в виде другого усилителя 8, причем выход сумматора 5 каждого нелинейного устройства обратной связи соединяется с входом дополнительно введенного в него нелинейного звена с зоной ограничения 9. В следящую систему для последовательного включения описанных нелинейных устройств обратной связи дополнительно введены измерители рассогласования 10, 11, 12 для второй и выше координат привода соответственно, отрицательные входы которых соединены с датчиками 2, а их положительные входы - с выходами нелинейного устройства обратной связи предшествующей координаты привода.
Можно показать, что предлагаемая система управления является приближенно оптимальной по критерию вида

где q0 qi,  , r - заданные весовые коэффициенты функционала качества. Данный критерий отличается от используемого в прототипе функционала одним слагаемым q0, определяющим быстродействие проектируемой системы.
, r - заданные весовые коэффициенты функционала качества. Данный критерий отличается от используемого в прототипе функционала одним слагаемым q0, определяющим быстродействие проектируемой системы.
Наиболее просто показать оптимальность на примере системы управления объектом первого порядка с параметрами а и b
 ,
, 
и критерием качества

Данный пример также обосновывает целесообразность использования предлагаемого нелинейного устройства обратной связи по ошибке (основной выходной координате привода) для повышения быстродействия функционирования системы.
Задача управления (2), (3) при q0=q2=0 и отсутствии ограничений на сигнал управления точно аналитически решена в работе [Петров Ю.П. Вариационные методы теории оптимального управления. - Л.: Энергия, 1977. - 280 с.] на основе применения классического вариационного исчисления. Применив метод решения указанной работы к задаче при q0≠q2≠0, можно найти управление вида

Если учесть в решаемой задаче наличие ограничения  , то в соответствии с результатами работы [Дроздов В.П., Мирошник И.В., Скорубский В.И. Системы автоматического управления с микроЭВМ. - Л.: Машиностроение, 1989. - 286 с.] находим оптимальное управление вида
, то в соответствии с результатами работы [Дроздов В.П., Мирошник И.В., Скорубский В.И. Системы автоматического управления с микроЭВМ. - Л.: Машиностроение, 1989. - 286 с.] находим оптимальное управление вида

где
стандартная в теории управления функция.
Данный закон обратной связи отличается относительной сложностью в реализации, причем указанный метод его определения невозможно применить к объектам высокого порядка. Для упрощения реализации нелинейного управления (5) воспользуемся предложенной в описании прототипа при q0=0 аппроксимацией функции (4):
uh(x)=Kx·x+Kf·sath(x); 
с соответствующими значениями коэффициентов Кx, Kf и h. Функция sath(x) описывает алгоритм функционирования соответствующего звена с зоной ограничения, работа которого при малых значениях параметра h→0 эквивалентна релейному элементу.
Уточняя значения коэффициентов Кx, Kf, указанных в описании прототипа, с учетом наличия весового коэффициента q0≠0, получаем
Таким образом, квазиоптимальный закон управления объектом (2) по критерию (3), приспособленный для реализации на элементах аналоговой техники, описывается выражением

с параметрами (8). Подчеркнем, что функцией (9) описывается алгоритм функционирования нелинейных устройств обратной связи, применяемых в предлагаемом способе управления, реализуемого с использованием двух усилителей и двух звеньев с зоной ограничения.
Предельно простая функция управления (7) (пунктирная линия), как показывают графики фиг.2, является относительно хорошим приближением строго оптимального управления (4) (сплошная линия). Данные графики построены при следующих значениях параметров объекта а=0, b=1, h=0.01 и функционала качества q1=q2=r=1. Они также свидетельствуют, что при больших значениях весового коэффициента q0 точность приближения аппроксимации (7) повышается. Моделирование систем с квазиоптимальными алгоритмами управления (7) и (9) показало, что они имеют значения функционала качества достаточно близкие к оптимальному значению, и при этом важно то, что быстродействие оптимальной и квазиоптимальной систем практически одинаковы. При этом подчеркнем, что закон обратной связи (9) допускает значительно более простую техническую реализацию в сравнении с оптимальным управлением (5). Указанные причины предопределили рекомендацию квазиоптимального закона управления (9) к практическому применению, в частности, в обратной связи по основной, выходной координате объекта.
Теперь проведем обоснование структуры системы управления высокого порядка, начав с системы для объекта второго порядка, описываемого, например, передаточной функцией W(p)=k/(T1p+1)(T2p+1). Предположим, что данный объект описывается структурой фиг.3 и соответственно дифференциальными уравнениями
Согласно фиг.3 будем рассматривать сигнал x2(t) как сигнал управления для объекта с передаточной функцией W1(p)=k1/(T1p+1).
Применяя к этому объекту результат (9), найдем промежуточное управление

где функция F1 описывается выражением (9), в котором параметры соответствуют передаточной функции W1(p) и Um=x2mах.
Сигнал (11) мы должны сформировать за счет изменения реального управления u(t) подобъектом первого порядка (10 б). С этой целью им будем управлять по критерию (3), стремясь на выходе подобъекта (10 б) получить сигнал, равный значению (11), т.е. сигнал (11) будем рассматривать как сигнал задания

для переменной x2(t). Если сигнал (12) изменяется достаточно медленно по сравнению с x1(t) (что приближенно возможно, если T1>>T2), то решение последней задачи управления описывается уравнением

где функция F2 определяется выражением (9), в котором параметры соответствуют передаточной функции W2(р)=k2/(Т2р+1).
Закон обратной связи (13) полностью соответствует структуре предлагаемой системы управления фиг.1 для объекта второго порядка. Обобщение управления (13) на объекты высокого порядка не вызывает принципиальных затруднений, если структуру объекта можно представить последовательным соединением звеньев первого порядка. Такими объектами качественное управление обеспечивает система со структурой фиг.1.
Работа следящей системы, с учетом вышеприведенного описания, реализующей способ автоматического управления в нелинейной системе, заключается в следующем. Измеритель рассогласования 3 вырабатывает сигнал, который поступает на вход двух параллельно соединенных ветвей, одна из которых реализуется в виде последовательного соединения нелинейного звена с зоной ограничения 6 и первого усилителя 7, а другая - в виде другого усилителя 8. В этом случае, при больших рассогласованиях сигналов привода, нелинейное звено с зоной ограничения 6 устраняет влияние канала с большим коэффициентом усиления первого усилителя 7, а при малых скоростях, когда сигнал по второй координате становится меньше уровня ограничения нелинейного звена с зоной ограничения 6, возникает глубокая обратная связь за счет большого коэффициента усиления первого усилителя 7, которая способствует относительно точной и быстрой отработке системой задающего входного воздействия. Сумма сигналов обоих параллельно соединенных ветвей поступает на вход дополнительного звена с зоной ограничения 9, не допускающего превышения выходной координатой нелинейного устройства обратной связи 4 заданного уровня Umax. Установкой в нелинейных устройствах обратной связи 4 по каждой координате привода значений Umax=ximax, i=1, 2, …, n обеспечивают требуемые предельные ограничения фазовых координат xi(t) объекта. Действительно, так как нелинейные устройства обратной связи 4 по каждой координате привода включены последовательно, то достижение координатой хi(t) объекта значения ximах воспринимается последующим (i+1) нелинейным устройством обратной связи как задание данной координаты, настроенное на устойчивую, качественную отработку этого задания. Выставленные ограничения координат ximах, i=1, 2, …, n будут выполняться для всех режимов работы следящей системы, если соответствующим выбором значений коэффициентов Кx, Kf обратных связей обеспечены апериодические переходные процессы системы.
На фиг.4 представлены результаты моделирования описанной квазиоптимальной системы управления объектом W1(p)=1/р2,  по критерию быстродействия (q0=1, а остальные весовые коэффициенты функционала (1) равны нулю) с законом обратной связи
по критерию быстродействия (q0=1, а остальные весовые коэффициенты функционала (1) равны нулю) с законом обратной связи

зоной ограничения, при этом в следящую систему дополнительно введены измерители рассогласования для второй и выше координат привода, отрицательные входы которых соединены с датчиками, а их положительные входы - с выходами нелинейного устройства обратной связи предшествующей координаты привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Нелинейная следящая система | 1988 |
|
SU1559328A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Следящая система | 1990 |
|
SU1764030A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292139A1 |
Изобретение относится к области систем автоматического управления и регулирования, в частности к технике формирования управляющих сигналов, и может найти применение в робототехнике, следящих системах, автоматических регуляторах. Технический результат - повышение быстродействия следящей системы с выполнением имеющихся ограничений на координаты привода. Следящая система содержит силовой привод, датчики координат привода, измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи и нелинейные устройства обратной связи по каждой координате привода. Последние выполнены с использованием сумматора в виде двух параллельно соединенных ветвей. Одна ветвь реализована в виде последовательного соединения нелинейного звена с зоной ограничения и первого усилителя, а другая - в виде другого усилителя. Выход сумматора каждого нелинейного устройства обратной связи соединяется с входом введенного в него нелинейного звена с зоной ограничения. В следящую систему дополнительно введены измерители рассогласования для второй и выше координат привода, отрицательные входы которых соединены с датчиками, а их положительные входы - с выходами нелинейного устройства обратной связи предшествующей координаты привода. 2 н.п. ф-лы, 6 ил.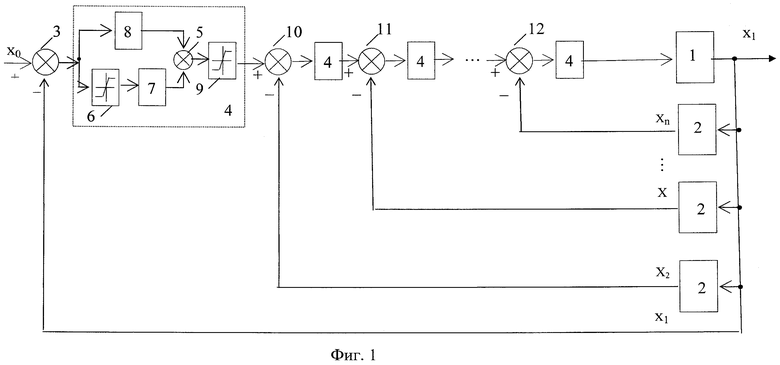
1. Способ автоматического управления в нелинейной системе, заключающийся в применении сигналов обратных связей по первой, второй и выше координатам силового привода, формируемых нелинейными устройствами обратных связей, каждый из которых равен линейной комбинации двух сигналов, один из которых имеет ограничение по амплитуде соответствующей координаты, а второй пропорционален этой координате, отличающийся тем, что сигнал обратной связи по каждой координате привода ограничивают на требуемом уровне введением дополнительного звена с зоной ограничения, при этом сигналы обратных связей по второй и выше координатам силового привода формируют вычитанием из сигнала выхода предшествующего описанного нелинейного устройства обратной связи сигнала датчика данной координаты и подают полученную разность на вход последующего устройства обратной связи.
2. Следящая система, содержащая силовой привод, датчики координат привода, измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи и нелинейные устройства обратной связи по каждой координате привода, выполненные с использованием сумматора в виде двух параллельно соединенных ветвей, одна из которых реализована в виде последовательного соединения нелинейного звена с зоной ограничения и первого усилителя, а другая - в виде другого усилителя, отличающаяся тем, что выход сумматора каждого нелинейного устройства обратной связи соединен с входом введенного в него нелинейного звена с зоной ограничения, при этом в следящую систему дополнительно введены измерители рассогласования для второй и выше координат привода, отрицательные входы которых соединены с датчиками координат привода, а их положительные входы - с выходами нелинейного устройства обратной связи предшествующей координаты привода.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| US 6591395 B1, 08.07.2003 | |||
| US 3906196, 16.09.1975 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЦИКЛИЧЕСКИХ ДИМЕРОВ СТИРОЛА | 2007 |
|
RU2354638C1 |

