Изобретение относится к автоматике и предназначено для использования в следящих системах, системах стабилизации метательных аппаратов, в приводах промышленных роботов-манипуляторов и металлорежущих станков, в электронно-лучевых установках, сварочных и чертежных машинах, в фотолитографическом оборудовании, автоматических компенсаторах и т.д.
Известна следящая система, содержащая последовательно соединеннйе первую схему логического сложения объект управления, нелинейный преобразователь, дифференциатор, вторую схему логического сложения и первое реле, контакты которого подключены ко входу первой схемы логического сложения непосредственно и через контакты второго реле, вход которого соединение выходом объекта упразвления 11}.
. Недостатком такой системы является низкая точность, обусловленная;не-;устойчивостью скстема в окрестности положения равновесия.
Наиболее близкой по технической сущности к предложенной является следящая система, содержащая последОва тельно соединенные элемент сравнения.
сумматор, исполнительный привод, объект управления, дифференциатор и .функциональный преобразователь, выход которого подлючен ко второму входу сумматора, выход объекта управления соединен с вычитающим входе элемента сравнения 21.
, Недостатком известной сист««л Является низкая точность. Это объясняеггся неустойчивостью и наличием автоколебаний в окрестности заданного
ХХ5СТОЯНИЯ.
Пель изобретения - повьвиение точности системы за счет введения в окрестности тюлрженпя равновесия зоны линейности и обеспечения его устрй- . чивости
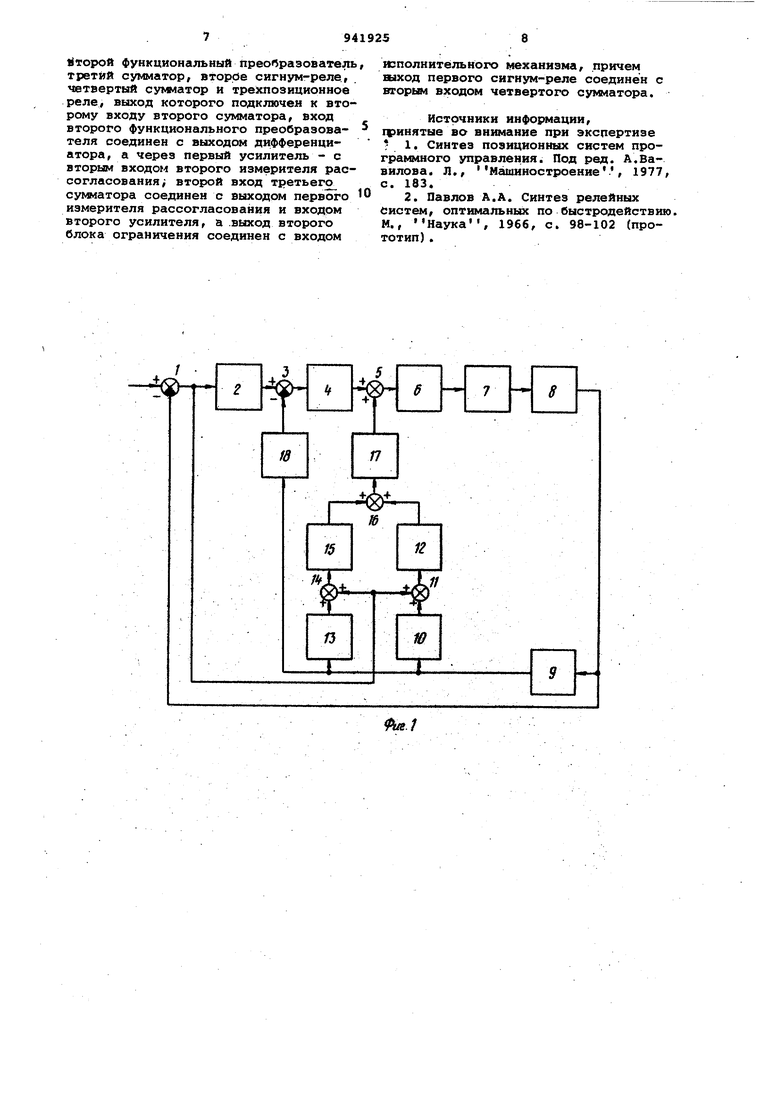
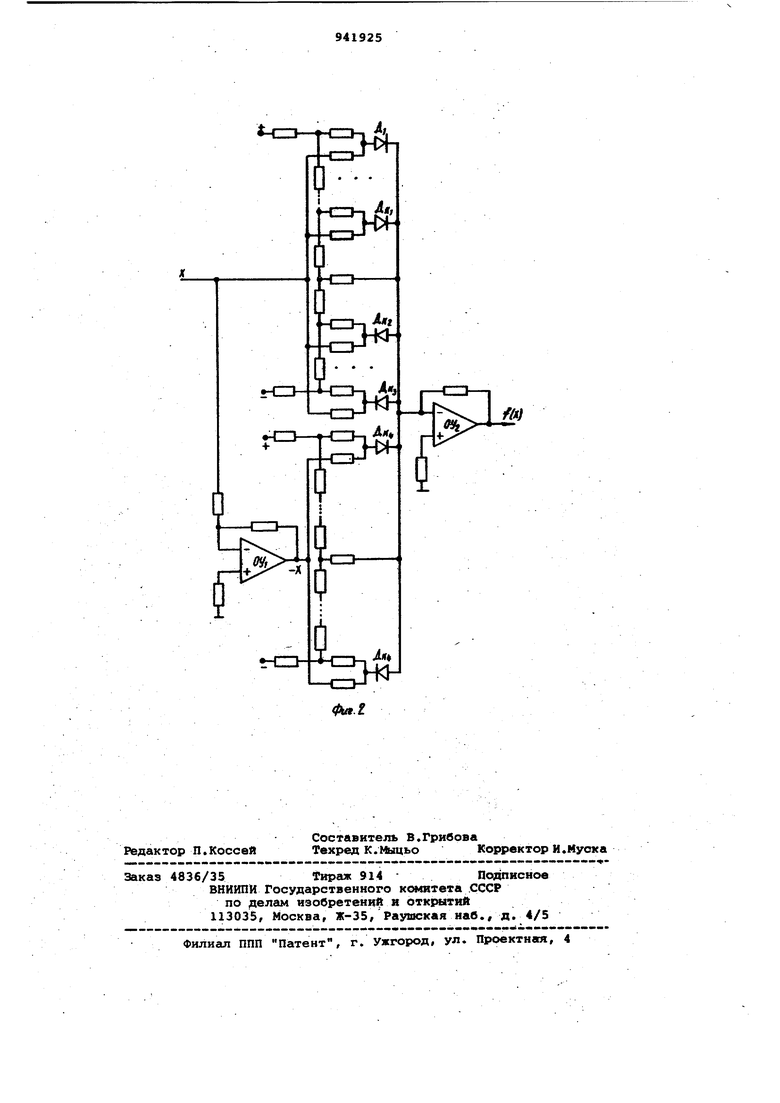
Поставленная цель достигается тем, 2Q что в систему, содержащую исполнительный механизм, подклпгченный к объа ту, выход которого соединен со вторам входом первого измерителя рассог всования, а через последовательносоединенные дифференциатор, функциональный преобразователь, первый сумjiHTop - со входом первого сигнум-реле, второй вход первого сумматора соединен с выходом первого измерителя рассогласования, введены первый усилитель, последовательно соединенные второй усилите ль f BTopqjA измеритель рассогласования, лервьтй.блок ограничения, второй cynwatop и второй блок сграгничения, а также последовательно соединенные второй функциональный преобразователь, третий сумматор сигнум-реле, четвертый сумма тор и трехпоэиционное реле, выход . которого подключен к второму входу второгр cyMt aTopa, вход втррого функ ционального преобраэоват я соединен с1вькодом дифференциатора, а через первый усилитель - со .вторым входом второго измерителя рассогласования, второй вход третьего сумматора соединен с выходом первого измерителя рассогласования и входом второго усилителя, а выход второго блока- . ограничения соединен со входом исполнительного механизма, причем выход первого сигнум-реле соединен со втррым входом четвертого сумматора. На фиг. 1 представлена блок-схема системы;.на фиг. 2 - схема функционального преобразователя. Система содержит первый измеритель 1 рассогласования, усилитель 2, второй измеритель 3 рассогласованияf первый блок 4 Ограничения, второй сумматор 5, второй блок ограничения б, исполнительный механизм 7 объект управления 8, дифференциатор 9,, пер вый функциональный преобразователь 10, первый сумматор 11, первое сигнум-реле 12, второй функциональный преобразователь 13, третий сумматор 14, второе сигнум-реле 15, четвер- тый сумматор 16, трехпоэиционное рел 17, усилитель 18. Ниже рассмотрены фунции, выполняемые отдельными структурными элементами. Первый измеритель рассогла.сования 1 формирует сигнал ошибки. Дифференциатор 9 вычисляет скорость изменения выходной координаты объекта управления 8. На основе этой информации усилители 2-8, второйизмеритеЛь 3 рассогласования и первый блок 4 ограничения формируют алгоритм линейного управления. Алгоритм релейного управления формируется функциональными преобразователями 10 и 13, сумматорами 11, 14, 16, дву мя сигнум-реле 12 и 15 и трехпозиционным реле 17. Функциональные преоб;разователи( выполняются по диодной схеме с суммированием оков на операционном усилителе (фиг. 2). Один спе рационный усилитель использован дпя инвертирования входного сигнала В схеме использованы операционные усилители К1УТ401Б и геръ|аниевые диоцы ГД507А. ПРИНЦИП действия схеюл основан на кусочно-линейной аппроксимации задан ной зависимости и представлении ее в виде суммы слагаемых, каждое из которых реализуется отдельной диодно ячейкой. Каяодая диодная ячейка реализует одну кусочно-линейную функцию. Структурные элементы 10 Ни 13, 14 гройзвЪдят вычисление двух нелинейвдх функций от ошибки и скорости изменения выходной координаты, а сиг,нум-реле 12 и 15 определяют их знак. Сумматор 16 и трехпозиционное реJE 17, в зависимости от соотношения знаков вычисленных функций, подают на второй вход сумматора 5 сигнал постоянный положительной или отрицательной полярности либо равный нулю. Сумматор 5 вместе со вторым блоком 6 ограничения объединяют сигналы, поступающие с контуров релейного линейного управления, и формируют на входе испэлнительного механизма 7 управляющее воздействие требуемой величины и знака. Исполни.тельный механизм 7 воздействует на объект управления 8 и соответствувадим образом изменяет его состояние. Измерители рассогласования 1 и 3, усилители 2 и 8, сумматоры 5, 11, 14, 16, функциональные преобразователи 10 и 13, реле 12, 15 и 17 и блоки ограничения 4 и б могут быть выполнены на серийно выпускаемых интегральных микросхемах (операционных усилителях, компараторах и т.д.). В качестве дифференциатора 9 может Олть использован тахогенератор. Исполнительный механизм 7 - электрический или электрогидравлический, в зависимости от типа управляемого объекта. Система реализует релейно-линейный .алгоритм управления следующего вида U к sc.(sal(CE + С sgn (Е Г(ч|)) t ; MsgnlE+F-())), где и сигнал на входе исполнительного привода 7; Е - ошибка; - скорость изменения выходной координаты объекта 8; некоторое число; Р) - характеристики функциональных преобразователей 10 и 13, причем F(v)) i с , с коэффициенты передачи усилителей 2 и 18. Система работает следующим образом. В исходном СОСТОЯНИЙ выходная координата объекта управления 8 равна сигналу на первом входе первого элемента сравнения 1, а ошибка и скорость изменения выходной координаты, формируемые; соответственно измеритеJEM рассогласования 1 и дифференциатором 9, равны нулю. Поэтому на входа, четвертого сумматора 16 поступают разнополярные сигналы и трехпбзи- инонное реле 17 находится всреднём
(нулевом) состоянии. Стабилизация .исходного состояния осуществляется засчет контуров линейного управления по положению скорости. При этом, управляющее воздействие, равное линейной комбинации ошибки и скороети,. формируется первым и вторым измерителем рассогласования 1 и 3, усилителями 2 и 18, блоками ограничения 4 и 6, сумматором 5.и дифференциатором 9. Коэфициенты линейного управления выбираются так, чтобы обеспечить устойчивость замкнутой системы.
При скачкообразном изменении значения входного воздействия ошибка системы становится отличной от нуля. Поэтому первый блок 4 ограничения переходит в режим насыщения и на первый вход второго сумматора 5 поступает постоянный сигнал, совпадающий по знаку с ошибкой. Сигнал ошибки через сумматоры 11 и 14 поступают также на сигнум-реле 12 и 15. Поэтом на входы сумматора 16 поступают однополярные сигналы и трехпозиционное реле 17 подключает ко второму входу второго сумматора 5 постоянное напряжение, совпадающее по знаку с ошибко В результате выходная величина второго сумматора 5 оказывается достаточной для того, чтобы перевести в насы щение второй блок 6 ограничения, и на исполнительный привод 7 подается управляющее воздействие постоянной амплитуды, соответствующее перйому интервалу релейного управления.
По мере отработки заданного рассогласования ошибка уменьшается, а скорость изменения выходной координаты увеличивается. Поэтому наступает момент, когда входная величина блока ограничения 4 изменяется настолько, что он работает на линейном участке статической характеристики. Одна- , ко изменение управляющего воздействия поступающего на исполнительный привод 7, не происходит, так как полка трехпозиционного реле 17 выбирается по крайней мере в два раза больше, чем максимальный сигнал блока ограничения 4. В результате к концу первого интервала релейного управления элемент 4 вновь входит в насыщение,.но уже по другой ветви статической характеристики.
Смена знака релейного управления происходит тогда, когда меняет знак один из сигналов,. форми;руемых функциональнь1ми преобразователями 10 и 13, сумматорами 11 и 14 и сигнум-реле 12 и 15. При этом трехпозиционное реле 17 переключается в среднее состояние, сигнал на втором входе второго сумматора 5 становится равным нулю . и элемент б переходит в тот же режим что и элемент 4. Поэтому на вход исполнительного привода 7 поступает
постоянное управляющее воздействие другого знака, соответствутацее второму интервалу релейного управления. Перевод системы с релейного управления на линейное происходит в момент, Когда выходят из насыщения элементы 4 и 6. Дальнейшая доводка объекта 8 до заданного состояния осуществляется линейным управлением.
Характеристики функциональных прег образователей 10 и 13 выбираются таким образом, чтобы линия переключений релейного управления совпадали с фазовыми траекториями, происходящими через заранее выбранные точки второго и четвертого координатных углов плоскости ошибки и ее производной. Эти точки, в свою очередь, выбираются так чтобы заключительный участок переходг ного процесса, соответствующий линейному управлению, отвечал заданным Iтребованиям качества. Поэтому переходный процесс в предложенной системе состоит из двух участков, первый из которых (релейный) соответствует оптимальному по быстродействию движения в заданную точку фазовой плоскости, а второй (линейный) - гладкому затуханию процесса в окрестности положения равновесия.
Применение данной системы в станг ках с программным управлением, приводах роботов-манипуляторов и т.д. позволяет повысить их производительность и-ул чшить качество выпускаемой продукции (за счет- более точного соблюдения технологических режимов). Система отличается простотой настройки, надежностью работы и обеспечивает устойчивость заданного состояния объекта.Применение ее для управле-. ния движением координатного стола фотолитографической установки позволяет, довести точность позиционирования до долей мкм.Формула изобретения
Следящая система, содержащая исполнительный механизм, подключенный к объекту, выход которого соединён с вторым входом первого измерителя рассогласования, а через последовательно соединенные дифференциатор, функциональный преобразователь,, первый су1-1матор - с входом первого/ сигнум-реле, второй вход первого сум матора соединен с выходом первого измерителя рассогласования, о..т л и чающаяся тем, что, с целью повышенияточности системы/ в нее введены первый усилитель, последовательно соединённые второй усилитель, второй измеритель рассогласования, первый блок ограничения, второй сум матор и второй блок ограничения, а также последовательно соединенные.
«торой функциональный преобразователь третий сумматор, второе сигнум-реле., четвертый сумматор и трехпозиционное реле, выход которого подключен к второму входу второго сумматора, вход второго функционального преобразователя соединен с выходом дифференциатора , а через первый усилитель - с вторым входом второго измерителя рассогласования; второй вход третьего суАматора соединен с выходом первого измерителя рассогласования и входом второго усилителя, а .выход второго блока ограничения соединен с входом
жполнитёльного механизма, причем выход первого сигнум-реле соединен с вторым входом четвертого сумматора.
Источники информации, финятые во внимание при экспертизе 1. Синтез позиционных систем программного управления. Под ред. А.Вавилова. Л., Мсшшностроение., 1977, с. 183.
2. Павлов А.А. Синтез релейных систем, оптимальных по быстродействию М., Наука, 1966, с. 98-102 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
О
о
f
