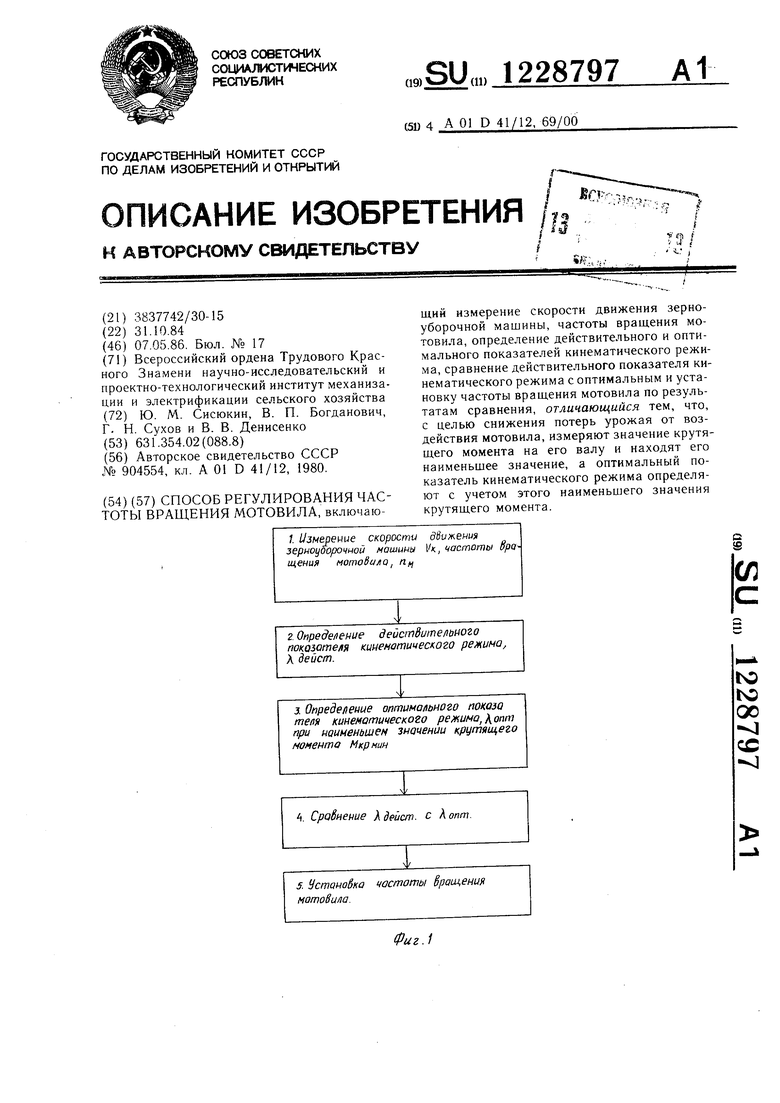
Изобретение относится к области сельского хозяйства, в частности к способам регулирования частоты вращения мотовила жа ток и подборщиков уборочных машин.
Цель изобретения - снижение потерь урожая от воздействия мотовила.
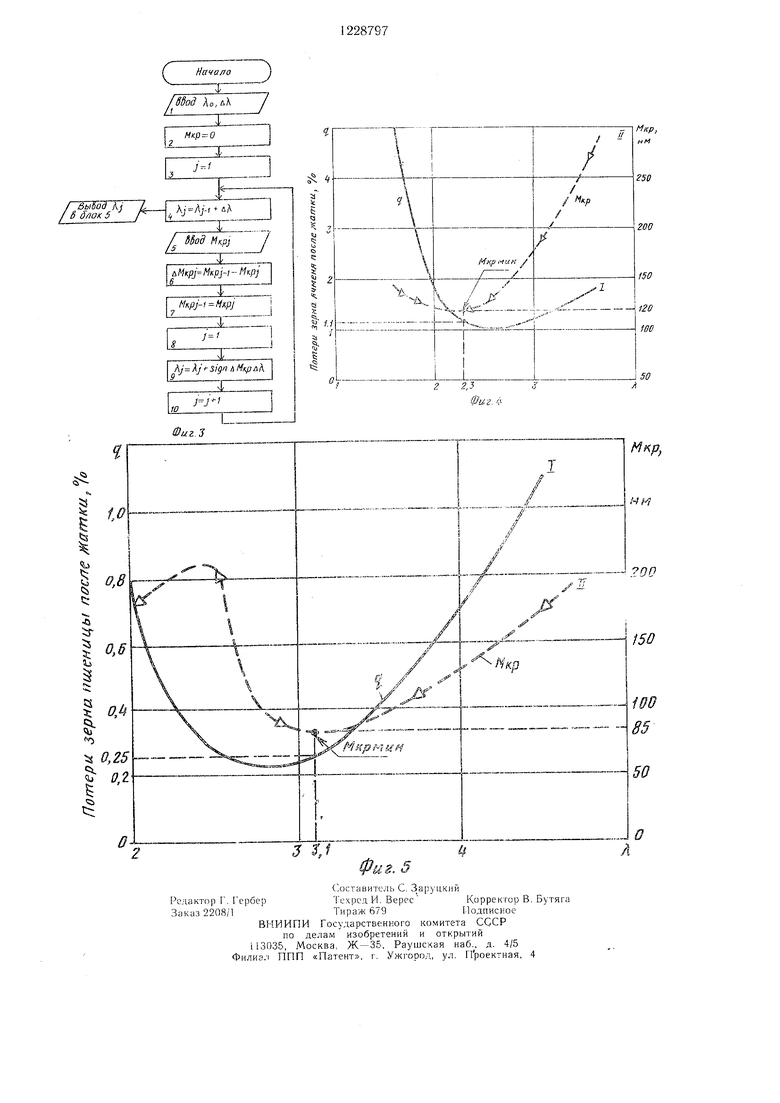
На фиг. 1 изображена схема последовательности операций при регулировании частоты вращения мотовила по данному способу; на фиг. 2 - блок-схема устройства, реализующего данный способ; на фиг. 3 - алгоритм работы устройства; на фиг. 4 и 5 - графики, отражающие зависимость потерь зерна {кривая 1) и крутящего момента (кривая II) от показателя кинематического режима при уборке ячменя и пще- ницы соответственно.
Работа по данному способу осуществляется слей,ующим образом.
В процессе уборки зерновых культур производят фиг. 1 измерение скорости движения VK уборочной машины и частоты вра- щения пм мотовила (1). По найденным значениям VK и Пт определяют действительное значение показателя кинематического режима (действие 2) Хдейст. -г-;, где VM -уллинейная скорость планок мотовила.
Оптимальное значение показателя тического режима Кот находят по наименьшему значению крутящего момента на валу мотовила Мкрт,-„ (3) (фиг. 4 и 5).
При этом оптимальная частота вращения мотовила Пм. опт. является функцией от VK и Мкр, т.е.
Пат. f() при Мкр -- min.
Сравнение Хдейст. с А,о,.т. (4) позволяет определять необходимость в изменении частоты
Значение Пк,- поступает в блок 6, где оно сравнивается со значением частоты вращения мотовила Ъ: дсйст., измеряемым датчиком 3. Сигнал рассогласования из блока 6 поступает к исполнительному механизму 7, который устанавливает частоту вращения мотовила Пи,.
Одновременно, после начала движения 2 комбайна, измеряется крутящий момент Мкр датчикорл 1, сигнал от которого поступает также в блох 4. Как видно на фиг. 4 и 5 каждому значению Х; будет соответствовать разност1 значений крутяпдего момента
ДМкр/ Мкр;.., Мкр,-.
30 По мере роста л/ значения Мкр будут уменьи.1аться, а знак ДМкру будет сохраняться неизменным. По достижении определенного значения Х; значения Мкр станут возрастать (фиг. 4 и 5) и, следовательно, ДМкр,- поменяет знак. В алгоритм р.аботы блока 4 заловращения мотовила. Значения-Яолтдолжны 5 жена смена знака величины (фиг. 3). Поэнаходиться в пределах иЛояг, что ограничивает области поиска значений п,,о„
Устройство фиг. 2 содержит датчик 1 измерения крутящего момента Мкр на валу мотовила, датчик 2 измерения скорости движения VK комбайна и датчик 3 измерения частоты вращения Пм мотовила. Датчик 1 соединен с входом блока 4 определения текущих значений показателя кинематического режима, выход которого соединен с первым входом блока 5 определения текущего значения частоты вращения мотовила, при этом второй его вход соединен с выходом датчика 2 измерения скорости диже- ния комбайна, а выход - с первым вхо40
45
тому цикл определения повторяется.
Значение л,-, соответствующее моменту изменения знака ДМкр, является оптимальным значением показателя кинематического режима Лопт.. Установленное по Кот. значение частоты вращения мотовила также является
ЛМОНТ..
в дальнейшем устройство постоянно корректирует значение Лот. согласно условиям уборки и поддерживает таким образом Пк опт.
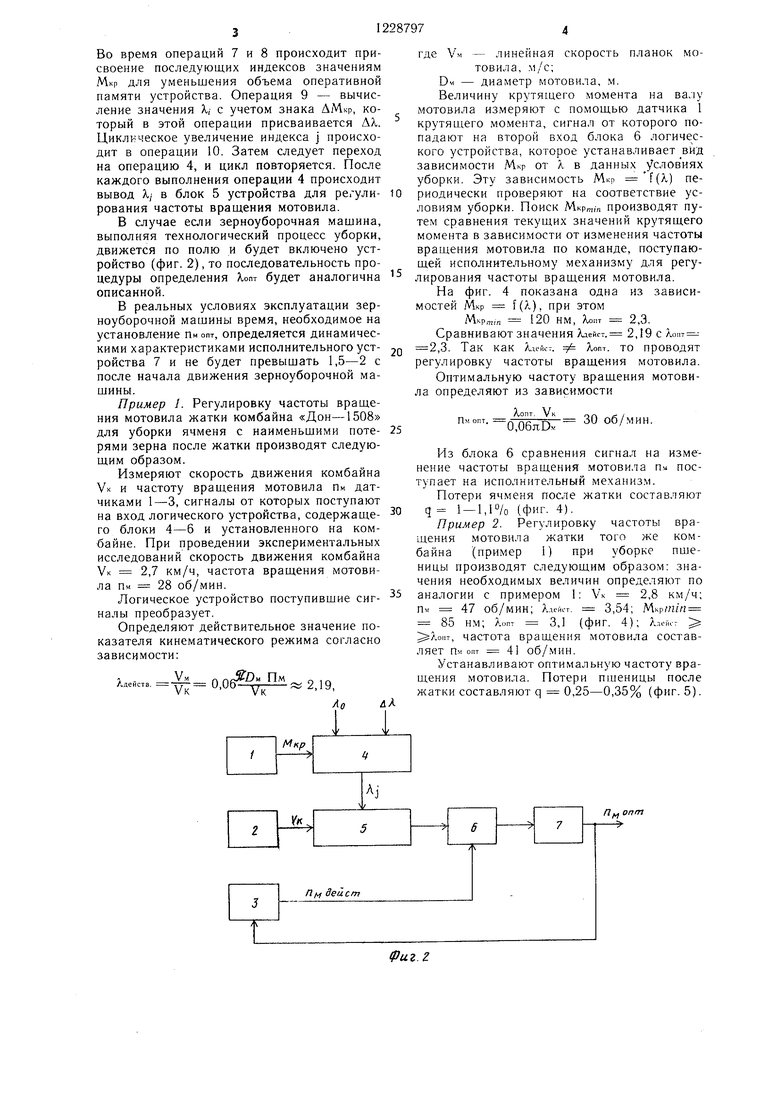
На фиг. 3 показана блок-схема алгоритма работы блока 2 устройства (фиг. 2), который включает в себя следуюш.ие вычислительные операции. Операция 1 - ввод значений Яо и А,. Затем производится задание начального значения крутящего момента
дом блока 6 сравнения, второй вход которо- 50 Мкз равное нулю (2). Операция 3 предназ3
го соединен с выходом датчика 3 частоты вращения мотовила, причем выход блока 6 сравнения посредством исполнительного механизма 7 связан с датчиком 3 частоты вращения мотовила.
Устройство работает следующим образом. 5 В блок 4 введены начальное значение Я,о показателя кинематического режима и значение его дискретного изменения, которое
начена для организации цикла вычислении. Операции 4-10 составляют цикл определения значения Х/. На первом этапе цикла (операция 4) вычисляется л, путем суммирования предыдущего значения Kj- с (например, К ). Операция 5 - ввод измеренных текущих значений крутящего момента ДМкр. Приращение крутящего момента ДМкр определяется при операции 6.
зазисит от допустимой ошибки регулирования частоты вращения мотовила. Значение Ко выбирается в интервале 1 - l,i.
В момент начала движения зерноуборочной мащины Мкр : О, Хдсйст. 1о и п«
-,-L. В блоке 4 сразу после начала двиjcDn
жения зерноуборочной машины производится определение текущих значений v, с шагом ДА, (алгоритм работы блока 4 представлен на фиг. 3), т.е ./ Х./-1 -f -|- АХ. Рчзждое значение А,, поступает в блок 5. Скорость двклсений комбайна измеряется датчиком 2, сигнал от которого поступает в блок 5. На основе значений Ki и VK определяется текущее значение частоты, вращеVKA,,кия мотовила по зависимости Пм/
J D.
Значение Пк,- поступает в блок 6, где оно сравнивается со значением частоты вращения мотовила Ъ: дсйст., измеряемым датчиком 3. Сигнал рассогласования из блока 6 поступает к исполнительному механизму 7, который устанавливает частоту вращения мотовила Пи,.
Одновременно, после начала движения комбайна, измеряется крутящий момент Мкр датчикорл 1, сигнал от которого поступает также в блох 4. Как видно на фиг. 4 и 5 каждому значению Х; будет соответствовать разност1 значений крутяпдего момента
ДМкр/ Мкр;.., Мкр,-.
По мере роста л/ значения Мкр будут уменьи.1аться, а знак ДМкру будет сохраняться неизменным. По достижении определенного значения Х; значения Мкр станут возрастать (фиг. 4 и 5) и, следовательно, ДМкр,- поменяет знак. В алгоритм р.аботы блока 4 заложена смена знака величины (фиг. 3). Поэ
тому цикл определения повторяется.
Значение л,-, соответствующее моменту изменения знака ДМкр, является оптимальным значением показателя кинематического режима Лопт.. Установленное по Кот. значение частоты вращения мотовила также является
ЛМОНТ..
в дальнейшем устройство постоянно корректирует значение Лот. согласно условиям уборки и поддерживает таким образом Пк опт.
На фиг. 3 показана блок-схема алгоритма работы блока 2 устройства (фиг. 2), который включает в себя следуюш.ие вычислительные операции. Операция 1 - ввод значений Яо и А,. Затем производится задание начального значения крутящего момента
Мкз равное нулю (2). Операция 3 предназначена для организации цикла вычислении. Операции 4-10 составляют цикл определения значения Х/. На первом этапе цикла (операция 4) вычисляется л, путем суммирования предыдущего значения Kj- с (например, К ). Операция 5 - ввод измеренных текущих значений крутящего момента ДМкр. Приращение крутящего момента ДМкр определяется при операции 6.
Во время операций 7 и 8 происходит присвоение последующих индексов значениям Мкр для уменьшения объема оперативной памяти устройства. Операция 9 - вычисление значения X/ с учетом знака ДМкр, который в этой операции присваивается &.К. Циклическое увеличение индекса j происходит в операции 10. Затем следует переход на операцию 4, и цикл повторяется. После каждого выполнения операции 4 происходит
где VM - линейная скорость планок мотовила, .м/с;
DM - диаметр мотовила, .м.
Величину крутящего момента на валу мотовила измеряют с помощью датчика 1 крутящего момента, сигнал от которого попадают на второй вход блока 6 логического устройства, которое устанавливает вид зависимости Мкр от л в данных УСЛОВ ИЯХ уборки. Эту зависимость Мкр (,) пеловиям уборки. Поиск Мкр„„-„ производят путем сравнения текущих значений крутящего момента в зависимости от изменения частоты вращения мотовила по команде, поступающей исполнительному механизму для регувывод Kj в блок 5 устройства для регули-10 риодически проверяют на соответствие ус- рования частоты вращения мотовила.
В случае если зерноуборочная мащина, выполняя технологический процесс уборки, движется по полю и будет включено устройство (фиг. 2), то последовательность про- ,...
цедуры определения Х,опт будет аналогична лирования частоты вращения мотовила описанной.На фиг. 4 показана одна из зависиВ реальных условиях эксплуатации зер-мостей Мкр f(.). при этом
ноуборочной мащины время, необходимое наМкр,.„,„ 120 нм, U.T 2,3.
установление пм опт, определяется динамичес-Сравнивают значения Я.гейст. 2, l9 с ло„т -кими характеристиками исполнительного уст-JQ 2,3. Так как /.гсйс.. Х,. то проводят ройства 7 и не будет превыщать 1,5-2 с регулировку частоты вращения мотовила после начала движения зерноуборочной ма-Оптимальную частоту вращения мотовищины.
ла определяют из зависимости
Пример 1. Регулировку частоты вращения мотовила жатки комбайна «Дон-1508 для уборки ячменя с наименьщими поте- рями зерна после жатки производят следующим образом.
Измеряют скорость движения комбайна VK и частоту вращения мотовила Пи датчиками 1-3, сигналы от которых поступают на вход логического устройства, содержаще- го блоки 4-6 и установленного на комбайне. При проведении экспериментальных исследований скорость движения комбайна VK 2,7 км/ч, частота вращения мотовила пм 28 об/мин.
Логическое устройство поступившие сиг- налы преобразует.
Определяют действительное значение показателя кинематического режима согласно зависимости:
о,
VK
VK
2,19,
где VM - линейная скорость планок мотовила, .м/с;
DM - диаметр мотовила, .м.
Величину крутящего момента на валу мотовила измеряют с помощью датчика 1 крутящего момента, сигнал от которого попадают на второй вход блока 6 логического устройства, которое устанавливает вид зависимости Мкр от л в данных УСЛОВ ИЯХ уборки. Эту зависимость Мкр (,) периодически проверяют на соответствие ус-
ловиям уборки. Поиск Мкр„„-„ производят путем сравнения текущих значений крутящего момента в зависимости от изменения частоты вращения мотовила по команде, поступающей исполнительному механизму для регуриодически проверяют на соответствие ус-
,...
ирования частоты вращения мотовила На фиг. 4 показана одна из зависиопределяют из зависимости
Лопт. VK
Пм опт.
0,06яО«
30 об/мин.
25 0
Л
Из блока 6 сравнения сигнал на изменение частоты вращения мотовила пм поступает на исполнительный механизм.
Потери ячменя после жатки составляют Ч 1 -1, (фиг. 4).
Пример 2. Регулировку частоты вращения мотовила жатки того же комбайна (пример 1) при уборке пшеницы производят следующим образом: значения необходимых величин определяют по аналогии с примером 1: VK 2,8 км/ч; п« 47 об/мин; Ьсйст. 3,54; Мкртш 85 нм; Лопт 3,1 (фиг. 4); Ядо.кт Лопт, частота вращения мотовила составляет Пм опт 41 Об/.МИН.
Устанавливают оптимальную частоту вращения мотовила. Потери пшеницы после жатки составляют q 0,25-0,35% (фиг. 5).
/7д, опт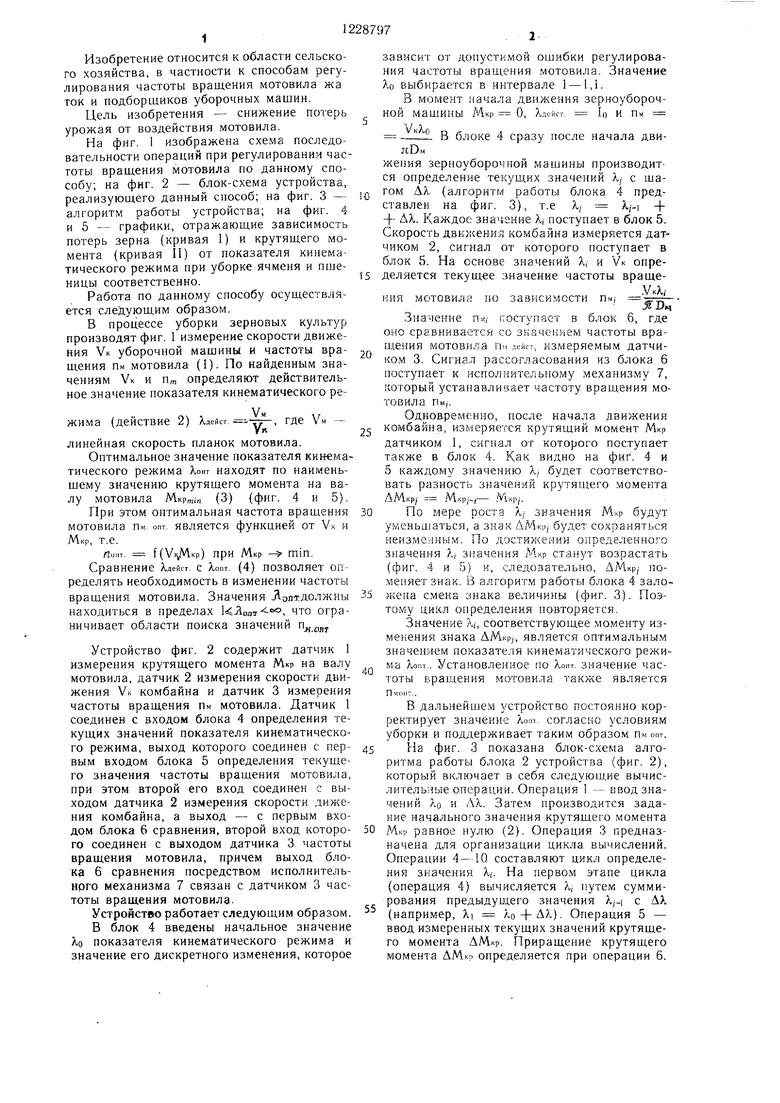
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ХЛЕБНОЙ МАССЫ В ЗЕРНОУБОРОЧНЫЙ КОМБАЙН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2229208C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| МОТОВИЛО | 2000 |
|
RU2179795C2 |
| Автоматический регулятор скорости вращения мотовила зерноуборочной машины | 1980 |
|
SU904554A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ РАБОТЫ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ | 2009 |
|
RU2400045C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2020 |
|
RU2816642C2 |
| Приспособление к жатке зерноуборочного комбайна | 2021 |
|
RU2795708C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
J -
Фиг. г
С
Начало
з:
/ЖЛо,йХ
i
MKf) 0
zi
/SS5I7-C5 J ° J
/- -. I f - -(
/Г
Лед
Д W/(pj-/ А/кр/ SI
A1-.
Mxpj-i-MKpJ
zzznn
1
jsXjfSign л Miiftui
j:
L
„.,.,.,:
...
iZO we
50
to
Фиг.З
МНР,
1-}
С.оставитель С. Заруцкий
Редактор Г. ГсрберТехред И, Верес Корректор В. Бутяга
Заказ 2208/1Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская иаб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. П роектная, 4
| Автоматический регулятор скорости вращения мотовила зерноуборочной машины | 1980 |
|
SU904554A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
