Изобретение относится к автоматике землеройно-транспортных машин цик- /таческого действия и может быть использовано для управления ковшом скрепера.
Цель изобретения - оптимизация производительности.
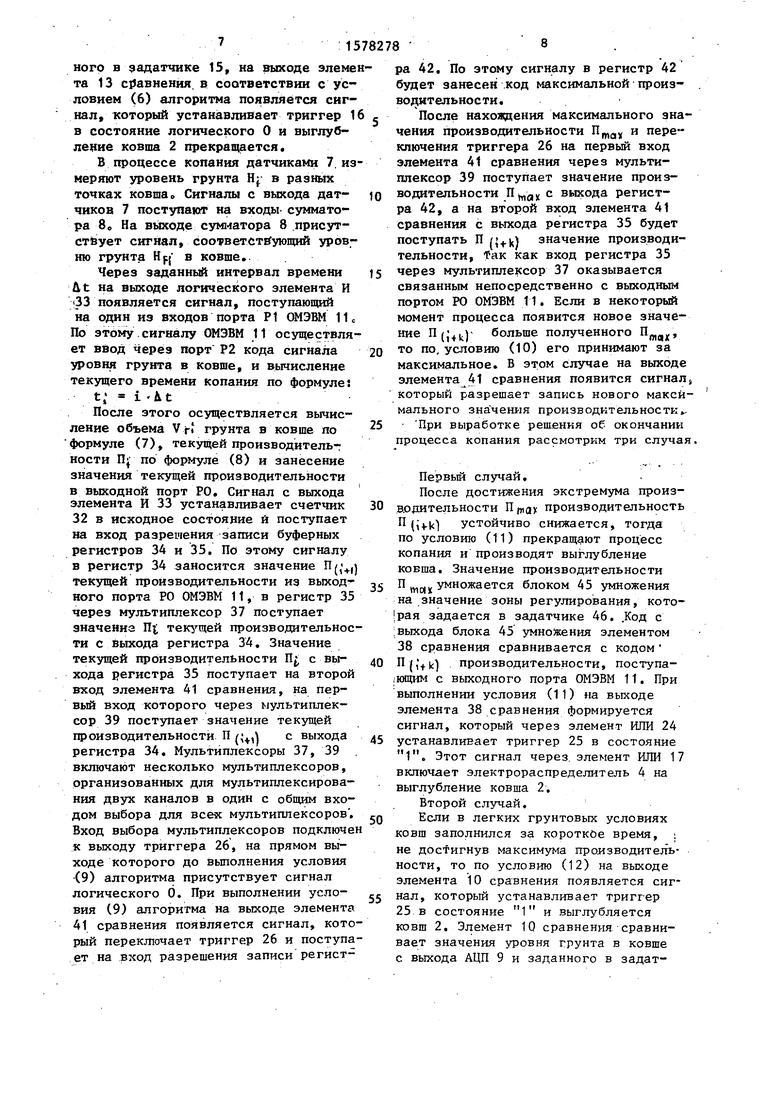
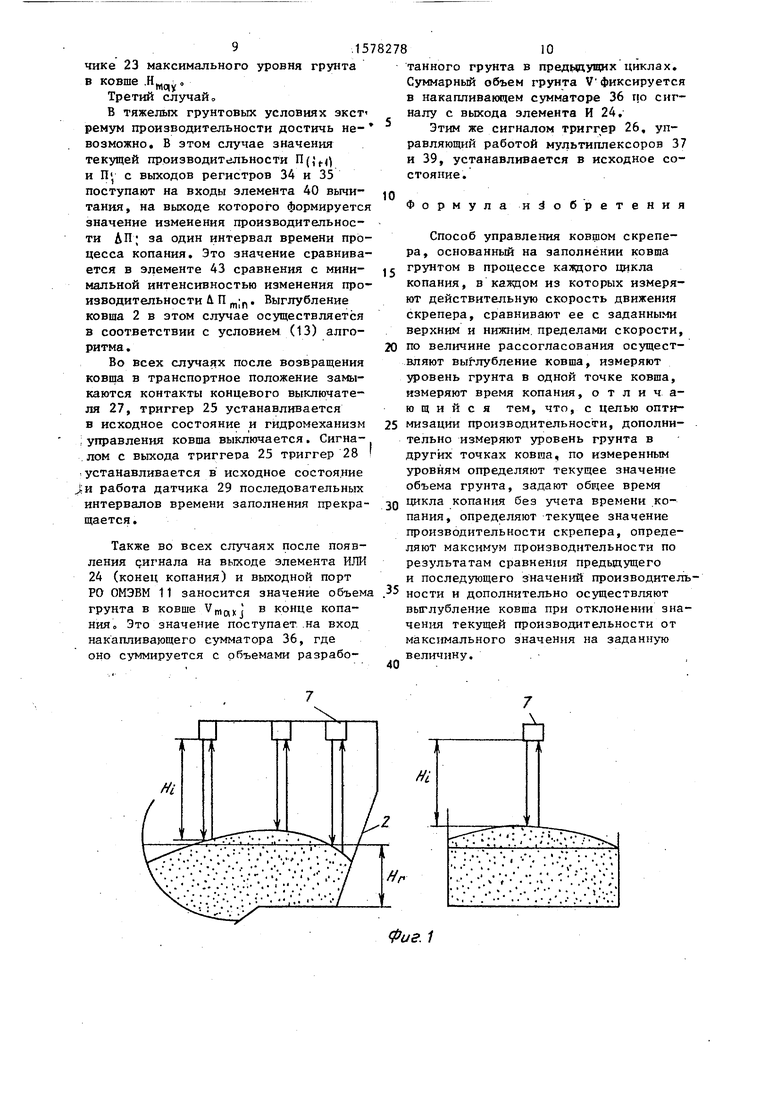
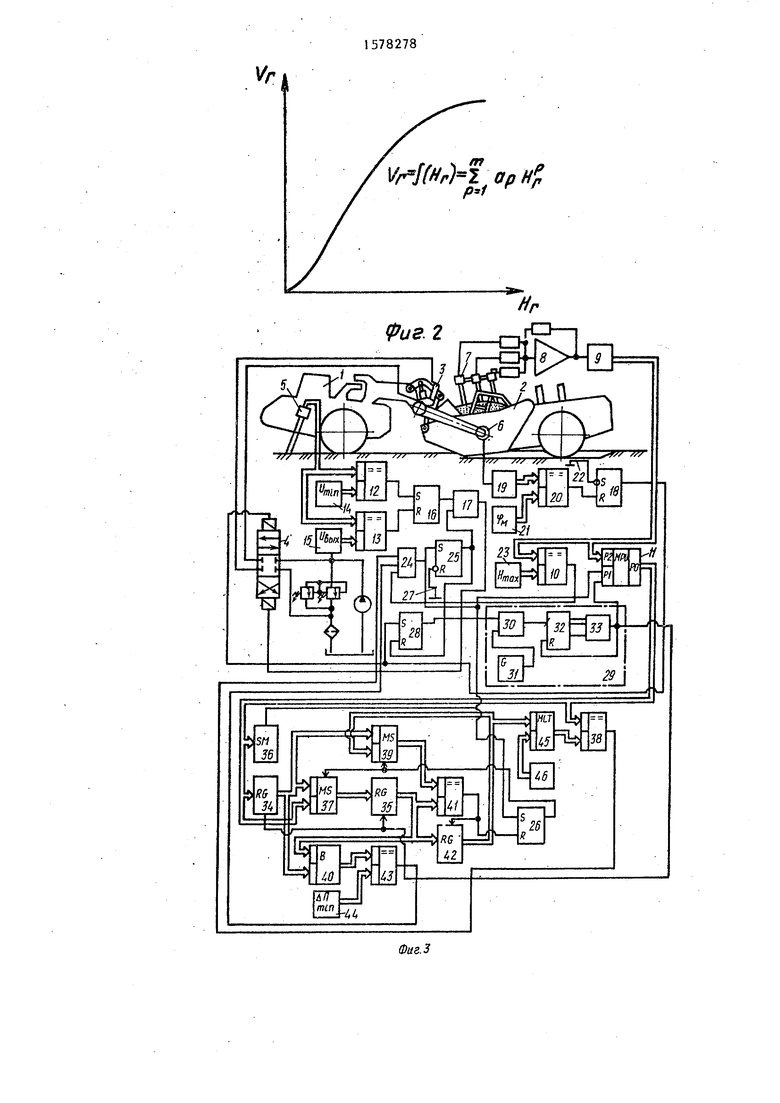
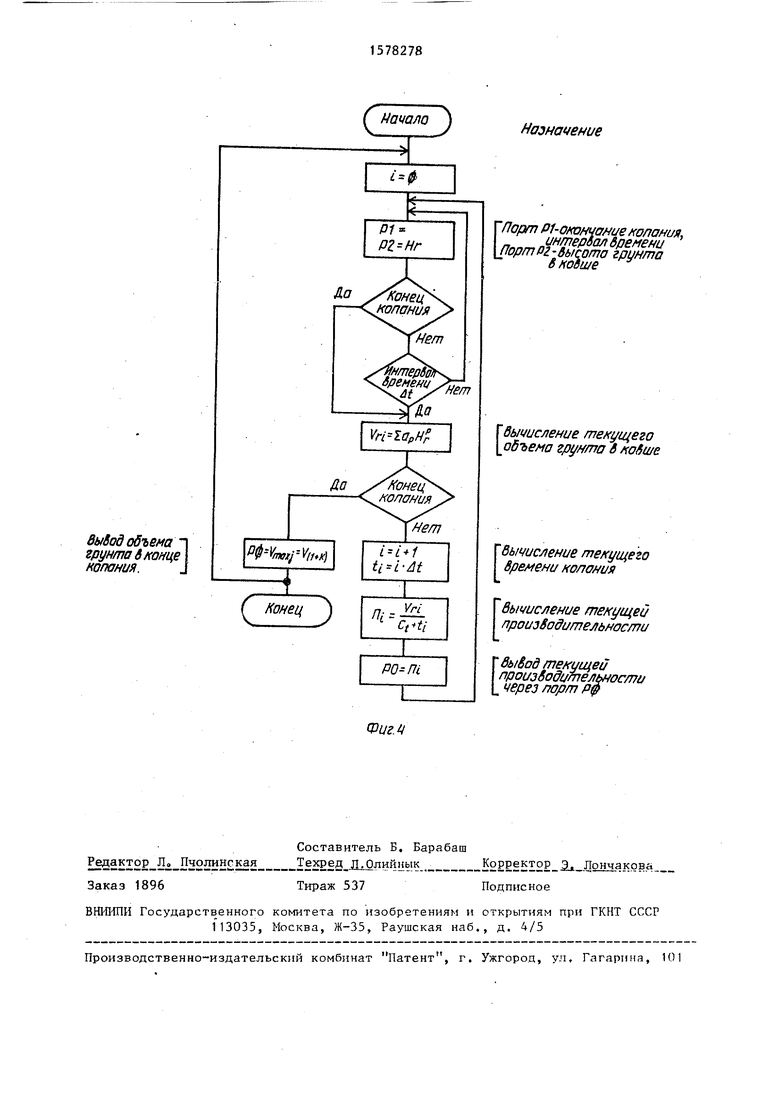
На фиг. 1 приведена расчетная схема определения грунта в ковше; на .фиг „ 2 - зависимость объема грунта от высоты заполнения; на фиг. 3 - устройство управления ковшом скрепера; на фиг. 4 - блок-схема алгоритма работы.
На фиг0 3 изображены тягач 1 с тяговой рамой, ковш 2 скрепера, гидроцилиндры 3 вертикального перемещения и электрогидрораспределитель 40
Устройство, реализующее предлагаемый способ, содержит датчик 5 действительной скорости, датчик 6 угла поворота шарнира тяговой рамы, дат- чики 7 уровня грунта, сумматор 8, аналого-цифровой преобразователь (АЦП) 9, элемент 10 сравнения, однокристальную микроЭВМ (ОМЭВМ) 11, элементы 12 и 13 сравнения, задатчик 14 нижнего предела регулггрования скорости, задатчик 15 верхнего предела регулирования скорости, триггер 16, элемент ИЛИ 17, триггер 18, АЦП 19, элемент 20 сравнения, задатчик 21 угла пово
рота шарнира, переключатель 22, за- датчик 23 максимального уровня, элемент ИЛИ 24, триггеры 25, 26, концевой выключатель 27, триггер 28, датчик 29 последовательных интервалов времени, элемент И 30, генератор 31 импульсов, счетчик 32, элемент И 33, регистры 34 и 35, сумматор 36, мультиплексор 37, элемент 38 сравнения, мультиплексор 39, элемент 40 вычитания, элемент 41 сравнения, регистр 42, элемент 43 сравнения, -задатчик 44 минимальной интенсивности изменения производительности, блок 45 умножения, задатчик 46 интервала регулирования производительности.
Управление ковшом скрепера осуществляется в соответствии с разработанным алгоритмом:
х
Ч
де х, х
вкл
t t;
-сигнал управления распределителем, сигнал включения распределителя ковша;
-время копания, время последовательных интервалов процесса копания;
5
5
0
5
0
5
0
Н,Ч Н Н та
г.
g
V,
П-. П
max
АП;, ДП
расстояние от излучав теля датчика до поверхности грунта в ковше, высота грунта в ковше, максимальный уровень грунта в ковше}
действительная скорость движения при копании, нижний предел регулирования скорости движения, скорость движения, при которой выключают распределитель ковша (верхний предел);
текущий объем грунта в ковше;
текущая производительность скрепера, ее максимальное значение; индекс последовательных интервалов процесса, индекс последо-- вательных интервалов процесса копания после достижения экстремума производительности;
ПИЦ
х J V
5
изменение производительности за один интервал времени процесса , минимальная интенсивность изменения производительности; абъем грунта в ковше в конце копания; суммарный объем грунта, разработанный скрепером за время работы;
Cf, Срц - текущий угол поворота шарнира тяговой рамы относительно ковша, угол поворота, соответствующий величине начального заглубления;
с. - заданное общее время рабочего цикла копания без учета времени копанияо
Управление ковшом скрепера осуществляют следующим образом.
При движении скрепера на рабочей передаче начинают заглубление ковша и одновременно включают датчик измерения последовательных интервалов времени копания. Эти действия описываются операторами (1) и (2) алгоритма. При заглублении ковша по углу (J поворота шарнира тяговой рамы относительно ковша (что соответствует некоторому перемещению гидроцилиндров ковша) контролируют величину начального заглубления. Когда начальное заглубление достигает- заданного значения, то есть угол поворота (J достигает значения угла , соответствующего определенной величине начального заглубления, то в соответствии с условием (3) алгоритма прекращают заглубления ковша. С этого момента процесс копания совершают некоторое время при неподвижных штоках гидроцилиндров ковша. В процессе копания измеряют датчиками уровня грунта Н в разных точках ковша и определяют его среднее значение по формуле (4) алгоритма. .
Наличие датчиков уровня грунта в разных точках ковша связано с продольным и поперечным очертанием грунта в ковше.
После прекращения копания поднимают ковш, .запоминают величину объема грунта в ковше (14) и суммируют его
с объемом грунта предыдущих циклов скрепера по формуле (15) алгоритма. После этого совершают транспортные операции и снова повторяют процесс копания в рассмотренной последовательности.
Устройство, реализующее предлагаемый способ, работает следующим образом.
При движении скрепера на рабочей
передаче кратковременным замыканием контактов кнопочного переключателя 22 триггеры 18 и 28 устанавливаются в состояние логической 1. Сигналом с выхода триггера 18 включается электрозолотник 4 на заглубление ковша 2. По сигналу с выхода триггера 28 начинает работу датчик 29 последовательных интервалов времени процесса копания о По этому сигналу импульсы
с выхода генератора 31 поступают на счетный вход счетчика 32. Счетчик 32 и логический элемент И 33 служат для задания последовательных интервалов времени процесса заполнения ковша 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| Система управления рабочим органом землеройной машины | 1988 |
|
SU1548365A1 |
| СКРЕПЕРНЫЙ АГРЕГАТ | 2005 |
|
RU2295610C2 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
Изобретение относится к автоматике землеройно-транспортных машин циклического действия и может быть использовано для управления ковшом скрепера. Цель изобретения - оптимизация производительности (П). Для этого в процессе копания измеряют действительную скорость движения V G скрепера и сравнивают ее с заданными верхним и нижним пределами скорости V MIN и V вык. По результатам сравнения осуществляют выглубление ковша. Кроме того, измеряют уровень грунта ковша в разных точках ковша и время T I копания. По измеренным уровням грунта определяют текущее значение объема V ГI грунта. Задают общее время цикла C T копания без учета времени копания и определяют текущее значение П скрепера П I по формуле П I=V ГI/(C T+T I). Затем находят максимум П по результатам сравнения предыдущего и последующего значений П. При отклонении значения текущей П от максимального значения на заданную величину осуществляют выглубление ковша. 4 ил.
В процессе копания по мере увеличе- 30 CKPenePaПри заглублении ковша 2 изменяетния объема грунта, набранного в ковш, возрастают силы сопротивления копанию грунта скрепером и уменьшается действительная скорость движения скрепера.
Если в процессе копания грунта скорость движения снизилась ниже заданного уровня vw-n , то по условию (5) алгоритма осуществляется включение гидромеханизма подъема ковша. После восстановления значения скорости до заданного значения vBbll(, прекращают подъем ковша (условие (б).
Одновременно через заданные интервялы времени вычисляют объем V г; в ковше по формуле (7) и текущую производительность П| по формуле (8) алгоритма, путем деления текущего объема грунта в ковше Vr| на сумму времени цикла с t + t,-. Если по условию (9) производительность П ( достигла экстремума, то это значение запоминают как ее максимальное значение и с ним сравнивают последующие текущие значения производительности. Если в некоторый момент процесса появится новое значение П ( больше полученного, то по условию (10) его принимают за максимальное.
35
40
ся значение сигнала с выхода датчика 6 угла поворота шарнира тяговой рамы 1 относительно ковша 2. Сигнал с выхода датчика 6 через АЦП 19 поступает на первый вход элемента сравнения 20, второй вход которого связан с задатчиком 21 угла (JH , соответствующего начальному заглублению ковша 2. Когда угол Ср достигает заданного
то в соответствии с
значения
условием (3) алгоритма триггер 18 устанавливается в состояние логического 0 и заглубление ковша 2 прекрад5 щается. С этого момента совершают копание при неподвижных штоках гндроци- линдров 3 ковша.
В процессе копания грунта скорость скрепера может снизиться до заданного
50 задатчиком 14 значения v . В этом случае в соответствии с условием (5) алгоритма на выходе элемента сравнения 12 появляется сигнал, который устанавливает триггер 16 в состояние логической 1 о Этот сигнал через элемент ИЛИ 17 включает электрогидрорас- пределитель 4 на выглубление ковша 2 скрепера После восстановления скорости скрепера до значения Vea, задан55
ся значение сигнала с выхода датчика 6 угла поворота шарнира тяговой рамы 1 относительно ковша 2. Сигнал с выхода датчика 6 через АЦП 19 поступает на первый вход элемента сравнения 20, второй вход которого связан с задатчиком 21 угла (JH , соответствующего начальному заглублению ковша 2. Когда угол Ср достигает заданного
то в соответствии с
значения
условием (3) алгоритма триггер 18 устанавливается в состояние логического 0 и заглубление ковша 2 прекра5 щается. С этого момента совершают копание при неподвижных штоках гндроци- линдров 3 ковша.
В процессе копания грунта скорость скрепера может снизиться до заданного
0 задатчиком 14 значения v . В этом случае в соответствии с условием (5) алгоритма на выходе элемента сравнения 12 появляется сигнал, который устанавливает триггер 16 в состояние логической 1 о Этот сигнал через элемент ИЛИ 17 включает электрогидрорас- пределитель 4 на выглубление ковша 2 скрепера После восстановления скорости скрепера до значения Vea, задан5
ного в эадатчике 15, на выходе элемета 13 сравнения в соответствии с условием (6) алгоритма появляется сигнал, который устанавливает триггер 1 в состояние логического 0 и выглубление ковша 2 прекращается.
В процессе копания датчиками 7 измеряют уровень грунта Hj. в разных точках ковшао Сигналы с выхода дат- чиков 7 поступают на входы сумматора 8в На выходе сумматора 8 присутствует сигнал, соответствующий уровню грунта Нр|- в ковше.
Через заданный интервал времени ut на выходе логического элемента И 33 появляется сигнал, поступающий на один из входов порта Р1 ОМЭВМ 11с По этому сигналу ОМЭВМ 11 осуществляет ввод через порт Р2 кода сигнала уровня грунта в ковше, и вычисление текущего времени копания по формуле
t; i fct
После этого осуществляется вычисление объема V п грунта в ковше по формуле (7), текущей производительности П по формуле (8) и занесение значения текущей производительности в выходной порт РО. Сигнал с выхода элемента И 33 устанавливает счетчик 32 в исходное состояние и поступает на вход разрешения записи буферных регистров 34 и 35. По этому сигналу в регистр 34 заносится значение )} текущей производительности из выходного порта РО ОМЭВМ 11, в регистр 35 через мультиплексор 37 поступает значение П, текущей производительности с выхода регистра 34. Значение текущей производительности П с выхода регистра 35 поступает на второй вход элемента 41 сравнения, на первый вход которого через мультиплексор 39 поступает значение текущей производительности П (-+л с выхода регистра 34. Мультиплексоры 37, 39 включают несколько мультиплексоров, организованных для мультиплексирования двух каналов в один с общим входом выбора для всех мультиплексоров . Вход выбора мультиплексоров подключе к выходу триггера 26, на прямом выходе которого до выполнения условия (9) алгоритма присутствует сигнал логического 0. При выполнении условия (9) алгоритма на выходе элемента 41 сравнения появляется сигнал, который переключает триггер 26 и поступает на вход разрешения записи регист
5
0
ра 42. По этому сигналу в регистр 42 будет занесен код максимальной производительности.
После наховдения максимального значения производительности Птах и переключения триггера 26 на первый вход элемента 41 сравнения через мультиплексор 39 поступает значение производительности П с выхода регистра 42, а на второй вход элемента 41 сравнения с выхода регистра 35 будет поступать П ({tfcj значение производительности, fAK как вход регистра 35 через мультиплексор 37 оказывается связанным непосредственно с выходным портом РО ОМЭВМ 11. Если в некоторый момент процесса появится новое значение П(| + (с) больше полученного Птах, то по, условию (10) его принимают за максимальное. В этом случае на выходе элемента 41 сравнения появится сигналs который разрешает запись нового максимального значения производительности.
При выработке решения об окончании процесса копания рассмотрим три случая.
Первый случай.
После достижения экстремума производительности производительность П (,fkl устойчиво снижается, тогда по условию (11) прекращают процесс копания и производят выглубление ковша. Значение производительности
П тахумножается блоком 45 умножения на значение зоны регулирования, кото- рая задается в задатчике 46. .Код с выхода блока 45 умножения элементом 38 сравнения сравнивается с кодом
П(,%+|,:) производительности, поступающим с выходного порта ОМЭВМ 11. При выполнении условия (11) на выходе элемента 38 сравнения формируется сигнал, который через элемент ИЛИ 24
устанавливает триггер 25 в состояние 1. Этот сигнал через элемент ИЛИ 17 включает электрораспределитель 4 на выглубление ковша 2. Второй случай.
Если в легких грунтовых условиях ковш заполнился за короткое время, не достигнув максимума производительности, то по условию (12) на выходе элемента 10 сравнения появляется сигнал, который устанавливает триггер 25 в состояние 1 и выглубляется ковш 2. Элемент 10 сравнения сравнивает значения уровня грунта в ковше с выхода АЦП 9 и заданного в задатчике 23 максимального уровня грунта в ковше .Нмс,у,
Третий случайо
В тяжелых грунтовых условиях экст ремум производительности достичь не- возможно, В этом случае значения текущей производительности Ilf,1 и П с выходов регистров 34 и 35 поступают на входы элемента 40 вычитания, на выходе которого формируется значение изменения производительности ДП; за один интервал времени процесса копания. Это значение сравнивается в элементе 43 сравнения с минимальной интенсивностью изменения производительности Л П m;n. Выглубление ковша 2 в этом случае осуществляется в соответствии с условием (13) алгоритма .
Во всех случаях после возвращения ковша в транспортное положение замыкаются контакты концевого выключателя 27, триггер 25 устанавливается в исходное состояние и гидромеханизм управления ковша выключается. Сигна- лом с выхода триггера 25 триггер 28 устанавливается в исходное состояние и работа датчика 29 последовательных интервалов времени заполнения прекращается .
Также во всех случаях после появления дигнала на выходе элемента ИЛИ 24 (конец копания) и выходной порт РО ОМЭВМ 11 заносится значение объема грунта в ковше Vmnxj в конце копания Это значение поступает на вход накапливающего сумматора 36, где оно суммируется с объемами разработ
27810
тайного грунта в предыдущих циклах. Суммарный объем грунта V фиксируется в накапливающем сумматоре 36 по сигналу с выхода элемента И 24.
Этим же сигналом триггер 26, управляющий работой мультиплексоров 37 и 39, устанавливается в исходное состояние.
Формула изобретения
10
5
Способ управления ковшом скрепера, основанный на заполнении ковша грунтом в процессе каждого цикла копания, в каждом из которых измеряют действительную скорость движения скрепера, сравнивают ее с заданными верхним и нижним пределами скорости,
0 по величине рассогласования осуществляют выглубление ковша, измеряют уровень грунта в одной точке ковша, измеряют время копания, отличающийся тем, что, с целью опти5 мизации производительности, дополнительно измеряют уровень грунта в других точках ковша, по измеренным уровням определяют текущее значение объема грунта, задают общее время цикла копания без учета времени копания, определяют текущее значение производительности скрепера, определяют максимум производительности по результатам сравнения предыдущего и последующего значений производительности и дополнительно осуществляют выглубление ковша при отклонении значения текущей производительности от максимального значения на заданную
величину. 0
0
5
7
h
н;
« ..
. ч ...
. 5
Фиг. 1
win
Vrtfo 2f ар Hpr
(pus. 2
12
S
ВыВод объема грунта 6 конце копания. J
( Кмсц 3
С Начало}
Назначение
чание капания,
Г вычисление текущего объема грунта 6 ковше
Вычисление текущего Времени колония
Вычисление текущей производительности
Г вы Вод текущей производительности L через порт Рф
| Способ управления процессом черпания фронтального погрузчика | 1985 |
|
SU1305273A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
