Изобретение относится к контрольно-измерительной технике и может быть использовано для автоматического контроля исправности импульсных датчиков углового положения в процессе их эксплуатации.
Целью изобретения является повышение достоверности контроля, осуществляемого в процессе эксплуатации датчика, углового положения, и расширение области применения за счет обеспечения контроля импульсных датчиков углового положения.
На фиг. 1 представлена структур10
поворота вала контролируемого датчика. С приходом N-ro импульса все разряды счетчика 4 устанавливаются в нуль, а с целью предохранения от сбоев на установочный вход Б счетчика 4 через инвертор 3 поступает также импульс НО, дублирующий установку счетчика 4 в нуль.
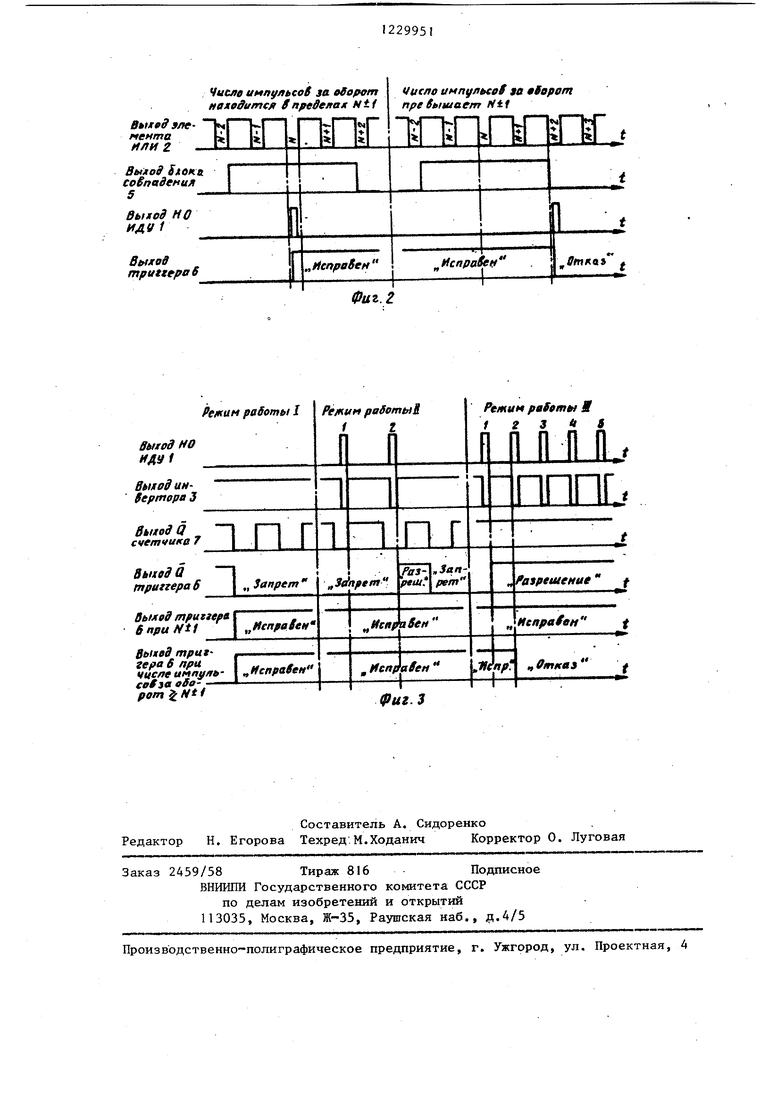
Блок 5 совпадения с помощью триггера 13 формирует на своем выходе логическую единицу, начиная с момента появления заднего фронта (N-2)-го импульса и заканчивая моментом появления переднего фронта (N+2)-ro имва при формировании сигнала Исправен.
ная схема устройства; на фиг. 2 и 3 - 15 пульса (фиг. 2). При появлении зад- временные дйаграм№1 работы устройст- него фронта (N-2)-ro импульса логический нуль с выхода элемента И 12 устанавливает выход триггера 13 ш состояние логической единицы.Элемент 20 И-НЕ 10 формирует на своем выходе логическую единицу, запрещающую поступление импульсов на счетный вход С триггера 13 с выхода элемента
30
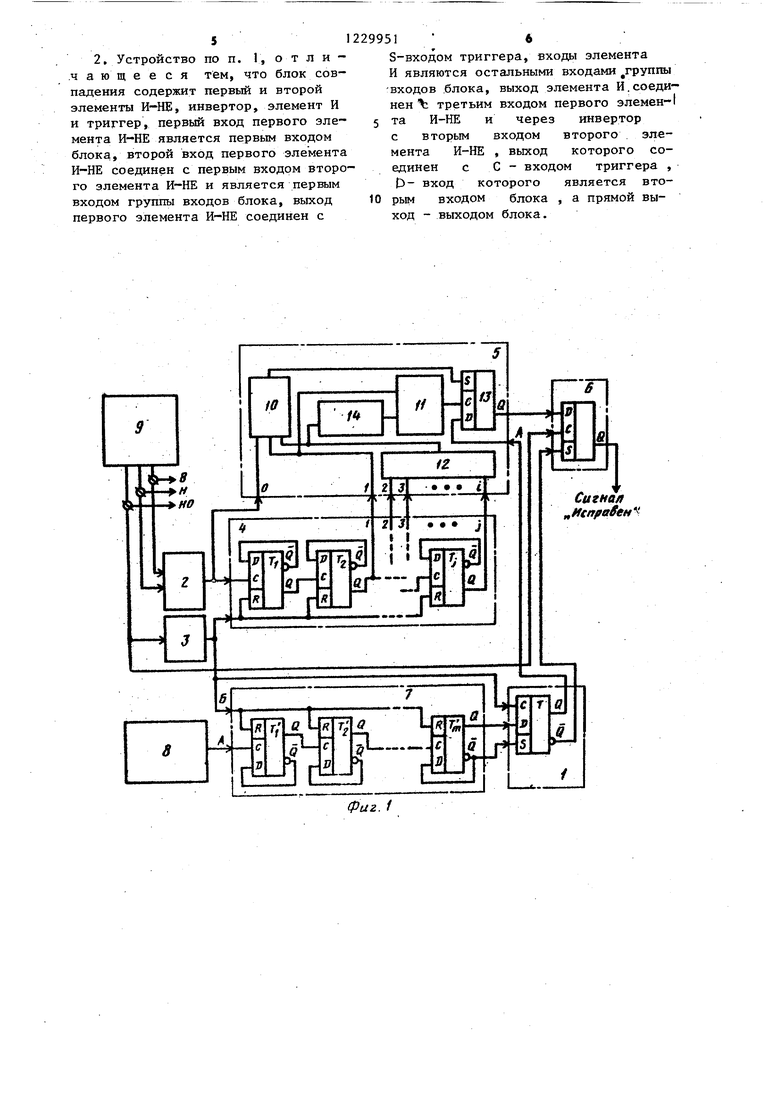
Устройство для контроля датчиков углового положения содержит триггер 1, элемент ИЛИ 2, инвертор 3, счетчик 4, блок 5 совпадения, триггер 6, счетчик 7, генератор 8 тактовых импульсов, входы элемента ИЛИ 2 и вход -с инвертора 3 соединен с-контролируемым датчиком 9, блок 5 совпадения выполнен в виде элементов И-НЕ 10 и 11, элемента И 12, триггера 13 и инвертора 14.
Устройство работает следующим образом.
На один из счетных выходов (В или Н) контролируемого датчика 9 поступает N±1 импульсов, где N - номинальное число импульсов 3 оборот с выходов в и Н контролируемого датчика 9; ±1 допустимая погрешность, а на выход НО - один импульс 3 оборот при любом направлении вращения.
Наличие на выходе триггера 6 логической единицы свидетельствует об исправности контролируемого датчика 9, т.е. о наличии N±1 импульсов за оборот по работающему в данный момент счетному каналу (В или Н); наличие на выходе триггера 6 логического нуля свидетельствует о-. том, что фактическое число импульсов за оборот менее числа N-1 или более числа N+1, т.е. свидетельствует об отказе контролируемого датчика 9.
Импульсы с одного из счетных выходов контролируемого датчика 9 через элемент ИЛИ 2 поступают на счет-
И 1 1.
40
При исправном состоянии контролируе МО го датчика 9 передний фронт импульса НО поступает на тактовый вход С триггера 6 тогда, когда на входе D триггера 13 присутствует логическая единица с выхода Q триггера ,1. В результате на-выходе триггера 6 появляется логическая единица - сигнал Исправен. При отсутствии на входе D триггера 6 логической единицы им пульс НО устанавливает выход триггера 6 в состояние логического нуля, что соответствует отсутствию сигнала Исправен и свидетельствует об отказе контролируемого датчика (фиг. 3, режим работы Ш).
Импульс НО с выхода инвертора 3 в каждом цикле работы устройства устанавливает-счетчик 7 в нуль. кость счетчика 7 выбирается такой, что при наименьшем значении частоты заданного диапазона частоты вращения вала контролируемого датчика 9 импульс НО производит сброс счетчика 7 в нуль до его переполнения.
50 При этом с выхода счетчика 7 на
вход D триггера 1 поступает логическая единица и команда с триггера 1 на вход триггера 6 о задержке его работы на один импульс НО не поступает.
45
55
ный вход А счетчика 4, имеющего коэф- цифиент деления N. Цикл работы счетчика 4 повторяется каждые 360 угла
поворота вала контролируемого датчика. С приходом N-ro импульса все разряды счетчика 4 устанавливаются в нуль, а с целью предохранения от сбоев на установочный вход Б счетчика 4 через инвертор 3 поступает также импульс НО, дублирующий установку счетчика 4 в нуль.
Блок 5 совпадения с помощью триггера 13 формирует на своем выходе логическую единицу, начиная с момента появления заднего фронта (N-2)-го импульса и заканчивая моментом появления переднего фронта (N+2)-ro имИ 1 1.
При исправном состоянии контролируе-- МО го датчика 9 передний фронт импульса НО поступает на тактовый вход С триггера 6 тогда, когда на входе D триггера 13 присутствует логическая единица с выхода Q триггера ,1. В результате на-выходе триггера 6 появляется логическая единица - сигнал Исправен. При отсутствии на входе D триггера 6 логической единицы импульс НО устанавливает выход триггера 6 в состояние логического нуля, что соответствует отсутствию сигнала Исправен и свидетельствует об отказе контролируемого датчика (фиг. 3, режим работы Ш).
Импульс НО с выхода инвертора 3 в каждом цикле работы устройства устанавливает-счетчик 7 в нуль. кость счетчика 7 выбирается такой, что при наименьшем значении частоты заданного диапазона частоты вращения вала контролируемого датчика 9 импульс НО производит сброс счетчика 7 в нуль до его переполнения.
При этом с выхода счетчика 7 на
вход D триггера 1 поступает логическая единица и команда с триггера 1 на вход триггера 6 о задержке его работы на один импульс НО не поступает.
Проверка исправности контролируемого датчика может происходить только при вращении его вала, при этом
вращение должно происходить с qacfo- той, не меньшей заранее установленной величины, с тем, чтобы требуемая емкость счетчика 7 не оказалась чрез мерно большой. Поэтому при останов- ке вала контролируемого датчика 9 или вращении его с частотой ниже установленного наименьшего значения на выходе триггера 6 предусмотрено появление сигнала Исправен, так как его отсутствие в этом случае может оказаться ложной информацией .
В этом случае устройство работает следующим образом.
При невращающемся вале контролируемого датчика 9 и включении устройства на выходе триггера 6 сигнал Исправен отсутствует. Начиная с момента включения устройства, так- товые импульсы с выхода генератора 8 поступают на счетный вход счетчика 7 и спустя некоторое время переполняют его, при этом логический нуль с выхода Q счетчика 7 поступает на установочный вход S триггера 1. В этом случае на выходе Q триггера 1 появляется логический нуль, кото- устанавливает выход триггера 6 в состояние логической единицы, что соответствует сигналу Испр авен который свидетельствует в этом режиме работы контролируемого датчика 9 лишь об исправности генератора 8, счетчика 7 и триггера 1 (фиг.З, ре- жим работы Т) .
При вращении вала контролируемого датчика 9 с частотой ниже минимальной счетчик 7 переполняется раньше момента, когда импульс НО, поступаю- щий с выхода инвертора 3, устанавливает его в нуль. В этом случае триггер I не изменяет своего состояния до тех пор, пока частота вращения контролируемого датчика 9 не достиг нет минимальной величины. При этом состояние триггера 6 также не меняется и сигнал Исправен продолжает оставаться на его выходе (фиг. 3, режим работы П).
После начала вращения вала контролируемого датчика 9 с частотой не менее минимально заданной счетчик 7 не успевает переполняться в течение промежутка времени между двумя им- пульсами НО и на инверсном выходе 5 триггера 1 появляется логическая единица, чем через триггер 1, осуществляющий задержку на один импуль НО, снимается запрет на прохождение этого сигнала на вход S триггера 6 (фиг. 3, режим работы Ш).
Необходимость задержки работы триггера 6 на один импульс НО обусловлена тем, что вращение вала контролируемого датчика 9 может начаться с произвольного положения, а не с импульса НО, и в этом случае число сосчитанных импульсов оказывается меньшим числа N-1, что приводит к ложному пропаданию на выходе триггера 6 сигнала Исправен.
Устройство может быть использовано для контроля импульсных датчиков при их повороте Яа угЬл, меньший 360, что зависит от числа импульсов нулевого отсчета за оборот вала датчика.
Формула изобретения
I. Устройство для контроля датчика углового положения, содержащее генератор тактовых импульсов, инвертор, первый счетчик, первый и второй триггеры, о т л и ч а ю щ е е с я тем, что, с целью повьшгения достоверности контроля и расширения области примене1шя путем обеспечекня контроля импульсных датчиков углового положения, в него введены элемент ШШ второй счетчик и блок совпадения, выход генератора тактовых импульсоз соединен со счетным входом первого счетчика, прямой и инверсный выходы которого соединены соответственно с D и S-входами первого триггера вход инвертора и первый и второй входы элемента ИЛИ являются входамн устройства, выход инвертора соединен с входами установки О первого и второго счетчнков и С входом первого триггера, выход элемента ИЛИ соединен со счетгаом входом второго счетчика л першлм вкодом блока совпадения, выходы второго счетчика соединены с группой входов блока совпадения, прямой выход первого триггера соединен с вторым входом блока совпадения, выход которого соединен с D-входом второго, триггера, С-вход которого соединен с входом инвертора, S-вход - с инверсным выходом первого триггера, а выход .Q является вьЬсодом устройства.
51
2, Устройство по п. 1, о т л и - .чающееся тем, что блок совпадения содержит первый и второй элементы И-НЕ, инвертор, элемент И и триггер, первый вход первого элемента И-НЕ является первым входом блока, второй вход первого элемента И-НЕ соединен с первым входом второго элемента И-НЕ и является первым входом группы входов блока, выход первого элемента И-НЕ соединен с
to
1±
8
Ы-
J
t
П
8
о
29951 6
S-входом триггера, входы элемента И являются остальными входами группы входов .блока, выход элемента И.соединен Ч: третьим входом первого элемен-1 5 та И-НЕ и через инвертор с вторьпу входом второго элемента И-НЕ , выход которого соединен с G - входом триггера , D- вход которого является вто- 10 рым входом блока , а прямой выход - выходом блока.
11
г
13
а
/г
21 J ЧПС3
гЫ j
I I I -I
I
ел
4Р
т
S
1
Сигнал „/fffr/rafff/
7
а
а
IG
ru
в
Фиг. i
Числе имаульсоб за. cdofwm находится f п едепая N±1
-
1ПЛ
mr
Выл off StOKK.
Совпадения S-
Выход HO ИДУ1
Btfixo9 mputtepaS
Составитель A. Сидоренко Редактор Н. Егорова Техред.М.Ходанич Корректор О. Луговая
Заказ 2459/58 Тираж 816Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Число uHnyn ot to tiapom пре бышает H t
in
trorr.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для проверки исправности кабеля | 1986 |
|
SU1396096A1 |
| УСТРОЙСТВО КОНТРОЛЯ ТОЧНОСТИ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА | 2015 |
|
RU2577186C1 |
| Информационное устройство | 1987 |
|
SU1564066A1 |
| Устройство для контроля радиоэлектронной аппаратуры | 1984 |
|
SU1182541A1 |
| Устройство контроля импульсной последовательности | 1983 |
|
SU1167520A1 |
| Устройство для контроля исправности объекта | 1987 |
|
SU1495817A1 |
| Устройство для контроля реверсивного счетчика | 1973 |
|
SU444186A1 |
| Оперативное запоминающее устройство с самоконтролем | 1986 |
|
SU1325571A1 |
| Устройство для коррекции числа импульсов по параметру | 1984 |
|
SU1228118A1 |
| Устройство для контроля цифровых блоков | 1982 |
|
SU1075394A1 |
Изобретение предназначено для автоматического контроля исправности датчиков углового положения с повышенной достоверностью контроля, осуществляемого в процессе эксплуатации датчиков углового положения. и расширения области применения пу-. тем обеспечения контроля импульсньпс датчиков положения. Для этого .в устройство для контроля датчика углового положения, содержащее генератор тактовых импульсов, инвертор, первый счетчик, первый и второй триггеры, введены элемент ИЛИ, второй счетчик и блок совпадения. Первым счетчиком определяется количество импульсов, поступающих с выхода импульсного датчика за один оборот его вала. С помощью второго счетчика контролируется время, в теяение которого заполняется первый счетчик. С помощью бло- Q ка совпадения, первого и второго триггеров анализируется состояние счетчиков и на выходе первого триггера формируется сигнал исправности или неисправности контролируемого импульсного датчика. 1 з.п.ф-лы, 3 ил. $ (Л
| Устройство для контшля цифровых датчиков | 1977 |
|
SU622060A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля датчика положения | 1975 |
|
SU553596A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
