1
Изобретение относится к автоматическому регулированию и может быть применено для управления электромеханическими исполнительными механизмами с неопределенными параметрами, например в промьиплен- ных роботах и манипуляторах, в станках с числовым программным управлением и др.
Цель изобретения - повышение быстродействия и расширение области применения системы.
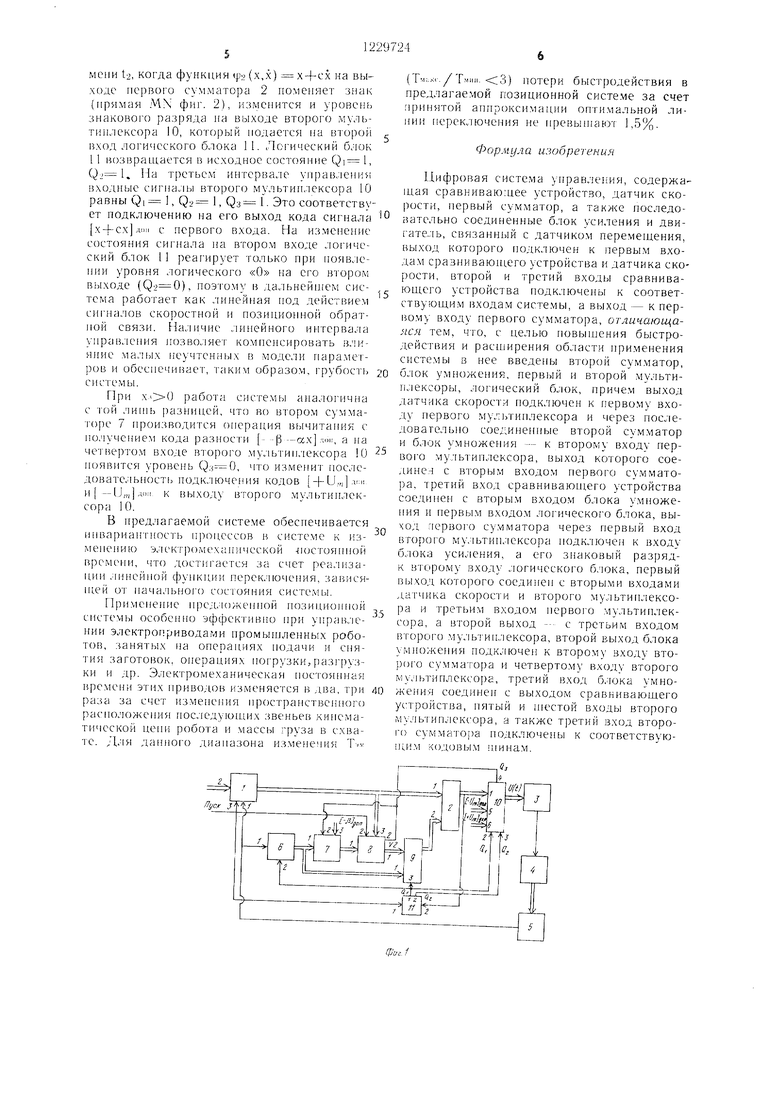
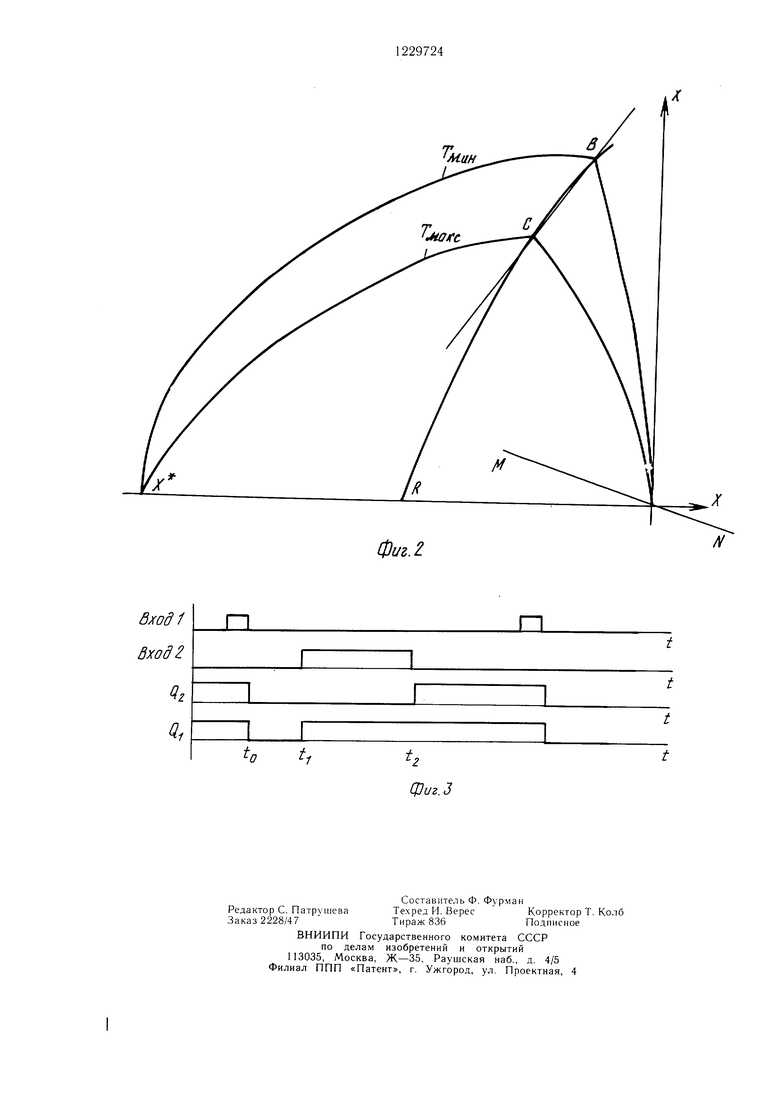
На фиг. 1 приведена блок-схема цифровой системы управления; на фиг. 2 - траектории движения системы на фазовой плоскости; на фиг. 3 - временные диаграммы работы логического блока.
Система содержит сравниваюшее устройство 1, первый сумматор 2, блок 3 усиления, двигатель 4, датчик 5 перемепдения, датчик б скорости, второй сумматор 7, блок 8 умножения, первый 9 и второй 10 мультиплексоры, логический блок 11.
Сравнивающее устройство 1 формирует сигнал ошибки в дополнительном коде 1х|дол и построено на базе реверсивного счетчика. В зависи.мости от направления врапл.е- ния и.мпульсы от датчика 5 перемещения поступают на суммирующий либо вычитаю- входы счетчика. По сигналу «Пуск, приходящему на третий вход сравнивавощего устройства 1, в реверсивный счетчик записывается значение кода задания .-wn., поданного на второй вход сравнивающего устройства 1. В качестве датчика 5 перемеп1ения используется фотоэлектрический датчик инкрементального типа, имеющий две выходные шины. При этом он формирует в зависимости от направления вращения последовательность импульсов на одной из шин, на второй шине будет высокий уровень. На выходе датчика скорости формируется дополнительный код сигнала , где величина коэффициента г зависит от сигнала на втором входе датчика скорости. Датчик 6 скорости работает по принципу подсчета числа импульсов от датчика 5 перемещения за интервал времени, величина которого определяется уровнем сигнала на втором входе датчика 6 скорости. Если на второй вход датчика (i скорости подан уровень логической «1, тс обеспечивается равенство г с, и па выходе датчика 6 скорости присутствует сигнал |с., если подап уровень логического «О, то г а, и на выходе датчика 6 скорости будет сигнал а..
Второй сумматор 7 позволяет получать дополнительпый код разности или суммы кода -Р1дол и кода , подаваемого на первый вход сумматора 7. Если на второй вх(Х1 подан уровень логической «1 (), производится операция суммирования. Если па второй вход второго сумматора 7 подан уровень логического «О (), то из кода - Р. вычитается код, подаваемый на первый вход второго сумматора 7.
29724
Блок 8 умножения выполняет операцию умножения кода задания на код, подаваемый на первый вход. На первый выход блока 8 умножения подается результат произведения, а на второй выход - знак величи- 5 ны Xi лоп, т. е. уровень «О, если и уровень «1, если .
Если на третий вход мультиплексора 9 подан уровень логической «1, то на выход мультиплексора 9 пройдет сигнал с первого 10 входа, если подан уровень «О, то на выход пройдет сигнал со второго входа первого мультиплексора 9.
Первый сумматор 2 позволяет получить сумму двух чисел, представленных в параллельном дополнительном коде. 5 Второй мультиплексор 10 осуществляет коммутацию входов 1, 5, 6 в зависимости от состояния сигналов Qi, Q2, Qs на входах 2, 3, 4. Если , к выходу второго мультиплексора 10 1тодключен первый вход, если 20 Qa (QiQ3+ QiQ3) 1 то подключен шестой вход, если Q2 (QiQs + QiQ3) 1, то подключен пятый вход.
Логический блок 11 управляет работой датчика 6 скорости, первого мультиплексора 9, второго мультиплексора 10, т. е. опре- 25 деляет режим работы системы в целом.
Блок 3 усиления осуществляет операцию преобразования сигнала управления, представленного в дополнительном коде в длительность импульса с последующим усилением. В качестве усилителя мощности используется мостовая схема реверсивного усилителя мощности, в диагональ которого включен двигатель 4. Направление вращения двигателя определяется знаковым разрядом кода U юп на выходе второго мультиплексора 10.
Система работает следующим образом.
Входными сигналами являются сигнал задания и сигнал «Пуск, формируемые функциональными элементами системы управления верхнего уровня. 40 Фазовая траектория системы при отработке задания хз,.. состоит из участков разгона, торможения и линейного участка.
При включении напряжения питания устанавливается нулевой код ошибки на выходе сравнивающего устройства 1 и нулевой код скорости на выходе датчика 6 скорости. Логический блок 11 при этом переходит в исходное состояние (Qi I, р9 1), что соответствует работе системы в линейном режиме и фиксации рабочего органа в исходном по
ложении.
Рассмотрим случай, когда входное задание х: отрицательно (знаковый разряд «1), фазовые траектории системы изображены на фиг. 2. Началу отработки задания (момент to) соответствует подача кода задания , на второй вход сравпивающего устройства 1. При поступлении сигнала «Пуск код хз dop записывается в реверсивном счетчике сравнивающего устройства 1, после чего сигнат
ошибки . с выхода сравнивающего устройства 1 записывается в регистр блока 8 умножения.
По заднему фронту импульса «Пуск логический блок I переходит из состояния Qi 1, Q2 1 в состояние , . Низкому уровню на первом выходе логического блока 11 соответствует сигнал ах дом на выходе датчика 6 скорости. Второй сумматор 7 производит операцию суммирования ах - .В блоке 8 умножения это выражение умножается на величину .,и результат произведения V хз() .wn. подается на второй вход первого мультиплексора 9. Низкий уровень логического «О на третьем входе первого мультиплексора подключает на его выход сигнал V с второго входа, который в дальнейшем суммируется с сигналом xj.101, в первом сумматоре 2. Таким образом сигнал на выходе сумматора 2 равен
х + .
На первом интервале управления при О входные сигналы второго .мультиплексора 10 равны Qi 0, , Qa 1, что соответствует подключению на его выход кода управления + Um.ion.. Этот сигнал поступает на вход блока 3 усиления, где преобразуется в длительность импульса и усиливается на усилителе мош.ности, построен- но.м по мостовой схеме, знаковый разряд кода + и,. однозначно определяет направление вращения двигателя.
Таким образом осуществляется максимальный разгон двигателя, а длительность интервала разгона (ti-to) при фиксированном значении х зависит от величины электромеханической постоянной времени двигателя. Пренебрегая электромагнитными переходными процессами в двигателе, его динамику описывают в безразмерных координатах дифференциальным уравнением
x(t)T3M + x(t) U, ,
где электромеханическая постоянная времени Тэм Тмин, Тмакс принимает произвольное значение из заданного интервала и остается неизменной в процессе одного перемещения. Для заданного начального условия хз и произвольной величины электро.механической постоянной времени Тэ.м уравнения фазовых траекторий системы на интервалах (to, ti) и (ti, t i) и.меют вид
Xi(ti)
J dx, x,(t«)
,(1г) J dx, jCt,)
Xa(t2) , T..-J
ZiCto)
Хг)
-Тэ«-
Xi(ti)
X2dX2
Xj(tl)
(1+X2)
где xi X, X2 X, U + 1 на первом- интервале, U - 1 на втором интервале (при .
0
5
0
5
0
5
0
5
0
5
Учитывая, что система позиционная, т. е.
Xi(to)X3, X2(to)0, X2(t2)0. X|(t2)0,
вычислив соответствующие интегра, 1ы и записав отношение левых и правых частей приведенных выражений, получим уравнение оптимальной линии переключения в виде x(t,)X3(-.x+ ln)l+.xi)/(lnfl-x| +
-f Itt/l+x/) хз f(x(ti)), которой на фиг. 2
соответствует кривая RB.
Таким образом, в предлагаемой системе обеспечиваются оптимальные по быстродействию переходные процессы при переходе из состояния х-(1о)хз, x(to)0 в состояние x(t2)0, .x( для произвольных значений Тэм, если переключение управляющего воздействия происходит на кривой RB Аппроксимируем линию переключения RB для заданного хэ прямой СВ, уравнение которой имеет вид
x(t,)- |x3/-(ax(t,)-f , sgnx3)0 или
X(t,) +хз(-ах(t,)sgnx3- р) О,
где аир - постоянные коэффициенты, которые задают положение прямой СВ, аппроксимирующей оптимальную линию переключения RB (, р 0). Координаты точек С и В определи.м из условия пересечения фа- зовы.ми траекториями разгона при граничных значениях Тэм линии переключения RB. Эффективность такой аппроксимации обусловлена ограниченным диапазоном изменения электромеханической постоянной времени (обычно ТмаксуТ И11. 1,3 ) для которого оптимальная линия переключения достаточно точно аппроксимируется прямой.
Таким образом в момент времени ti, когда функция переключения на выходе первого 2 сумматора
9j(x,x,X3) х+ хз(а.х-р), изменит знак, то логический блок 11 перейдет в новое состояние , , что соответствует подключению на выход второго 10 мультиплексора его пятого входа. В результате сигнал U(t) изменит знак на противоположный, обеспечивая динамическое торможение двигателя 4 на интервале (ti, t2). Некоторое время т логический блок И после момента ti не реагирует на изменение состояния второго входа. Величина т определяется инерционностью датчика 6 скорости и исключает ложные переключения логического блока 11.
Высокому уровню на первом выходе логического блока 11 соответствует сигнал на выходе датчика 6 скорости, который подается на первый вход мультиплексора 9. Так как с первого выхода логического блока 11 на третий вход первого мультиплексора 9 подается уровень логической. «1, то код сигнала cxj.ion. с первого входа первого мультиплексора ,9 подается на второй вход сумматора 2. Сигнал на выходе сумматора 2 равен х-|-сх доп. В момент вреМС11И ta, когда функция р:(х,х) х-} Сх на выходе первого еумматора 2 поменяет знак (|рямая MX фиг, 2), изменится и уровень знакового разряда на выходе второго муль- тинлекеора 10, ко горый нодаетея на второй вход логического блока 11. Логический блок 11 возвращается в исходное состояние Qi 1, Q;,l, На третвем интервале управления 1.одные снгна;1В1 второго мультиплексора 10 равны QI 1, Q- 1, Q3 1. Это соответствует подключению на его выход кода сигнала х + )| С первого вхол1а. На изменение состояния сигнала на втором входе логический блок 11 реаг ирует только при нояв.ю- НИИ уровня логического «О на его втором выходе (), поэтому в дальнейн1ем система работает как линейная под действием си1 малов ско)оетной и позинионной обратной евязи. Fia.riHMHe линейного интервала унрав.тепия позволяет компенсировать в.ли- яние малых (зеучтенных в модели параметров и обееиечи1 ает, таким образом, грубость системьг
При работа системы аналогична с той липП) разницей, что во втором сумматоре 7 производится операция в 1читапия с по.чучением кода разности - -|3 -ах лон, а па четвертом входе второго .мультин.чексора 10 появится уровень , что изменит поеле- довате;1ьност) подключения кодов -|-и,,, ,v: и I -и.„ , к выходу второго мул1 тинлек- сора 10.
В предлагаемой системе обеспечивается И11вариа1ггиоеть процессов в системе к из- мененик) электромеханической .(кх тояпной времени, что достигается за счет реа-лиза- ции линейной функции перек. почеиия, зависи- Hiert от начально1 о состояния системы.
При.менеине предложенной позиционной снетемы особешю эффектив110 при унрав.ле- нии .электроприводами промьпиленных роботов, занятых на операциях иодачи и еня- тия заготовок, онерациях погрузки,раз1 )уз- ки и др. Электромеханическая поетоянная вре.мени этих приводов изменяется в два, три раза за счет 11змене11ия нространствешюго расположения иос,:1едующих звеньев кинематической цени робота и .массы груза в схва- те. Для данного диапазона из. Т-.-.0
0
5
0
5
0
(Тм../Тм1П1. ;3) потери быстродействия в предлагаемой позиционной систе.че за счет принятой аппроксимации опти.мальной линии переключения не нревьинают 1,5%.
Формула изобретения
Цифровая система унравлеиия, содержащая сравнивающее устройство, датчик скорости, первый сумматор, а также последовательно соединенные блок усиления и двигатель, связанный с датчиком перемещения, выход которого подключен к лервы.м входам сравнивающего уетройства и датчика скорости, второй и третий входы сравнивающего устройства подключены к соответствующим 15ходам систе.мы, а выход - к пер- во.му входу первого сумматора, отличающаяся тем, что, с целью гювынления быетро- действия и расщирения области нри.менения системы в нее введены второй сум.матор, блок умножений, первый и второй .мультиплексоры, логический блок, приче.м выход датчика скорост.и подключен к первому входу первого .му. Л)ТИплекеора и через последовательно соединенные второй сумматор и блок у.множения - к втором} входу первого мультиплексора, выход которого соединен с вторым входом первого еумматора, третий вход сравниваюн1его устройства соединен с вторы.м входо.м блока у.множения и первым входо.м логического блока, выход первого сумматора через первый вход второго му,1ьтии.1екеора подключен к входу блока уси;|ения, а его зн аковый разряд- к второму входу логичеекого б.чока, первый выхо.ч. которого соедппеп е вторыми входами датчика екорости и второго .му;|ьтиплексо- ра и третьи.м входо.м первого .мультин.чек- с(зра, а второй выход -- с третьим входом второго мультиплекеора, второй выход блока умпожепия подключен к второму входу второго сумма го)а и четверто.му входу второго мультиплексо)а, третий вход б,тока умно- жегщя соединен с выходом сравнивающего устройства, пятый и гпестой входы второго мультиплексора, а также третий вход второ- го сум.мато)а подключены к соответствую- HUi.M ко..1,овым щина.м.
f
) I Iг / ЗД Г . J Jaoi}
г-Ц гМ- ЧPft
. М
Т
Мин
фиг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для автоматического управления числом силовых двухобмоточных трансформаторов двухтрансформаторной подстанции | 1989 |
|
SU1644295A1 |
| Устройство для предварительной фильтрации входных сигналов узкополосных цифровых фильтров | 1990 |
|
SU1739481A1 |
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |
| Устройство для распознавания на линейность булевых функций | 1990 |
|
SU1756879A1 |
| Полунатурный стенд для испытаний вентильного электродвигателя | 1987 |
|
SU1536500A1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВРЕМЕННЫХ СДВИГОВ | 2002 |
|
RU2229157C2 |
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Двухкоординатная система программного управления | 1980 |
|
SU938264A1 |
Изобретение относится к системам управления. Цель изобретения - повышение быстродействия и расширения области применения - достигается тем, что в систему, содержаш.ую сравнивающее устройство, датчик скорости, первый сумматор, блок усиления, двигатель, датчик скорости, введены второй сумматор, блок умножения, два мультиплексора и логический блок. 3 ил. ю го со ND N
| Регулятор | 1979 |
|
SU830299A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
