Изобретение относится к робототехнике и может быть использовано при создании электроприводов промьш ленных роботов. Известно устройство для управления электроприводом робота, содержащее первый и второй ключи, первый и второй широтно-импульсные модуляторы, дифференциатор, мультивибратор, первьш и второй сумматоры,триггер и элемент резерва L1}. Однако известное устройство имее низкие динамические характеристики. Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные триггер, первый ключ, первый блок сравнения, усилитель и двигатель, связанный с датчиком положения, выход которого подключен через последовательно соединенные преобразователь скорости и второй ключ -ко второму входу первого блока сравнения, третьим входом подсоединенного к выходу элемента И, первый вход которого соединен со вторым вы ходом триггера, первым выходом под-. ключенного ко второму входу преобра зователя скорости.,а первым входом к первому входу устройства С2 Д. Недостатком данного устройства яв ляется высокая чувствительность к и менению параметров исполнительного механизма, что не позволяет использовать его с заданной точностью для управления электроприводами,у кото рых момент инерции меняется в широком диапазоне. Цель изобретения - повышение точ ности устройства. Цель достигается тем, что устрой ство для управления электроприводом робота содерж1-1т формирователь импульса, элементы ШШ и последовател
но соединенные второй блок сравнения, шифратор и блок памяти, выход которого подключен ко второму входу элемента И, второй вход - к первому входу второго блока сравнения и второму входу устройства, а третий вход - ко второму выходу шифратора и первому входу элемента И1Ш, выходом соединенного со вторым входом второго ключа, а вторым входом со вторым входом преобразователя скорости, второй и третий выходы которого подключены к соответствующим входам шифратора, второй вход второго блока сравнения соединен с
5 А, В, С, D, Q,
и и.
2 Э
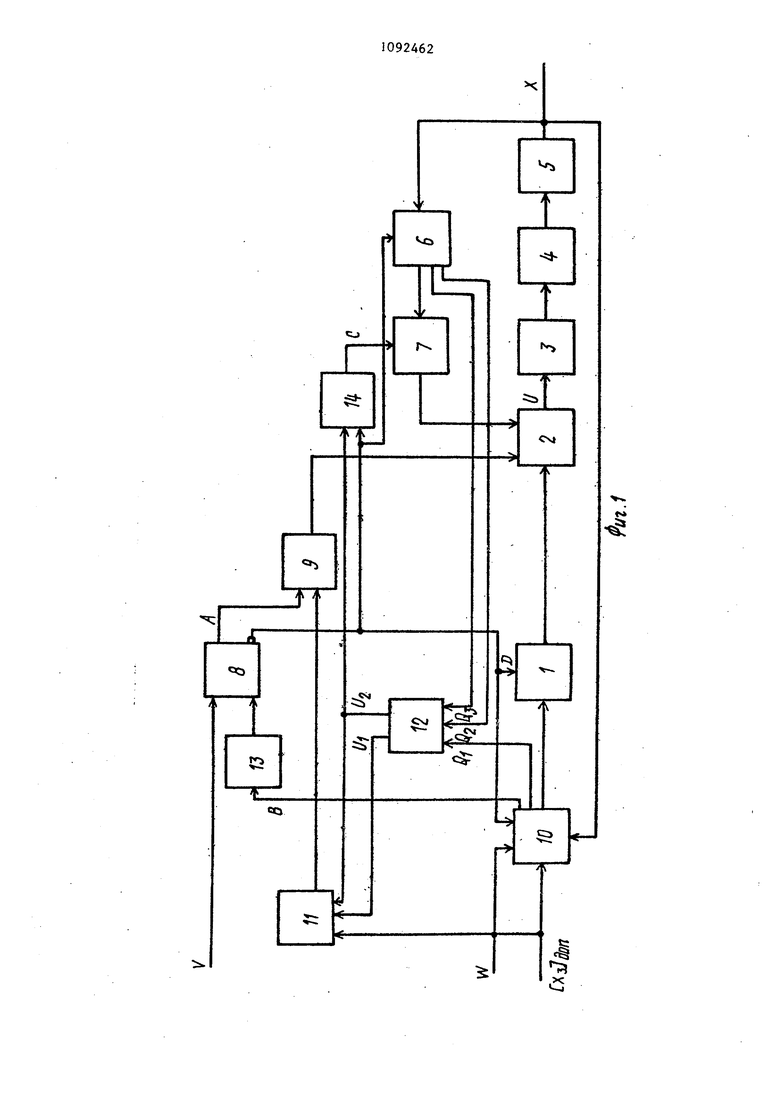
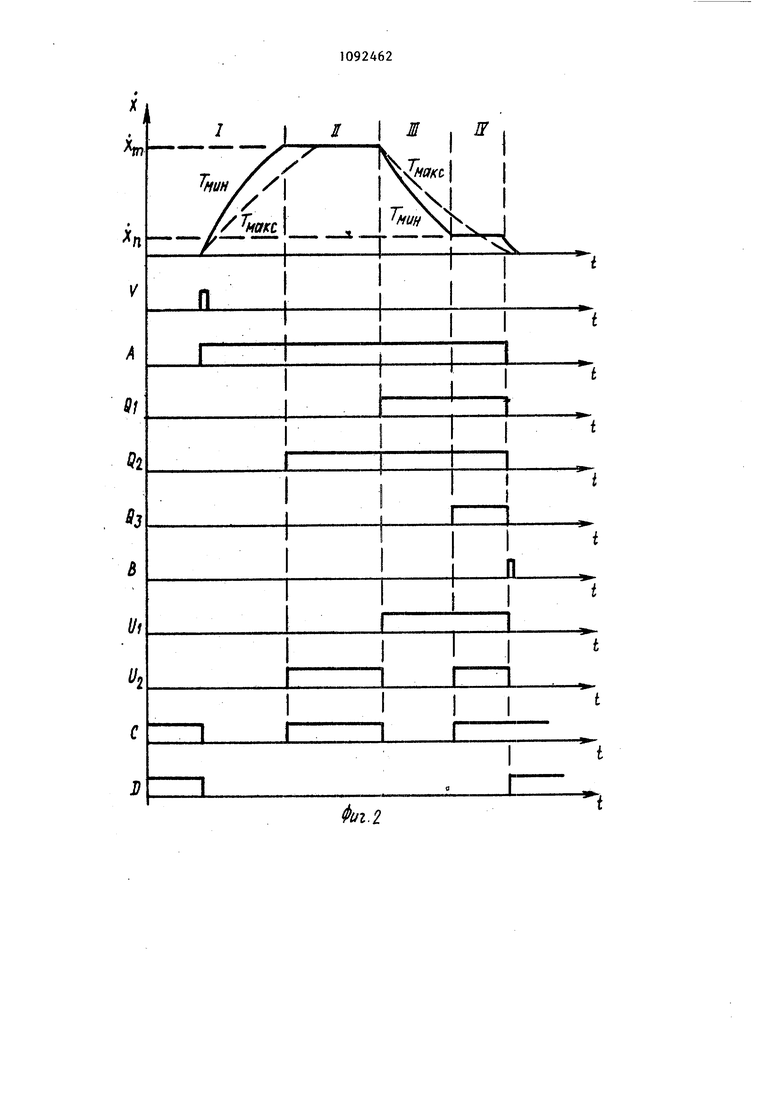
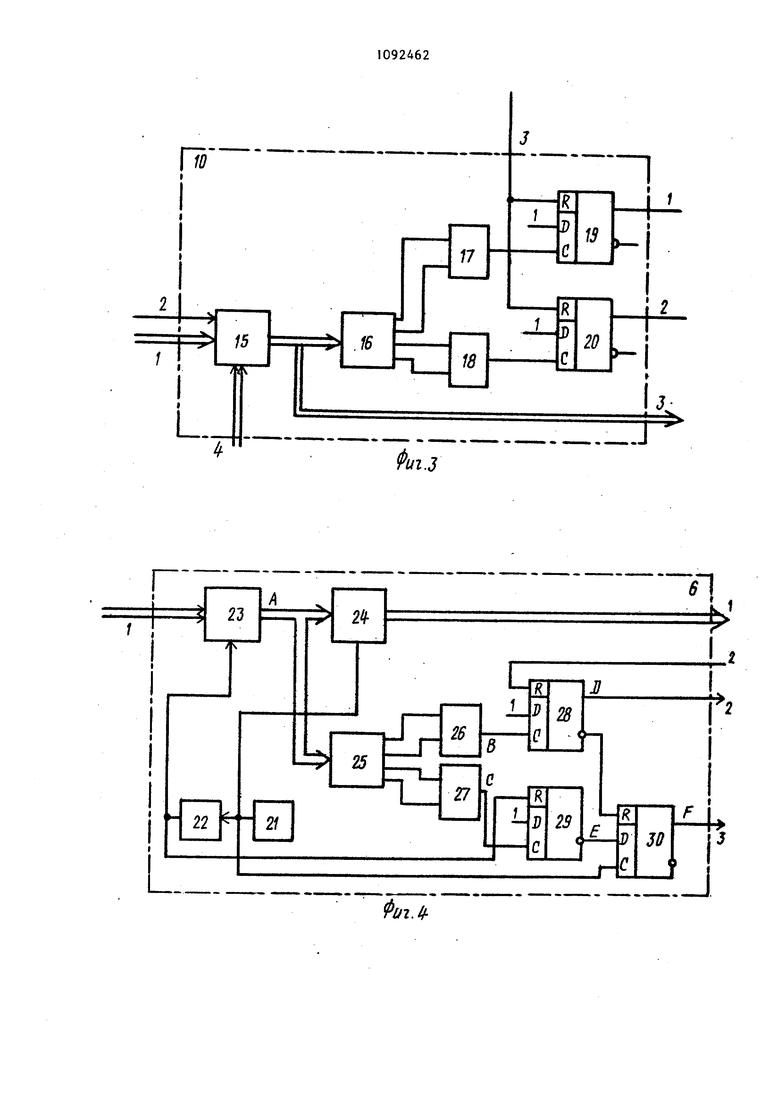
W - входные сигналы блоков (фиг.1); Т - соответственно минимальное и максимальное значения электромеханической постоянной (фиг.2); пер- Q вый реверсивный счетчик 15, дешифратор 16, первый и второй элементы ИЛИ 17 и 18 соответственно, второй и третий триггеры 19 и 20 соответственно (фиг.З); генератор 21, блок 22 задержки, второй реверсивный счетчик 23, регистр 24, второй дешифратор 25j третий и четвертый элементы ИЛИ 26 и 27 соответственно, четвертый, пятый и шестой триггеры 28,29 и 30 соответст622третьим входом устройства, третий вход - с выходом датчика положения, четвертый вход - с первым выходом триггера, второй выход - со вторым входом первого ключа, а третий выход через формирователь импульса со вторым входом триггера. Кроме того, второй блок срав- нения содержит второй элемент ИЛИ, второй триггер и последовательно соединенные реверсивный счетчик, дешифратор, третий элемент ИЛИ и третий триггер, второй выход дешифратора подключен ко второму входу третьего элемента ШШ, третий и четвертый выходы - соответственно к первому и второму входу второго элемента ШШ, Выходом соединенного с первым входом второго триггера, первый выход второго блока сравнения подключен к выходу третьего триггера, второй выход - к выходу реверсивного счетчика, третий выход - к выходу второго триггера, первый, второй и третий входы - к соответствующим входам, реверсивного счетчика, а четвертый вход - ко вторым входам второго и третьего триггеров. На фиг, 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - временные диаграммы его работы; на фиг.З - функциональная схема второго блока сравнения; на фиг.4 - то же, преобразователя скорости; на фиг. 5 - то же, первого блока сравнения. Схема устройства содержит первый ключ 1, первый блок 2 сравнения, усиитель 3, двигатель 4, датчик 5 полоения, преобразователь 6 скорости, второй ключ 7, первый триггер 8, элеент И 9, второй блок 10 сравнения, блок 11 памяти, шифратор 12, формирователь 13 импульса, элемент ИХШ 14,
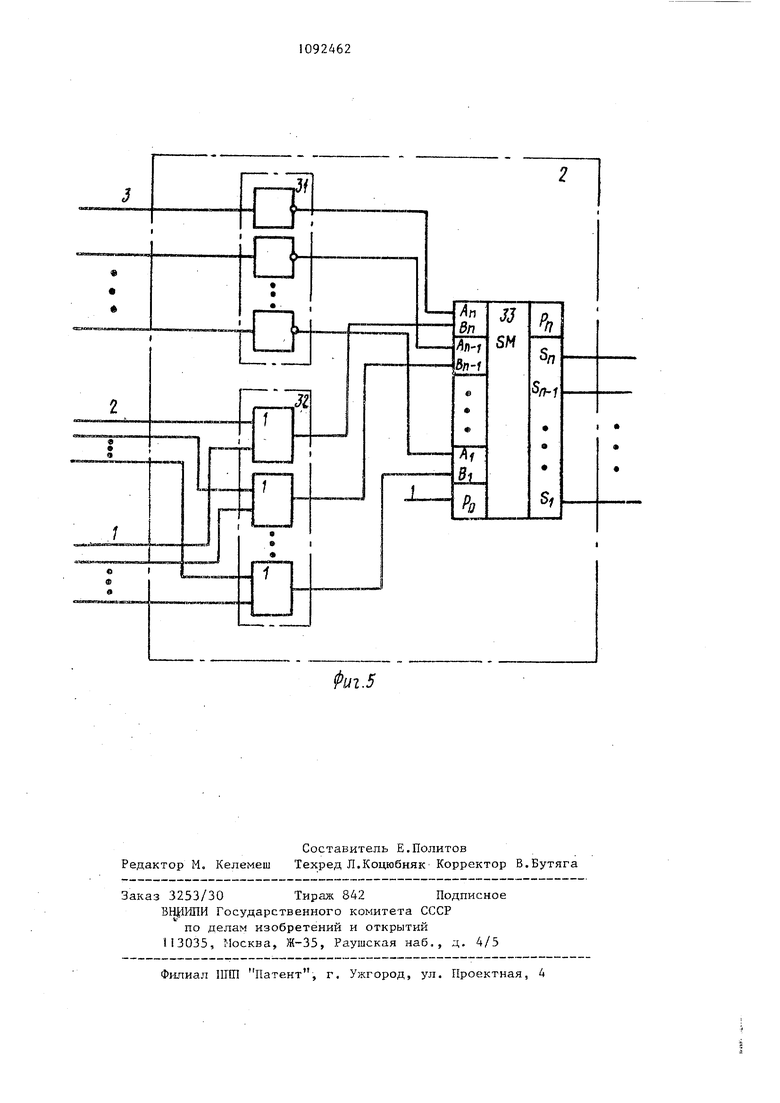
венно(фиг.4);блок 31 инверторов,блок элементов ИЛИ 32,сумматор 33(фиг.5).
Устройство работает следующим образом.
Входными сигналами являются сигнал задания Хз оп,а также сигналы V и W, формируемые функциональными элементами системы управления верхнего уровня, в которой используется данное устройство.
Траектория отработки задания состоит из четырех участков (фиг.2).
При включении напряжения питания на выходе формирователя I3 импульса формируется короткий импульс, устанавливающий триггер 8 в нулевое состояние, что соответствует подаче разрешающего уровня на вторые входы первого и второго ключей 1 и 7 и запрещает прохождение кода с выхода блока 11 памяти через элемент И 9 на второй вход блока 2 сравнения. При этом триггеры 19 и 20 блока 10 и второй и третий выходы преобразователя 6 скорости удерживаются в нулевом состоянии.
Начало отработки задания (Х, положительное ) соответствует подаче сигнала V и сигнала W записи входного кода реверсивный счетчик 15. При этом триггер 8 переходит в единичное состояние. Первый ключ 1 и второй ключ 7 закрыты.
При отработке входного воздействия импульсы с выхода датчика 5 положения 4 поступают на вычитающий вход реверсивного счетчика 15, уменшая тем самым значение кода на его выходах.
На первом интервале управления (tg, t ) t определяется моментом достижения текущей скоростью значения на выходах шифратора 12 в соответствии с реализуемыми логическими функциями будут нулевые уровни Комбинация всех нулей на первом, втором и третьем адресных входах блока 11 соответствует тому, что на его выходе появляется код сигнала (X,), который через элемент И 9 поступает на второй вход блока 2. Так как ключи 2 и 7 закрыты, то этот сигнал без изменения поступает на вход усилителя 3, в котором входной код, представленный в дополнительном коде, преобразуется длительность импульса и усиливается Причем знаковый разряд кода и д |Однозначно определяет направление вращения двигателя 4, разрешая прохождение модулированного импульса в требуемую диагональ усилителя 3.
Таким образом, интервал (t,t) соответствует участку максимального разгона двигателя 4. При малых значениях электромагнитной постоянной времени динамика привода описывается рифференциальным уравнением
Mt)(t)(t),iu(t)Uu-;.
зм win moxj Поэтому для перевода его из ссх:тояния в состояние X Х требуется один интервал управления.
В момент достижения текущей скоростью значения x на втором выходе преобразователя 6 скорости появляется единичный уровень в соответствии с логическими функциями, реализуемыми шифратором 12 и О, U2 1. Это соответствует тому, что на выходе блока 11 появля5 ется код , второй вход второго ключа 7 подан разрешающий уровень. Таким образом, на интервале (t, t) устройство работает в режиме стабилизации скорости Х.
0 Момент t2 окончания участка движения с постоянной скоростью определяется в блоке IО при выполнении условия X Х, где Х - путь торможения, обеспечив аю1чий оптимальные по
5 быстродействию процессы в случае Та..
ttiox и определяется как
t
тсях
),
л
1-е
max
,с,х 2
М
т
Это соответствует тому, что на третьем выходе дешифратора 16 появляется короткий импульс, который через элемент ИЛИ 18 устанавливает триггер 20 в единичное состояние. При этом на выходах шифратора 12 име0 2 О, что соответствует появлению на вых-оде блока 1 1 кода ; подаче запрещающего уровня на второй вход второго ключа 7. Сигнал через элемент И 9 и блок 2 поступает на усилитель 3, обеспечивая на интервале (t,, t) режим динамического торможения.
Длительность интериала торможения (t-,t,,) фиксируется в преобразователе 6 скорости и определяется моментом достижения скорости величины пол зучей скорости Х . Это соответствует появлению на третьем выходе преобразователя 6 скорости единичного уровня, что обусловливаетлоявление двух единиц на вькоде шифратора 12 (и 1, и, I). На второй вход ключа 7 подан разрешающий уровень, а на выходе блока 11 появляется сигнал интервале (t, t) . система работает в режиме стабилизации скорости Хр, обеспечивая плавный подход к точке позиционирования. Дли тельность этого интервала зависит от электромеханической постоянной времени Т,. При Тд Т режим ползу Чих скоростей может отсутствовать. Момент t определяется вхождением устройства в некоторую окрестность точки позиционирования Х,. Это соответствует появлению короткого импульса на первом выходе дешифратора 16, который череэ элемент ИЛИ 17 устанавливает триггер 19 в единичное состояние. В момент появле ния разрешающего уровня на первом выходе блока 10. триггер 8 через формирователь 13 переводится в нулевое состояние. При этом на вторые входы первого и второго ключей 1 и 7 подается разрешающий уровень, триггеры 19 и 20 блока 10 и второй и тре тий выходы преобразователя 6 скорости переводятся в нулевое состояние. На первьй вход элемента И 9 подан нулевой уровень, запрещающий npof хождение сигнала с выхода блока 11 на блок 2. В дальнейшем устройство работает как линейная система под действием сигналов скоростной и позиционной обратной связи. При работа устройства аналогична, с той лишь разницей, что выполнение условий Хд- X Х и X, -Х Хд фиксируется появлением коротких импульсов соответственно на четвертом и втором выходах дешифратора 16, а импульсы от датчика 5 положения поступают на суммирую1ций вход реверсивного счетчика 15. Применение предложенного i устройства для управления приводами промьшшенных роботов, у которых изменение электромеханической постоянной времени незначительно во всем диапазоне нагрузок (выдвижение руки, подъем руки ), позволяет получить процессы, близкие к оптимальным по быстродействию, и обеспечивает высокую точность. При управлении приводами роботов, у которых постоянная времени изменяется в значительных пределах в зависимости от расположения в пространстве последующих звеньев кинематической цепи (поворот руки ), устройство обеспечивает апериодические переходные процессы при сохранении высокого быстродействия и точностио
Фиг. IfФиг.5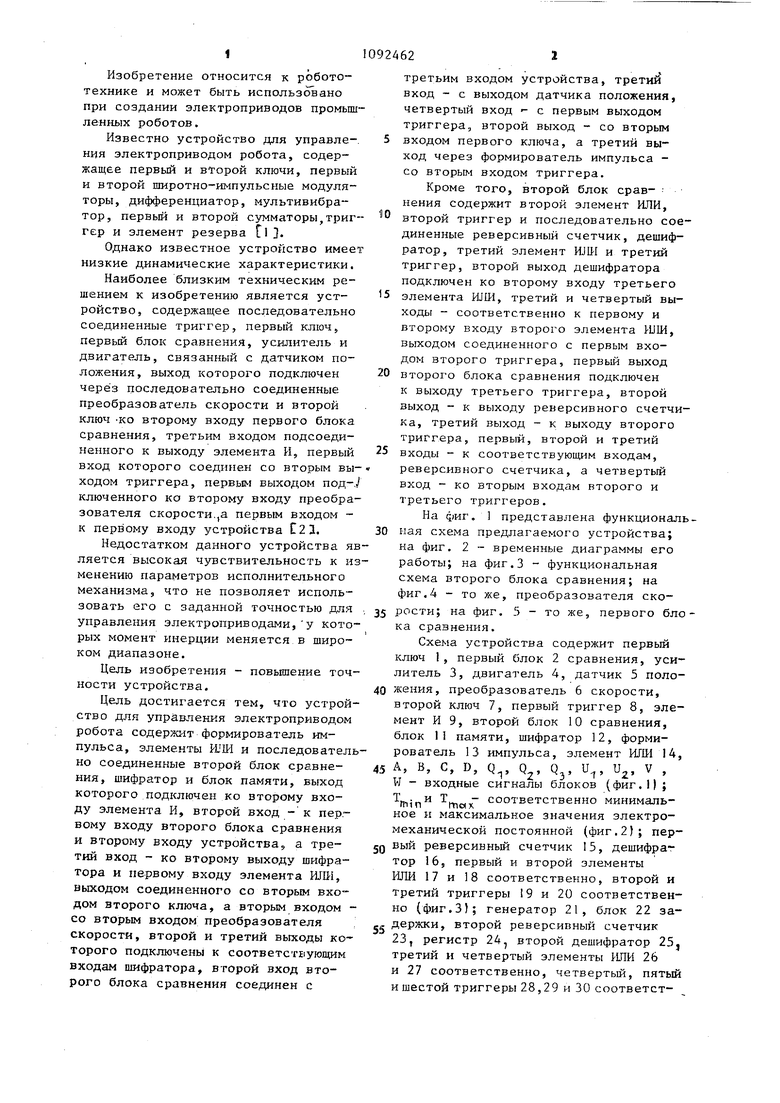
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом робота | 1985 |
|
SU1257608A1 |
| Устройство для определения кратчайшего пути на графе | 1983 |
|
SU1134944A1 |
| Устройство для трассировки межсоединений | 1984 |
|
SU1208560A1 |
| Аналого-цифровое делительное устройство | 1979 |
|
SU886017A1 |
| Цифровой измеритель параметров комплексного сопротивления | 1989 |
|
SU1732292A1 |
| Генератор с управляемой частотой следования импульсов | 1984 |
|
SU1193785A1 |
| Устройство для прогнозирования постепенных отказов | 1978 |
|
SU767709A1 |
| Устройство аналого-цифрового преобразования узкополосных сигналов | 1984 |
|
SU1225014A1 |
| Генератор случайных временных интервалов | 1978 |
|
SU746482A1 |
| Устройство для ввода информации | 1984 |
|
SU1247855A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ РОБОТА, содержащее последовательно соединенные первьй триггер, первый ключ, первый блок сравнения, усилитель и двигатель, связанньй с датчиком положения, выход которого подключен через последовательно соединенные преобразователь скорости и второй ключ ко второму входу первого блока сравнения, подсоединенного, третьим входом к выходу элемента И, первый вход которого соединен со вторым выходом триггера, подключенного первым выходом ко второму входу преобразователя ско-;., рости, а первым входом - к первому входу устройства, отличающееся тем, что, с целью повышения точности устройства, оно содержит формирователь импульса, элементы ШШ и последовательно соединенные второй .блок сравне1шя, , шифра тЬр , и блок памяти , выход которого подключен ко второму входу элемента И, второй вход - к первому входу второго блока сравнения и второму входу устройства, а третий вход - ко второму выходу шифратора и первому входу элемента ИЛИ, выходом соединенного со вторым входом второго ключа, а вторым входом - со вторым входом преобразователя скорости, второй и третий выходы которого подключены к соответствующим входам шифратора, второй вход второго блока сравнения соединен с третьим входом устройства, третий вход - с выходом датчика положения, четвертый вход - с первым выходом триггера, второй выход - со вторым входом первого ключа, а третий выход через формирова§ тель импульса - со вторым входом триггера. 2. Устройство по П.1, о т л и чающееся тем, что второй блок сравнения содержит второй элемент ИЛИ, второй триггер и последовательно соединенные реверсивный счетчик, дешифратор, третий элемент ИПИ и третий триггер, второй выход -деСО шифратора подключен ко второму вхокэ ду третьего элемента ШШ, третий и четвертый выходы - соответственно к первому и второму входу второго элеto мента ШШ, выходом соединенного с первым входом второго триггера, первый выход второго блока сравнения подключен к выходу третьего триггера, второй выход - к выходу реверсивного счетчика, третий выход - к выходу второго триггера, первый, второй и третий входы - к соответствующим входам реверсивного счетчика, а четвертый вход - ко вторым входам второго и третьего триггеров.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Регулятор | 1979 |
|
SU830299A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор | 1980 |
|
SU926615A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
