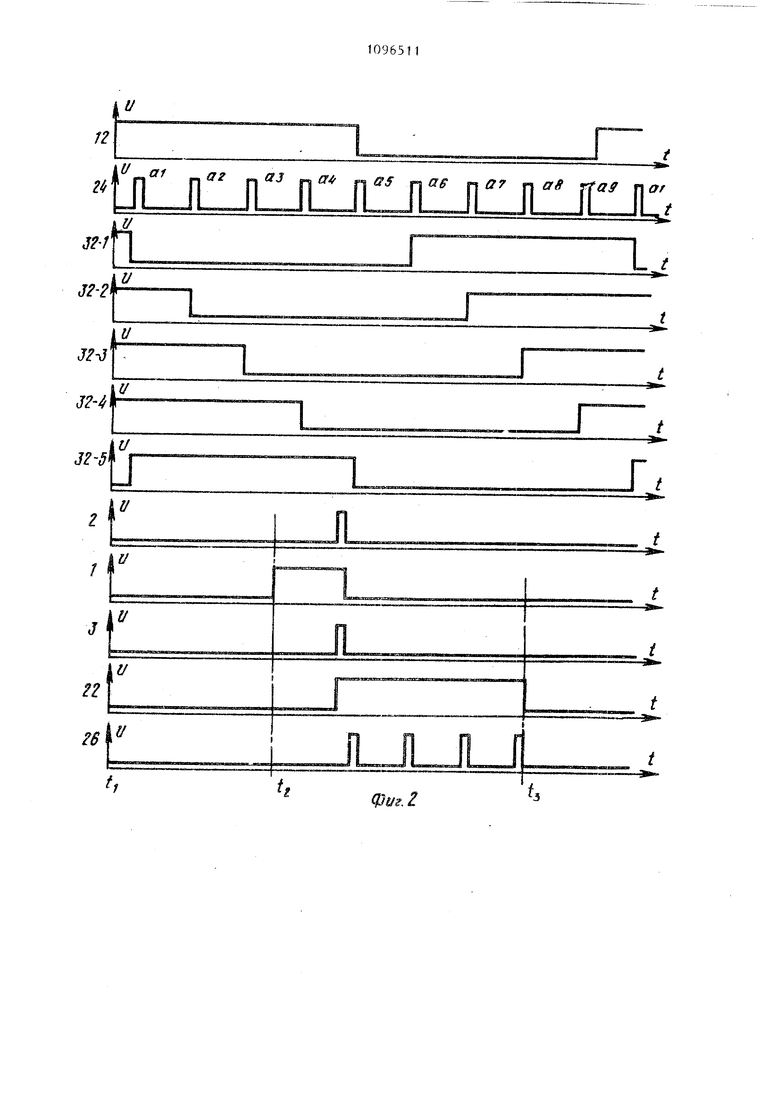
Изобретение относится к балансир вочной технике и может быть использ вано в станках для балансировки роторов электродвигателей при коррекции дисбалансов установкой грузов на штырях между лопатками ротора. Известно измерительное устройство к балансировочному станку. Устройство содержит генератор опорных сигналов и два измерительных канала каждый из которых состоит из соединенных последовательно датчика дисбаланса, сумматора, второй вход которого соединен с датчиком другого измерительного канала, и усилителя, а также двух синхронных детекторов, первые входы которых соединены между собой и с выходом усилителя, а вторые входы - с выходом генератора опорных сигналов, и двух измерителе проекций, каждьрл из которых подключен к выходу одного из синхронных детекторов. Устройство обеспечивает измерение параметров дисбаланса ротора по двум плоскостям измерения одновременно в прямоугольной систем координат С 13. Недостаток такого устройства заключается в том, что в случае приме нения его в станке для балансировки роторов асинхронных электродвигателей, не обеспечивается требуемая точность балансировки. Коррекция ди баланса у таких роторов разрешена между лопатками крыльчатки ротора. Количество лопаток крыльчатки не ме нее девяти (угол между лопатками в этом случае равен 40°), поэтому при измерении дисбаланса в прямоуго ной системе координат оператору невозможно без дополнительных расчето точно определить корректирующие мас сы, устанавливаемые между лопатками крьшьчатки. Наиболее близким по технической сущности |с изобретению является измерительное устройство к балансировочному станку, содержащее блок управления, генератор опорных сигналов, два измерительных канала, каждый из которых выполнен в виде соед ненных последовательно датчика дисбаланса, сумматора, второй вход кот рого связан с датчиком дисбаланса другого измерительного канала, усилителя и формирователя, двух синхро ных детекторов, первые входы которы соединены между собой и с выходом усилителя, двух измерителей проекци кажд.м из которых связан с выходом одного из синхроньых детекторов, и триггера, и логический элемент 2И, выход которого связан с входом блока управления. Устройство содержит также выполненные в каждом измерительном канале два пороговых элемента, вход каждого из которых связан с выходом соответствующего синхронного детектора, логический элемент 2ИЛИ, входы которого связаны с выходами пороговых элементов, а выход - с первым входом триггера, элемент временной задержки, вход которого подключен к выходу триггера, а выход - к первому входу логического элемента 2И, второй вход последнего связан с выходом логического элемента 2ИЛИ, последовательно соединенные второй сумматор и аналоговый ключ, входы второго сумматора связаны с вьгходом генератора опорных сигналов, управляющий вход ключа - с выходом триггера, выход - с вторым входом усилителя, а второй вход триггера - с выходом блока управления 23. Недостаток известного устройства заключается в том, что в случае применения его в станке для балансировки роторов асинхронных электродвигателей, устройство не обеспечивает разложения дисбаланса на составляющие по местам, разрешенным для коррекции дисбаланса (между лопатками крьшьчатки ротора), что не позволяет получить требуемую точность балансировки. Цель изобретения- повышение точности балансировки. Поставленная цель достигается тем, что измерительное устройство к балансировочному станку, содержащее блок управления, генератор опорных сигналов, два измерительньо; канала, каждьй из которых выполнен в виде соединенных последовательно датчика дисбаланса, сумматора, второй вход которого соединен с выходом датчика дисбаланса другого измерительного канала, усилителя и формирователя, двух синхронных детекторов, входы которых соединены между собой и с выходом усилителя, двух измерителей проекций, каждьй из которых связан с выходом одного из синхронных детекторов, и триггера, и логический элеменг 2И, выход которого связан с входом блока управления, снабжено расположенными 31 в каждом измерительном канале последовательно соединенными датчиком лопаток, вторым логическим элементом 2И, десятичным счетчиком и цифровым индикатором, и пятиразрядным кольцевым регистром, первый вход которого соединен с выходом формироваteля, второй вход - с выходом датчика лопаток, первьй выход - с вторым входом первого синхронного детектора второй выход - с R-входом триггера и вторым входом второго синхронного детектора, а выход триггера связан с вторым входом второго логического элемента 2И, входы первого логическо го элемента 2И связаны с выходами блока управления и генератора опорных сигналов, а выход - с S-входом триггера и вторым входом десятичного счетчика в обоих измерительных каналах. На фиг. 1 изображена блок-схема измерительного устройства к балансировочному станку; на фиг. 2 - времен ные диаграммы работы элементов измерительного устройства; на фиг. 3 нанесенная на торец ротора асинхронного электродвигателя векторная диаграмма. Устройство содержит блок 1 управления, генератор 2 опорных сигналов, логический элемент 2И 3, выход которого связан с входом блока 1 управления, и два измерительных канала 4 и 5, каждый из которых выполнен в ви де соединеиньк последовательно датчи ка 6 (7) дисбаланса, сумматора 8 (9) второй вход которого соединен с выходом датчика 7 (6) дисбаланса другого измерительного канала 5 (4), усилителя 10 (11) и формирователя 12 (13), двух синхронных детекторов 14 и 15 (16 и 17), первые входы которых соединены между собой и с входом уси лителя 10 (11), двух измерителей 18 и 19 (20 и 21) проекций, каждый из которых связан с выходом одного из синхронных детекторов 14 или 15 (16 или 17), триггера 22. (23), последовательно соединенных датчика 24 (25) лопаток, второго логического элемента 2И 26 (27), десятичного счетчика 28 (29), цифрового индикатора 30 (31) и пятиразрядного коль цевого регистра 32 (33), первый вход которого соединен с выходом формирователя 12 (13), второй вход - с выходом датчика 24 (25) лопаток, первы выход - с вторым входом первого син114хронносо десектора 14 (16), второй - с F-нхолом триггера 22 (23) и вторым входом второго синхронного детектора 15 (17), а выход триггера 22 (23) связан с вторь1м входом второго логического элемента 2И 26 (27), входы первого логического элемента 2И 3 связаны с выходами блока 1 управления и генератора 2 опорных сигналов, а выход - с S-входом триггеров 22 и 23 и вторыми входами десятичных счетчиков 28 и 29 в обоих измерительных каналах. На временной диаграмме (фиг. 2) работы элементов измерительного устройства представлены уровни или форма напряжений на выходах элементов, номера которых, обозначенные в левой части фиг. 2, соответствуют номеру элементов на фиг. 1. Уровню логической единицы соответствует высокий уровень напряжения, а уровню логического нуля - низкий уровень напряжения. Через Ц обозначено время начала измерения, через tg - начало отсчета номера штыря 34 на торце ротора 35, на который по технологии балансировки ротора одевается корректирующий груз (не показан) при коррекции дисбаланса, а через t конец измерения. На векторной диаграмме (фиг. 3), нанесенной на торец ротора 35 асинхронного электродвигателя, через W обозначен вектор начального дисбаланса ротора 35 в плоскости коррекции, через W и Wj проекции W на разрешенные направления коррекции (наиболее близкие к W j штыри), через Н и Н,- оси проекций (фаза сигнала, подаваемого на второй вход синхронного детектора 14 и 15 (16 и 17) в качестве опорного), через Од - номера штырей 34 ротора 35 в порядке прохождения их под датчиком 24 (25) лопаток по ходу вращения ротора 35 при балансировке. Номер ы присваивается первому штырю 34 после вектора Мц. Стрелкой обозначено направление вращения ротора 35 при балансировке. Через N обозначен импульс от генератора 2 опорного сигнала, который совпадает с расположением шпоночного паза 36 на валу ротора (с учетом статической ошибки в 40°). Для коррекции дисбаланса W (фиг. 3) необходимо измерить проекции .дисбаланса Уц2на разрешенные направления коррекции и выдать one51ратору станка информацию о том, на какой штырь 32 и какой массы требует ся добавить груз. Очевидно, что ввиду большого количества лопаток на роторе (на фиг. 3 приведен вид с торца ротора 35 асинхронного электродвигателя с высотой оси 112 мм 5 у которого девять лопаток крыльчатки ротора оператору необходимо определить также номер штыря 34 (или номера штырей 34), в котором требуется произвести коррекцию дисбаланса Устройство работает следующим образом. Колебания опор станка, пропорциональные дисбалансу ротора 35 синхрон . ного электродвигателя в плоскости опоры (не показаны), воспринимаются и преобразовываются в электрический сигнал датчиком 6 (7) дисбаланса, связанным с опорой балансировочного станка. С помощью сумматоров 8 и 9 производится разделение плоскостей коррекции. Выходной сигнал сумматора 8 (9) усиливается и фильтруется от помех усилителем 10 (11) и поступает на входы синхронных детекторов 14 (16), 15 (17) и на вход формирователя 12 (13). Импульсы прямоугольной формы с выхода формирователя 12 (13) поступают на первый вход кольцевого регистра 32 (33). Выходные импульсы каждого из разрядов регистра 32 (33) изображены на фиг. 2 и обозначены через 32-1 - 32-5 (33-1 - 33-5). На второй вход регист ра 32 (33) поступают импульсы с датчик 21 (25) лопаток, который представляет собой датчик периферийного действия, например, емкостный или ин дуктивньй, с входящим в него формирователем импульсов, что позволяет получить импульс малой длительности при прохождении лопатки над датчиком 24 (25) лопатки. Так как все раз ряды рег1%стра 32 (33) устанавливаются в 1 передним фронтом импульса с выхода формирователя 12 (13), фаз которого зависит- от углового располо жения дисбаланса W, то фаза выходных импульсов на выходах триггеров регистра 32 (33) зависит от угловог расположения вектора W и от расположения лопаток (штырей) на роторе 35. Как видно из векторной диагр мы (фиг. 3), к синхронным детекторам 14 и 15 (16 и 17) следует подве ти опорный сигнал с инверсного вьгхо да второго разряда регистра 32 (пер 1 6 вьш выход) и с прямого выхода третьего разряда регистра 32 (второй выход). Эти импульсы ортогональ вы к направлениям W (второй выход и W 2 (первый выход). На выходе синхронного детектора 14 (16) получают постоянное напряжение, пропорциональное Wfi2 а на выходе синхронного детектора 15 (17) - Wf. С выходов синхронных детекторов 14 и 15 (16 и 17) постоянные напряжения поступают на входы измерителей 18 и 19 (20 и 21) проекций соответственно и запоминаются. Каждый из измерителей 18 (20) и 19 (21) проекций может быть реализован с помощью, например, аналогового запоминающего устройства и стрелочного прибора (не показаны). В монЁнт времени t с блока 1 управления на второй вход логического элемента 2И 3 поступает высокий уровень напряжения, разрещаюций прохождение импульсов с выхода генератора 2 опорных сигналов .-на S-вход триггера 22 (23). Передний фронт каждого из импульсов генератора 2 опорных сигналов совпадает с разположением шпоночного паза 36 на валу балансируемого ротора 35, кинематически связанного с генератором 2 опорных сигналов. На R-вход триггера 22 (23) поступают импульсы с второго выхода регистра 32 (33). Так как фаза импульса с выхода генератора 2 зависит от расположения шпоночного паза 36 балансируемого ротором 35, а фаза сигнала второго выхода регистра 32 (33) связана с угловым расположением проекции начального дисбалан са W,, то на выходе триггера 22 (23) формируется импульс напряжения, длительность которого пропорциональна углу между расположением шпоночного паза 36 и осью коррекции W. Для перевода длительности импульса с выхода триггера 22 (23) в цифровую форму сигнал с выхода триггера 22 (23) поступает на вход элемента 2И 2 (27), разрешая тем самым прохождение импульсов с выхода датчика 24 (25) лопаток на счетньш вход десятичного счетчика 28 (29), который устанавли вается в нулевое состояние передним фронтом импульса с выхода элемента 2И 3, поступившим на второй вход счетчика 28 (29). Таким образом, в десятичный счетчик 28 (29) заяисы вается порядковый номер (по направлению вращения ротора 35 при баланси
7109
ровке) штыря 34 между лопатками ротора 35, через который проходит ось коррекции W. Ошибка в один номер учитывается при наладке станка установкой ге;нератора 2 опорных сигналов. Записанный в счетчик 28 (29) номер индицируется цифровым индикатором 30 (31). По заднему фронту импульса с выхода элемента 2И 3, поступившего на вход блока 1 управления, снимается разрешающая команда на выходе блока 1. Вто
8
рая ось коррекции W 2 легко находится оператором, так как она проходит через следующий по ходу вращения штырь 34. Аналогично работает и другой измерительный канал.
Таким образом, оператору станка выдается информадия, в каком по номеру штыре (отсчет ведется от шпонки на валу ротора) и какую массу требуется скорректировать для достижения допустимого дисбаланса, что повышает точность балансировки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Способ настройки балансировочного станка | 1984 |
|
SU1388735A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259119A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
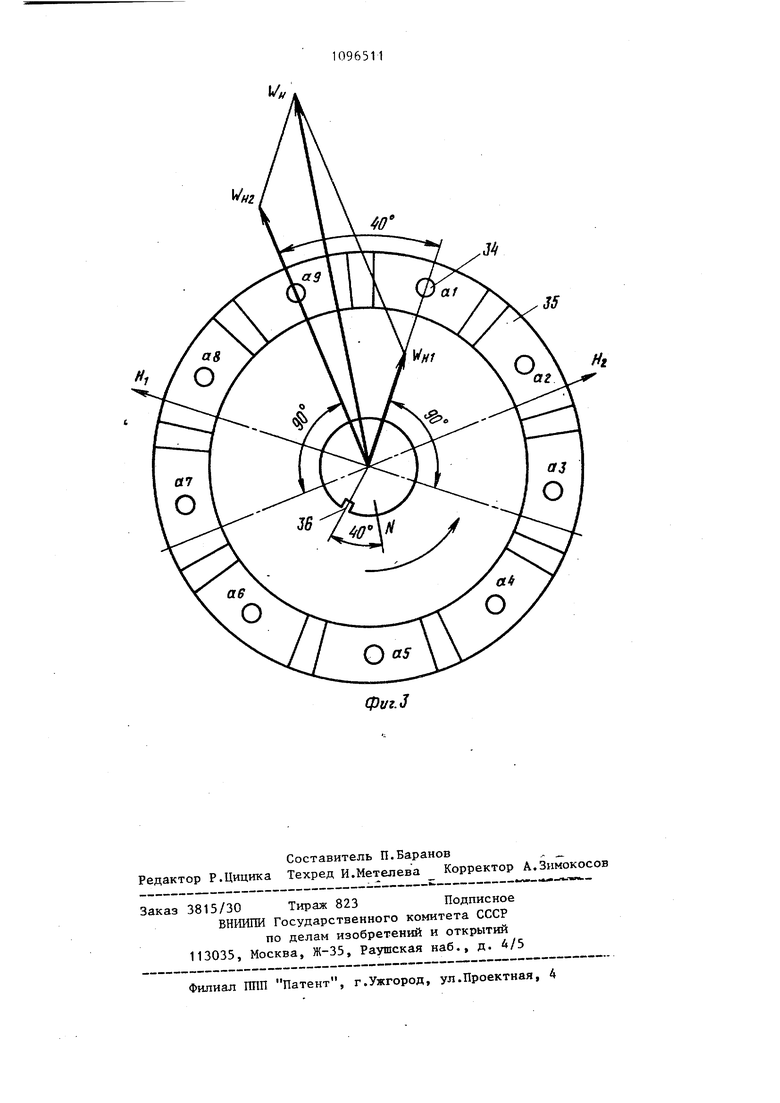
Фиг-З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 761863, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
