(54) АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ВРАЩЕНИЯ МОТОВИЛА ЗЕРНОУБОРОЧНОЙ МАШИНЫ
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к жаткам и подборщикам зерноуборочных машин.
Известен автоматический регулятор скорости вращения мотовила зерноуборочной машины, содержащий датчик скорости вращения мотовила, датчик скорости движения зерноуборочной машины, управляющий блок и исполнительный механизм 1.
Недостатком данного устройства является наличие потерь, связанных с тем, что во время работы зерноуборочной машины устройство поддерживает постоянным заранее установленное отношение X скорости вращения мотовила ip.M к поступательной скорости движения зерноуборочной машины
V
т. е.
маМ
А Р- : const. Умаш
тогда как показатель кинематического режима А, с целью снижения потерь при изменении скорости, должен изменяться по определенному закону, связанному с состоянием хлебостоя.
Известен также-автоматический регулятор скорости вращения мотовила зерноуборочной машины, содержащий датчик скорости движения машины, датчик скорости вращения мотовила и подборщика, управляющий блок и исполнительный механизм 2.
Однако при использовании этого регулятора наблюдаются большие потери зерна.
Цель изобретения - сократить потери зерна за зерноуборочной машиной путем поддержания оптимального соотношения между скоростью вращения мотовила и скоростью движения зерноуборочной машины.
Поставленная цель достигается тем, что управляющий блок выполнен в виде функцио нального преобразователя и снабжен задатчиком начальных показателей кинематического режима работы мотовила в зависимости от состояния убираемой культуры.
Регулятор также содержит логическое
15 устройство, двоичный счетчик и дешифратор, причем, входы логического устройства соединены с датчиком скорости движения зерноуборочной мащины и задатчиком начальных показателей кинематического режима, а
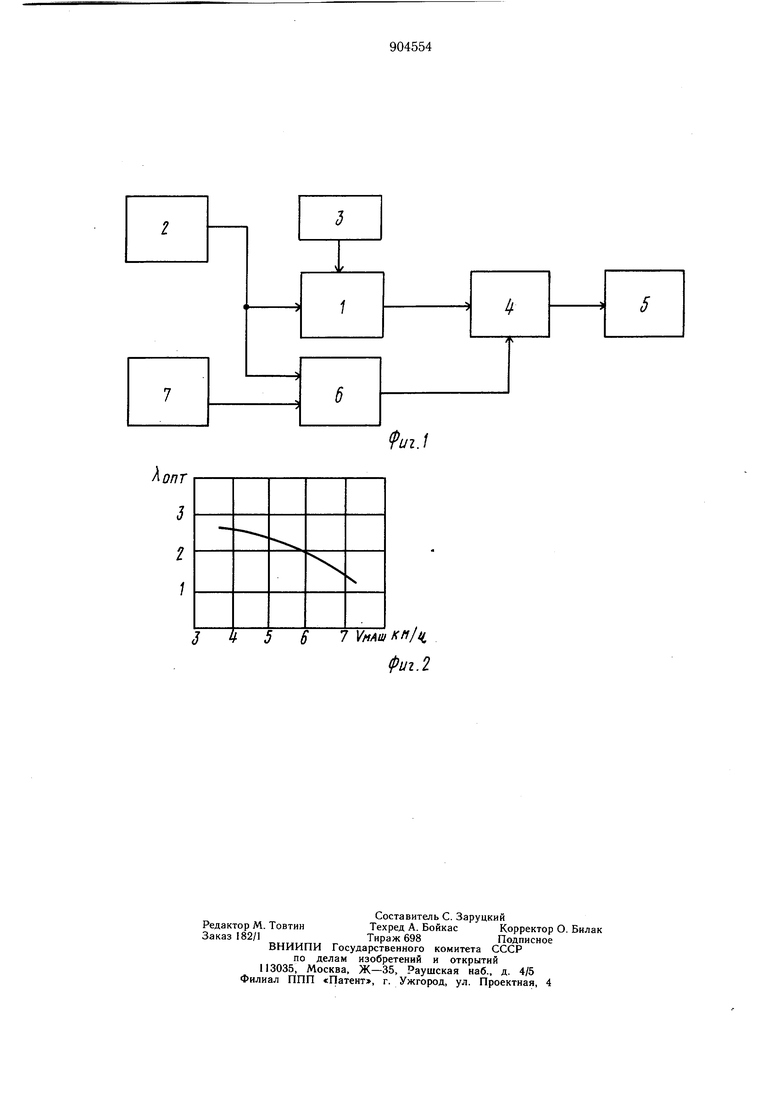
20 вь1ход - с первым входом дешифратора, выход которого соединен с исполнительным механизмом, а второй вход соединен с выходом двоичного счетчика, входы которого соединены с датчиком скоростей. На фиг. 1 изображена функциональная схема автоматического регулятора скорости вращения мотовила зерноуборочной машины; на фиг. - график зависимости оптимального значения показателя, кинематического режимаАОПТ. от поступательной скорости зерноуборочной машины апроксимкрующей функцией которой является функция вида - +Ло , реализируемая функциональным преобразователем устройства, где k - коэффициент, определенный экспе.ментально; .0-начальная установка показателя в зависимости от состояния хлебостоя. Автоматический регулятор скорости вращения мотовила зерноуборочной машины состоит из логического устройства I, входы которого соединены с выходами датчика 2 скорости движения зерноуборочной машины и задатчика 3 начального показателя кинематического режима в зависимости от состояния убирае.мой зерновой культуры, а выход подключен к перво.му входу дешифратора 4, выход которого соединен с исполнительным механизмом 5, а второй вход соединен с выходом двоичного счетчика 6, входы которого соединены с датчиком 2 скорости движения зерноуборочной машины и датчиком скорости вращения мотовила 7 (подборщика). Автоматический регулятор скорости вращения мотовила работает следующим образом. Сигналы с датчика 2 скорости движения зерноуборочной машины и с задатчика 3 начального показателя кинематического режима АО, подаются на логическое устройство 1, на выходе которого получают код, соответствующии оптимальному значению показателя кинематического режима работы Ядггг с учетом начального показателя AQ , поступаюший далее на вход дешифратора 4. Двоичный счетчик 6 преобразует сигналы датчиков 2 и 7 в код, соответствующий их отношению обратно пропорциональный i, который также подается на вход дешифратора 4. В результате сравнения двух кодов, пропорциональных значениям Ji и А дешифратором вырабатывается управляющий сигнал на устранение рассогласования А Ад. или Л Лопт который подается на исполнительный механизм 5, управляющий вариатором скорости вращения мотовила (подборщика). Применение на зерноуборочной машине автоматического регулятора, осуществляющего изменение кинематического режима работы мотовила по закону убывающей прямой А -К Vf(,ag| + Ло или по другой убывающей зависимости, по сравнению с работой в режиме А const позволяет сократить потери на косовице хлебов и на подборе валков. Данный регулятор может быть применен и для подборщика зерноуборочной машины. Формула изобретения 1. Автоматический регулятор скорости вращения мотовила зерноуборочной машины, содержащий датчик скорости движения зерноуборочной машины, датчик скорости вращения мотовила и подборщика, управляющий блок и исполнительный механизм, отличающийся тем, что, с целью сокращения потерь зерна, путем поддержания оптимального соотнощения между скоростью вращения мотовила и скоростью движения зерноуборочной машины, управляющий блок выполнен в виде функционального преобразователя и снабжен задатчиком начальных показателей кинематического режима работы мотовила в зависимости от состояния убираемой культуры. 2. Регулятор по п. I, отличающийся тем. что функциональный преобразователь содержит логическое устройство, двоичный счетчик и дещифратор, причем входы логического устройства соединены с датчиком скорости движения зерноуборочной машины и задатчиком начальных показателей кинематического режима, а выход - с первым входом дешифратора, выход которого соединен с исполнительным механизмом, а второй вход соединен с выходом двоичного счетчика входы которого соединены с датчиками скоростей. Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании № 1375827, кл. А 01 D 69/0.0, 1974. 2. Сабликов М. В. Сельскохозяйственные машины, ч. И, М., 1968, с. 157.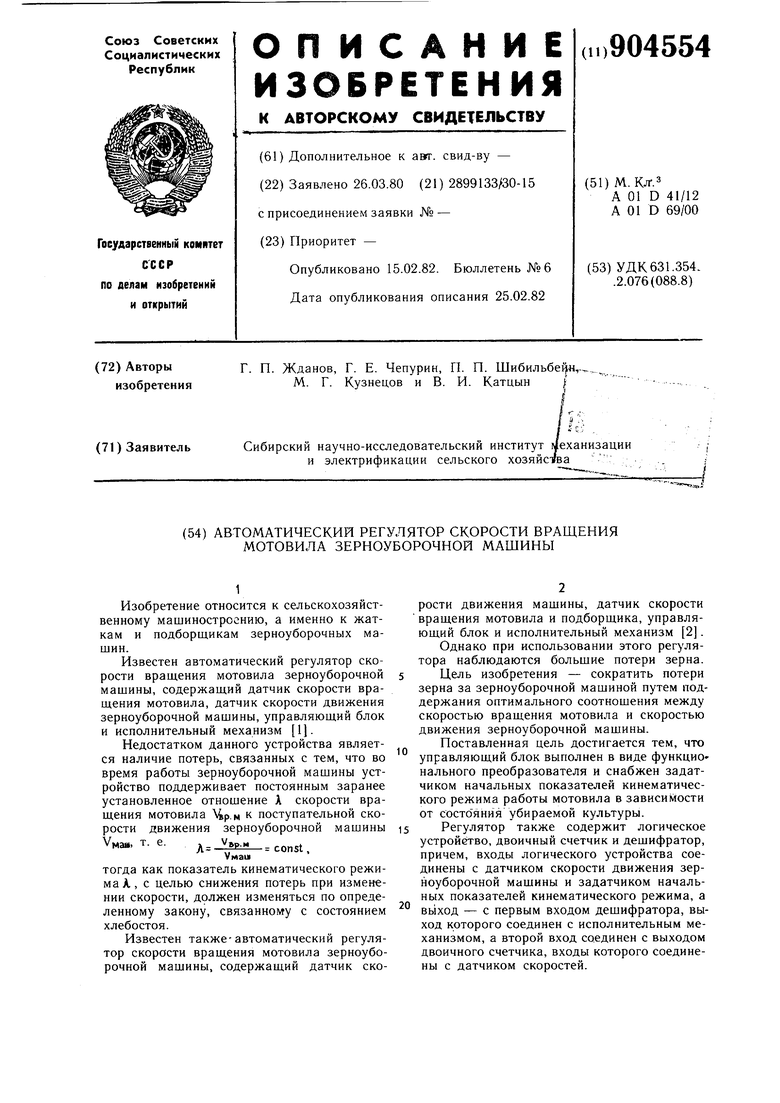
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор частоты вращения мотовила или подборщика зерноуборочной машины | 1983 |
|
SU1111702A1 |
| Способ регулирования частоты вращения мотовила | 1984 |
|
SU1228797A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1976 |
|
SU745417A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Комбайновый тренажер | 1985 |
|
SU1310880A2 |
| Термостатирующее устройство | 1980 |
|
SU943666A1 |