Изобретение относится к автоматическим импульсным регуляторам, в которых выходной сигнал является лре- рывной функцией отклонения входного сигнала от заданной величины, и может быть использовано в системах автоматического регулирования различных процессов в теплоэнергетике и химии при применении в качестве исполнительных устройств механизмов с постоянной скоростью перемещения для объектов с малой инерционностью, например в установках для регулировани температуры путем изменения концентрации компонентов смеси из двух компонентов с различной температурой.
Целью изобретения является повышение точности и быстродействия регулятора .
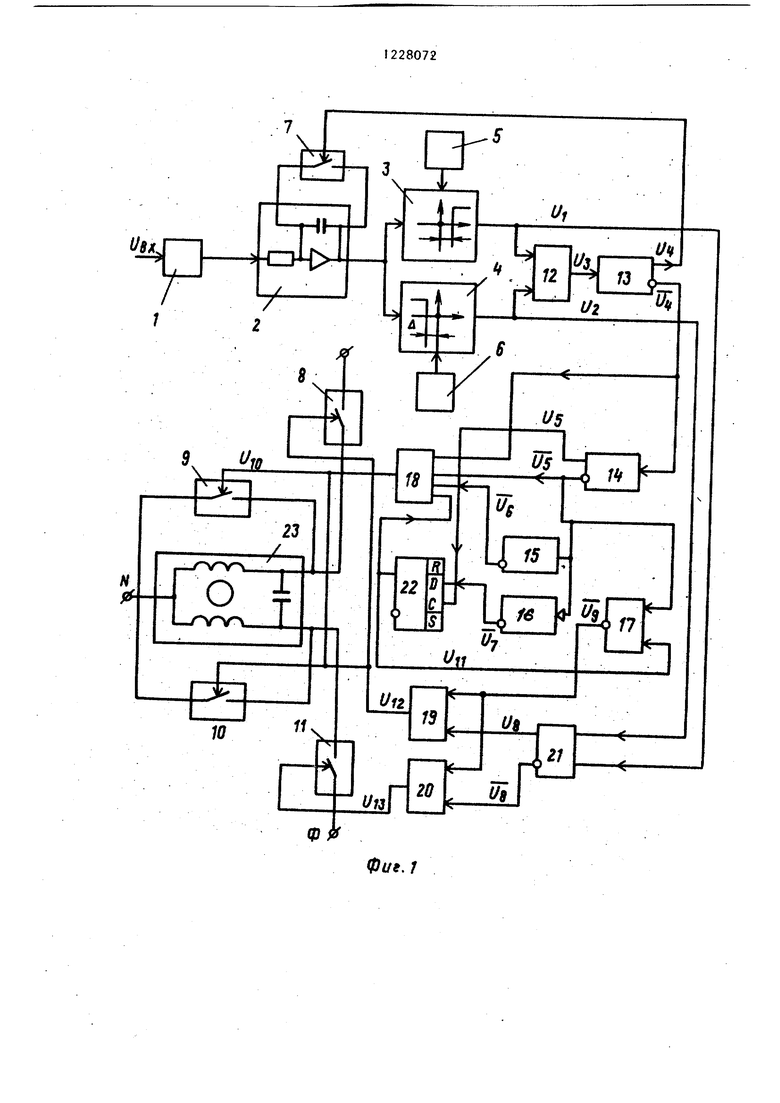
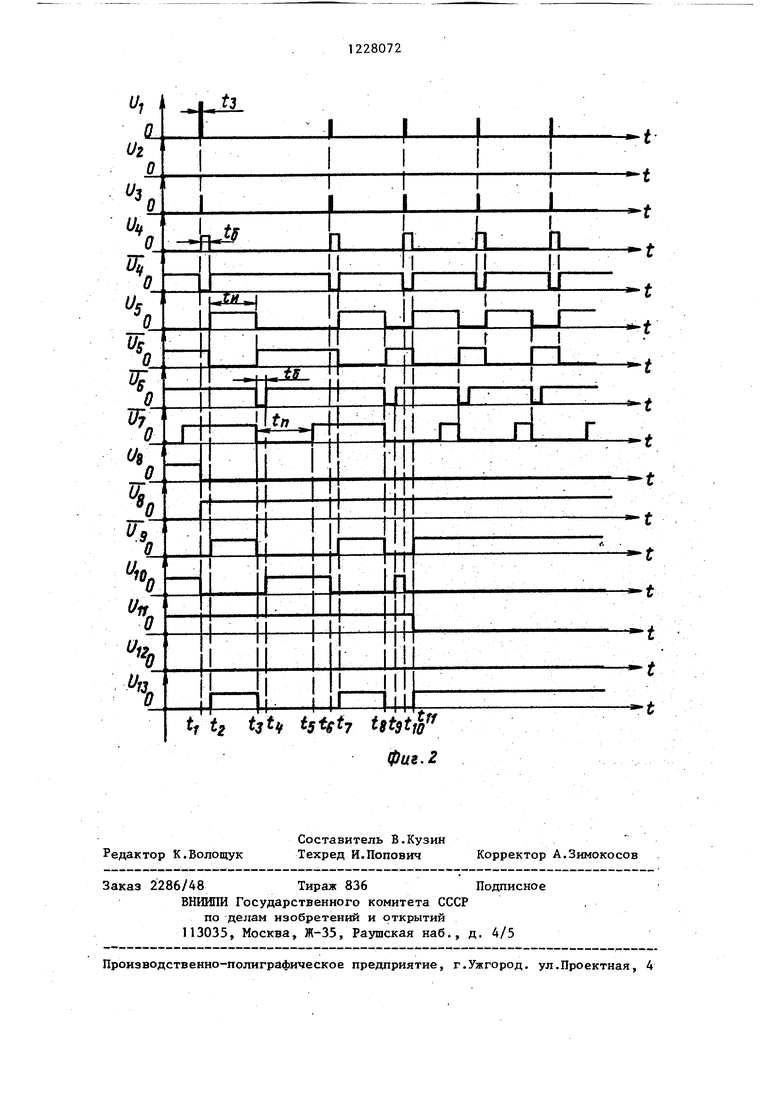
На фиг.1 представлена функциональная схема регулятора; на фиг.2 - временные диаграммы основных сигналов регулятора при отработке возмущающего или управляющего воздействия.
Регулятор (фиг.1) содержит усилитель 1, интегратор 2, несимметричные релейные элементы 3 и 4, задатчи ки зоны нечувствительности 5 и 6, ключевые элементы 7 - 11, элемент ШШ 12, одновибраторы 13-16, элемент И-НЕ 17, элементы И 18-20, RS- триггер 21, D-триггер 22. В процессе регулирования регулятор осуществляет управление исполнительным устройством с постоянной скоростью перемещения .
Работа регулятора осуществляется следующим образом.
На вход регулятора поступает сигнал Ugjj i равный разности между заданным и действительным значениями регулируемого параметра, и усиленный усилителем 1 он поступает на вход интегратора 2. С выхода интегратора 2 сигнал поступает на входы несимметричных релейных элементов 3 и 4. В зависимости от полярности сигнала рассогласования при достижении сигналом на выходе интегратора 2 уровня, заданного задатчиком зоны нечувствительности 5 или 6, сра- батьшает соответствующий несимметричный релейный элемент, например элемент 3, На выходе элемента 3 возникает сигнал и, (момент , времени t на фиг.2) и поступает на один из входов элемента ИЛИ 12, вызывая появление на выходе последнего
5
0
5
сигнала Uj, которым запускается одновибратор 13. Одновременно сигнал и с выхода несимметричного релейного элемента 3 поступает на один из входов RS-триггера 21, вызывая, при необходимости, его переключение. При переключении триггера 21 инвертируются сигналы Ua и Uo на его выхоо а
дах, поступающие на входы элементов И 19 и 20 и подготавливающие включение обмотки исполнительного устройства, соответствующей полярности сигнала рассогласования Ug .
Запуск одновибраторов 13-16 осуществляется по переднему фронту входного сигнала. При запуске сигналом V одновибратора 13 на выходах его на время импульса t происходит ин-- вертирование сигналов. Сигнал Uj, единичного значения поступает на управляющий вход ключевого элемента 7, а сигнал и с .инверсного выхода одно- вибратора I3, Поступающий на вход одновибратора 14, принимает нулевое значение. При срабатывании ключевого элемента 7 происходит обнуление интегратора 2 и, соответственно, уменьшение до нуля сигналов U и Uj. Поскольку в исходном состоянии т.е. до момента запуска одновибратора 13, сигналы и , Ug , и, U имеют единичные значения, то при запуске одновибратора 13 сигнал на выходе элемента И 18 становится равным О, что 5 вызывает отключение ключевых элементов 9 и 10 и подготовку к включению : исполнительного устройства 23. Длительность импульса tg принимается минимально возможной, но достаточной для срабатывания последующих устройств . Если в качестве ключевых элементов 8 - 11 используются устройства тиристорного типа, отключение которых происходит не в момент равенства О управляющего сигнала, а при выполнении одновременного условия равенства О тока через тиристор, длительность импульса tg выбирается не менее, чем Т/2, где Т - период напряжения питания электродвигателя исполнительного устройства. Тем самым обеспечивается нормальное функционирование схемы и исключение возможности короткого замыкания при переключении
0
0
5
0
5
ключевых элементов.
В момент окончания импульса дли тельностью tj происходит обратное
инвертирование сигналов U и Оц на выходах одновибратора 13. При этом происходит запуск одновибратора 14, дпительность импульсов на выходе которого t определяет длительность . управляющего импульса, поступающего на обмотки исполнительного устройства (момент времени t,., на фиг, 2). Сигнал Uj на прямом выходе одновибратора 14 прпнимает единичное значение, а сигнал Vg на его инверсном выходе - нулевое. Равенство О сигнала U обеспечивает возможность включения ключевых элементов 9 и 10 в течение управляющего импульса и, одновременно, вызывает появление единичного уровня напряжения сигнала Од на выходе элемента И-НЕ 17. На выходе элемента И 20 появляется сигнал , поступающий на управляющий.вход ключевого элемента 11. -При включении ключевого элемента 11 осуществляется подключение одной из обмоток электродвигателя исполнительного механизма к напряжению питания и перемещение испол нительного устройства в течение времени t в сторону, обеспечивающую уменьшение сигнала рассогласования. В момент окончания управляющего импульса длительностью t происходит
п
обратное инвертирование сигналов на выходах одновибратора 14. При этом становится равным О сиганал Ug на выходе элемента И-НЕ 17, что вызывает, соответственно, отключение ключевого элемента 11.
Одновременно происходит запуск од новибраторов 15 и 16 (момент времени t,j на фиг.2). Дпительность импульса на выходе одновибратора 15 равна t, что обеспечивает невозможность включения ключевых элементов 9 и 10 до гарантированного отключения ключевых элементов 8 и 1 1 . Длительность импульса на выходе одновибратора 16 tp определяет допустимую длительност паузы между очередными импульсами управления. По истечении времени tg (момент времени t на фиг.2) происходит обратное, инвертирование сиг- нала и на выходе одновибратора 15, на выходе элемента И 18 формируется единичное значение сигнала U и включение ключевых элементов и 10. При этом обеспечивается зако- рачивание обмоток исполнительного устройства 23 и улучшение качественных характеристик системы регулиро -tO
9
вания с использованием регулятора. В момент времени t заканчиваете переключение элементов схемы регулятора, которые устанавливаются в исходное состояние. Если на входе регулятора продолжает действовать, сигнал рассогласования U той же полярности и интервал времени между передними фронтами импульсов на выходе несимметричного релейного элемента 3 не меньше, чем (,+t), работа элементов регулятора повторяется в описанной последовательности и на выходе регулятора формируется последовательность импульсов управления, частота которых линейно зависит от величины сигналй рассогласования Ug .
Наличие одновибратора 16 обеспечивает перевод регулятора в релейный режим работы при превьппении сигналом рассогласования некоторого значения, при котором включение одновибратора 14 происходит в момент наличия импульса на выходе одновибратора 16. Проверка состояния D-триг гера 22 осуществляется сигналом Ut по его переднему фронту. Если длительность импульса на выходе одновибратора 16 такова, что его инвертирование в момент окончания импульса (момент времени t. на фиг.2) происходит до запуска одновибратора 14, переключения D-триггера не происходит и работа схемы прл очередном формировании импульса управления происходит аналогично описанному (моменты
- 0 45 ь so55
времени t.
t7, t,
t.« ) . Если
(, и 9 срабатывание одновибратора 14 происходит в момент времени, когда сигнал и, на выходе одновибратора 16 имеет нулевое значение, т.е. когда одно- вибратор 16 запущен (момент времени t на фиг.2), происходит переключение D-триггера, на выходе элемента И-НЕ 17 формируется единичное значение сигнала U и регулятор входит в релейный режим работы до тех пор, пока сигнал рассогласования не уменьшится до заданного настройкой одновибратора 16 значения.
Для обеспечения стабильной работы регулятора в релейном режиме при любых величинах сигнала рассогласования в качестве одновибратора 16 целесообразно применять одновиб- раторы с повторным запуском, например типа КМ155АГЗ, запуск которых
осуществляется независимо от того, в каком состоянии находится одновиб- ратор. При использовании одновибра- торов обычного типа, повторный запуск которых происходит только по окончании предыдущего импульса, например К155АГ1, при определенной величине сигнала рассогласования возможен сбой релейного режима, так как перед- НИИ фронт сигнала U с выхода одно- вибратора 14 может оказаться сформированным в момент, когда одновибратор 16 не будет запущен несмотря на величину сигнала рассогласования, пре- вышающую предельное значение.
Таким образом, при малых значениях сигнала рассогласования Uj регулятор осуществляет интегральную частотно-импульсную модуляцию управ- ляющего сигнала, а при больших значениях -. релейное управление, что обеспечивает повышенное быстродействие систем регулирования при применении предложенной конструкции регулятора. Наличие ключевых элементов 9 и Ю и закорачивание обмоток исполнительного устройства 23 при снятии управляющего импульса ведет к повьшению точ- иости отработки в установившемся ре- жиме.
Формула изобретения
Импульсно-релейный регулятор, содержащий четыре одновйбратора, RS- триггер, первый несимметричный релейный элемент, подключенный управляющим входом к выходу первого задат- чика, последовательно соединенные усилитель, интегратор, второй несимметричный релейный элемент, подключенный управляющим входом к выходу второго задатчика, и элемент ИЛИ, соединенный выходом с входом первого одновйбратора, прямой выход которого подключен к управляющему входу первого ключевого элемента, включенного параллельно конденсатору интегратора , выход интегратора через первый несимметричный релейный элемент подключен к второму входу элемента ИЛИ, отличающийся тем, что, с целью повышения точности и быстродействия , регулятор содержит D-триг- гер, второй, третий, четвертый и пятый ключевые элементы, три элемента И и элемент И-НЕ, инверсный выход первого одновйбратора соединен с входом второго одновйбратора и с первым входом первого элемента И, выходы первого и второго несимметричных релейных элементов соединены соответствен но с первым и вторым входами RS-триг гера, прямой выход которого соединен с первым входом второго элемента И, а инверсный - с первым входом третьего элемента. И, прямой выход второго одновибрйтора соединен с тактовым входом D-триггера, а инверсный - с вторым входом первого элемента И, с входами третьего и четвертого од- новибраторов и с первым входом элемента И-НЕ, выход которого соединен с вторыми входами второго и третьего элементов И, выходы которых соединены соответственно с управляющими входами второго и третьего ключевых элементов, включенных последовательно с соответствующими обмоткамк исполнительного устройства, инверсные выходы третьего и четвертого одновиб- раторов соединены соответственно с третьим входом первого элемента И и с информационным входом D-триггера выход которого соединен с четвертым входом первого элемента И и с вторым входом элемента И-НЕ, выход первого элемента И соединен с управляющими входами четвертого и пятого ключевых элементов, включенных параллельно обмоткам исполнительного устройства.
Фи9.1
Редактор К.Волощук
Составитель В.Кузин Техред И.Попович
Заказ 2286/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор А.Зимокосов

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1339491A1 |
| Частотно-импульсный регулятор | 1983 |
|
SU1096608A1 |
| Частотно-импульсный регулятор | 1987 |
|
SU1444709A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
Изобретение относится к области систем управления. Целью изобретения является повышение точности и быстродействия регулятора. Поставленная цель достигается тем, что в регуля- . тор, содержащий четыре одновибратора, RS-триггер, первый и второй несш4мёт- ричные релейные элементы, усилитель, интегратор, два задатчика, элемент ИЛИ, введены D-триггер, второй, гре- тий, четвертый и пятый ключевые элементы, три элемента И и элемент И-НЕ. 2 ил.
| Нелинейные системы автоматического управления | |||
| Метод гармонкчес- кой линеаризации в проектировании нелинейных систем автоматического управления | |||
| /Под ред | |||
| Ю.И.Топчеева | |||
| М.: Машиностроение, I970, с | |||
| Частотно-импульсный регулятор | 1983 |
|
SU1096608A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
