Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах, регулирующих загрузку рабочих органов зерноуборочного комбайна путем изменения скорости движения.
Известен способ регулирования подачи хлебной массы в зерноуборочный комбайн (SU 488540, A 01 D 41/12, 25.10.72), включающий определение подачи хлебной массы по толщине ее слоя, находящегося на транспортере наклонной камеры. Оптимальная толщина слоя или оптимальная подача, зависящая от состояния хлебной массы (ее влажности, засоренности иными растениями, густоты и др.), задается вручную. Толщина слоя контролируется соответствующим датчиком непрерывно. При уменьшении толщины слоя хлебной массы сигнал от датчика поступает к регулятору скорости комбайна на ее увеличение и наоборот.
Недостатком известного способа является то, что подачу хлебной массы, измеряемую в кг/с, определяют по одному параметру - толщине слоя на транспортере наклонной камеры. Толщина слоя характеризует равномерность распределения хлебной массы на транспортере и не позволяет учитывать ее состояние, а также потери зерна за комбайном. При этом возрастает ошибка в определении оптимальной подачи и, следовательно, увеличиваются потери зерна за зерноуборочным комбайном.
Известен способ регулирования подачи хлебной массы в зерноуборочный комбайн (SU 1058536, А 01 D 41/12, 07.12.83), включающий измерение крутящего момента на валу жатки, регулирование скорости движения комбайна и зазоров между молотильными барабаном и декой.
Однако значение крутящего момента на валу жатки соответствует только количеству срезанных растений, но не подаче хлебной массы, которая изменяется с высотой среза убираемой культуры.
Известна жатвенная часть зерноуборочного комбайна, состоящая из жатки, проставки и наклонной камеры (Песков Ю.А. Зерноуборочные комбайны “Дон” / Ю.А. Песков, И.К. Мещеряков и др. - М.: Агропромиздат, 1986 с.10-11, 25-27, 165, 169). Битер проставки, расположенный на входе в наклонную камеру, забирает хлебную массу от жатки и передает ее в наклонную камеру. Битер приводится цепной передачей от трансмиссионного вала жатки.
Результаты исследований (Обосновать энергозатраты рабочих органов и ходовой части зерноуборочного комбайна для оптимизации агротехнических показателей его функционирования. - Отчет о НИР, ВНИП-ТИМЭСХ, Зерноград, 1986, 39 с. - с.9-12) указывают на возможность использования битера проставки в качестве датчика, определяющего подачу хлебной массы по мощности, подводимой к его валу.
Недостатком известного устройства является невозможность определения мощности, подводимой к валу битера.
Для устранения отмеченных недостатков предлагается способ регулирования подачи хлебной массы в зерноуборочный комбайн, при осуществлении которого определяют мощность, подводимую к валу битера, расположенного на входе в наклонную камеру, и находят ее наименьшее значение, а скорость движения, соответствующую оптимальной подаче хлебной массы, задают с учетом этого наименьшего значения мощности. В устройстве для регулирования подачи хлебной массы в зерноуборочный комбайн вал битера снабжен датчиком частоты вращения и соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления, к насосу, оснащенному регулятором рабочего объема, причем датчики частоты вращения и давления подключены к первому и второму входам блока управления, а регулятор рабочего объема насоса соединен с первым выходом блока управления.
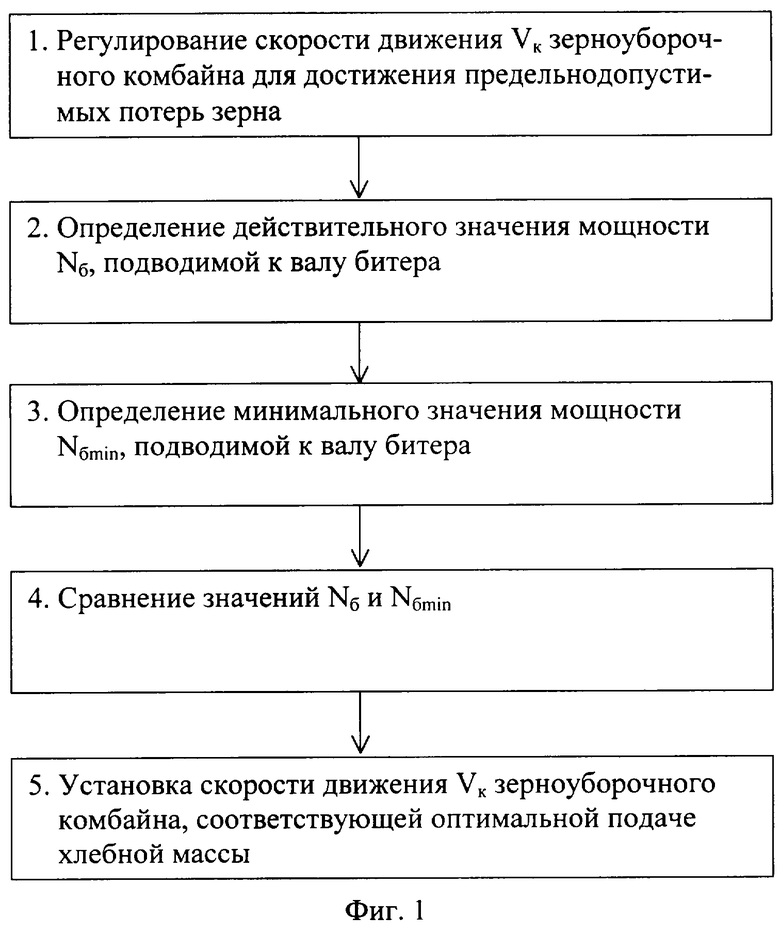
На фиг.1 представлена схема последовательности операций при регулировании подачи хлебной массы в зерноуборочный комбайн.
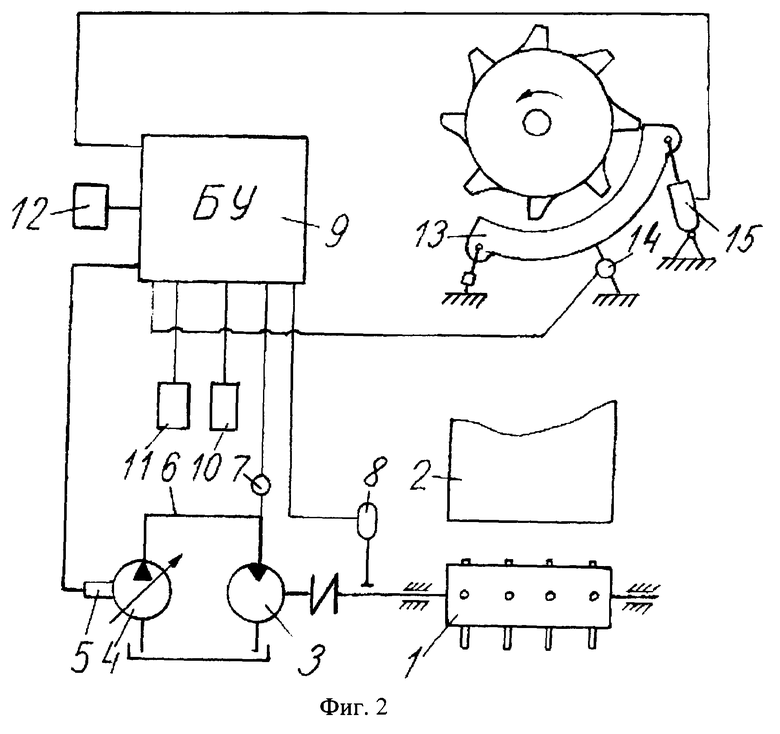
На фиг.2 представлены схема устройства для реализации способа регулирования подачи хлебной массы в зерноуборочный комбайн.
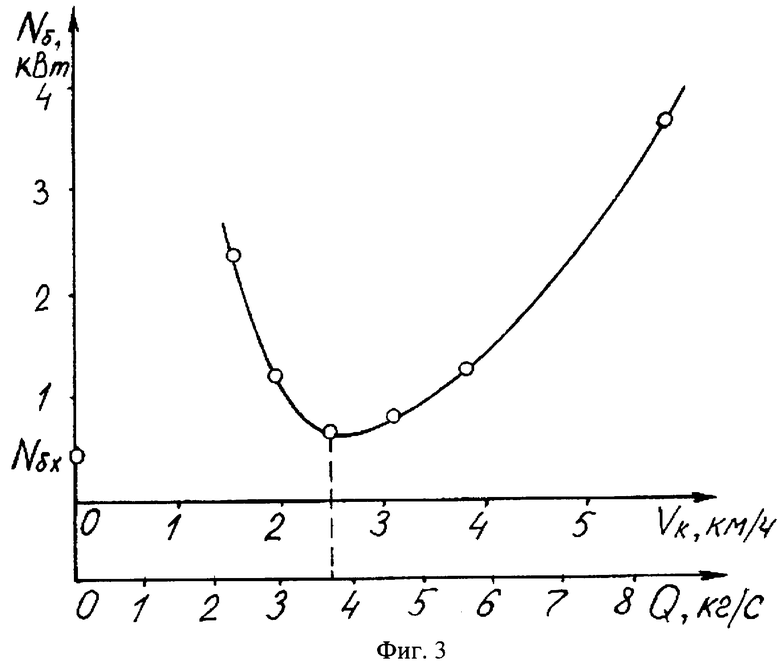
На фиг.3 изображен график зависимости подводимой мощности к валу битера от скорости движения комбайна при постоянной частоте вращения битера.
Регулирование подачи хлебной массы в зерноуборочный комбайн по предлагаемому способу осуществляется следующим образом.
В процессе уборки зерновых производят (фиг.1) регулирование скорости движения Vк зерноуборочного комбайна так, чтобы потери зерна за комбайном стали предельнодопустимые. Затем измеряют частоту вращения nб вала битера, расположенного на входе в наклонную камеру, и крутящий момент Mб на его валу. По найденным значением nб и Мб определяют действительное значение мощности Nб=2π МбПб, подводимой к валу битера.
Скорость движения Vк зерноуборочного комбайна, соответствующую оптимальной подаче хлебной массы, устанавливают по наименьшему значению мощности Nб min, подводимой к валу битера. Значение Nб min определяют путем изменения частоты вращения nб вала битера с заданным дискретным изменением Δ nб. При этом оптимальная подача хлебной массы QОПТ является функцией от Vk и Nб, т.е. QОПТ=f(Vk, Nб) при Nб → min.
Сравнивают действительное значение мощности Nб с Nб min и определяют необходимость в изменении скорости движения Vк зерноуборочного комбайна. Потери зерна Рк за комбайном при изменении скорости движения Vк должны сохраняться предельно допустимыми Рк(Vк)≤ Рк mах, что ограничивает время установки скорости движения Vк, соответствующей оптимальной подаче хлебной массы.
Устройство (фиг.2) содержит битер 1, расположенный на входе в наклонную камеру 2 и вал которого соединен с валом гидромотора 3. К насосу 4, оснащенному регулятором 5 рабочего объема, гидролинией 6 с установленным в ней датчиком давления 7 подключен гидромотор 3. Вал битера оснащен датчиком частоты вращения 8. Датчики частоты вращения 8 и давления 7 подключены к первому и второму входам блока управления 9, а регулятор 5 рабочего объема насоса 4 соединен с первым его выходом. Датчик 10 скорости движения зерноуборочного комбайна и устройство 11 для контроля потерь зерна за комбайном подключены к третьему и четвертому входам блока управления 9, а регулятор 12 скорости движения соединен со вторым его выходом. Дека 13 оснащена датчиком 14 для измерения зазоров между ней и молотильным барабаном и регулятором 15 для изменения зазоров. Датчик 14 подключен к пятому входу в блок управления 9, а регулятор 15 соединен с третьим его выходом.
Устройство работает следующим образом.
В блок управления 9 введено значение дискретного изменения частоты вращения Δ nб, зависящее от допустимой ошибки измерения частоты вращения вала битера 1, и минимальное значение мощности, подводимой к валу битера Nб min, которое не может быть меньше затрат мощности на холостой ход битера 1 Nбx ≤ Nбmin.
После начала уборки скорость движения Vк зерноуборочного комбайна увеличивают, пока потери зерна Рк за комбайном не станут предельно допустимыми Рк max. Скорость движения Vк определяют датчиком 10, а потери зерна за комбайном контролируют устройством 11, сигналы от которых поступают к третьему и четвертому входам блока управления 9. Блок управления 9 является бортовым компьютером зерноуборочного комбайна.
Затем определяют мощность, подводимую к валу битера 1. Первоначальная частота вращения вала битера 1 - максимальная. Частоту вращения nб вала битера 1 измеряют датчиком 8, который подключен к первому входу блока управления 9. Одновременно с началом движения зерноуборочного комбайна регулятором 5 устанавливают максимальный рабочий объем насоса 4. Регулятор 5 соединен с первым выходом блока управления 9, из которого поступает соответствующий сигнал. Крутящий момент на валу битера 1 определяют по значению давления в напорной гидролинии 6, в которой установлен датчик давления 7. Сигнал от датчика давления 7 поступает на второй вход блока управления 9. Крутящий момент на валу битера 1 равен Мб=рqмη м/2π ; где р - давление в гидролинии 6, qм - рабочий объем гидромотора 3 (постоянный), η м - механический кпд гидромотора 3 (постоянный). Наименьшее значение мощности Nб определяют по мерее уменьшения частоты вращения битера 1 с шагом Δ nб путем изменения рабочего объема насоса 4 регулятором 5. По мере уменьшения частоты вращения вала битера 1 значение давления в гидроприводе будет снижаться, а знак разности Δ pj=pj·1-pj будет сохраняться неизменным. По достижении определенного значения nбi мощность Nб станет возрастать (фиг.3) и, следовательно, Δ pj поменяет знак.
Значение Nб, соответствующее моменту изменения знака Δ pj, является наименьшим в конкретных условиях уборки. Подача хлебной массы в зерноуборочный комбайн, соответствующая этому моменту, - оптимальная.
В дальнейшем предлагаемое устройство постоянно уточняет значение nб min с периодичностью, задаваемой согласно условиям уборки вручную или автоматически, и таким образом корректируют значение скорости движения Vк, поддерживая оптимальное значение подачи хлебной массы в зерноуборочный комбайн.
В случае резкого возрастания значения давления в гидроприводе (порционное изменение подачи хлебной массы), регистрируемого датчиком давления 7, из блока управления 9 поступает сигнал к регулятору 15. Зазоры между декой 13 и молотильным барабаном изменяют по заранее установленному закону, соблюдение которого контролируется датчиком 14.
Если зерноуборочный комбайн, выполняя технологический процесс уборки, движется по полю и будет включено предлагаемое устройство (фиг.2), то последовательность определения оптимальной подачи хлебной массы в него будет аналогична описанной.
Предлагаемый способ регулирования подачи хлебной массы в зерноуборочный комбайн устанавливает соотношение между скоростью движения зерноуборочного комбайна и подачей хлебной массы в конкретных условиях уборки: влажность хлебной массы, урожайность убираемой культуры, рельеф и засоренность поля, техническое состояние зерноуборочного комбайна.
В предлагаемом устройстве частота вращения вала битера зависит от его пропускной способности (объема хлебной массы, проходящей через битер за один оборот) и подачи хлебной массы (хлебной массы, срезанной жаткой за определенный период времени).
Крутящий момент на валу битера зависит от механических свойств хлебной массы, соотношения зерновой и незерновой части в ней. Поэтому мощность, подводимая к валу битера, характеризует не только количество хлебной массы, подаваемой в зерноуборочный комбайн, но и ее качественные показатели.
Пример. Убирается озимая пшеница, характеристика которой представлена в таблице. Уборка - раздельная, валок скошен жаткой с шириной захвата 6 м.
Характеристика культуры приведена в таблице.
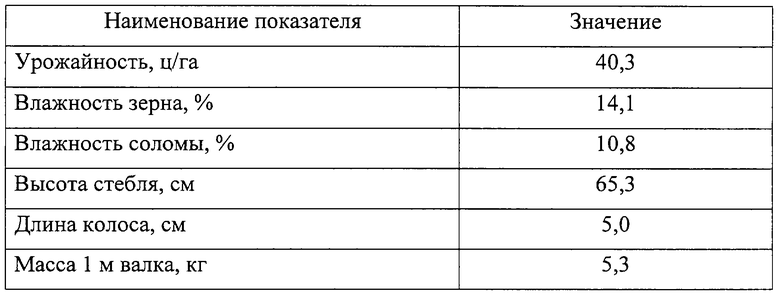
Подбор валков производят комбайном “Дон - 1500”. На фиг.3 изображен график зависимости мощности, подводимой к валу битера, расположенного на входе в наклонную камеру. Зависимость приведена для текущего значения вала битера 183-186 об/мин. Значение Nб min=0,67 кВт получено при скорости Vк=2,54 км/ч, подача хлебной массы 3,73 кг/с.
Предлагаемый способ регулирования подачи хлебной массы в зерноуборочный комбайн и устройство для его осуществления могут быть использованы на различных уборочных машинах для снижения потерь урожая за ними.
Применение предлагаемого способа регулирования подачи хлебной массы в зерноуборочный комбайн и устройство для его осуществления не оказывают отрицательного влияния на окружающую среду, так как снижают потери зерна за комбайном и способствуют уменьшению удельных затрат энергии на выполнение уборочных работ с использованием зерноуборочных и других комбайнов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564865C1 |
| Зерноуборочный комбайн с очесывающей жаткой | 2020 |
|
RU2744619C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2013 |
|
RU2551106C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2010 |
|
RU2414114C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2005 |
|
RU2267249C1 |
| ЖАТКА С АВТОМАТОМ ЗАГРУЗКИ МОЛОТИЛЬНОГО БАРАБАНА | 1992 |
|
RU2065682C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2010 |
|
RU2445762C2 |
| Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном | 2020 |
|
RU2728860C1 |
| Зерноуборочный комбайн | 1981 |
|
SU959670A1 |
При регулировании подачи хлебной массы в зерноуборочный комбайн определяют мощность на валу битера при различных значениях его частоты вращения. Оптимальная подача хлебной массы соответствует наименьшему значению мощности на валу битера. Скорость движения комбайна устанавливают по наименьшему значению мощности расположенного на входе в наклонную камеру битера. Вал битера имеет датчик частоты вращения и соединен с валом гидромотора. Гидромотор подключен гидролинией с датчиком давления к оснащенному регулятором рабочего объема насосу. Датчик частоты вращения и датчик давления подключены к первому и второму входам блока управления. Регулятор рабочего объема соединен с первым выходом блока управления. Регулятор скорости движения соединен со вторым выходом блока управления. Применение способа регулирования подачи хлебной массы в зерноуборочный комбайн и устройства для его осуществления обеспечивает уменьшение удельных затрат энергии при проведении уборочных работ комбайнами. 2 с.п.ф-лы, 3 ил.
| Устройство для регулирования загрузки зерноуборочного комбайна | 1982 |
|
SU1058536A1 |
| Способ оптимизации загрузки зерноуборочного комбайна | 1987 |
|
SU1563626A1 |
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| Автоматический регулятор загрузки молотилки самоходного зерноуборочного комбайна | 1972 |
|
SU488540A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1991 |
|
RU2009632C1 |
| US 3442068 А, 06.05.1969 | |||
| US 3546860 А, 15.12.1970. | |||

