1
Изобретение относится к грузоподъемным механизмам и может быть ис пользовано для погрузочно-разгрузоч- йых работ.
Цель изобретения - увеличение грузоподъемности и расширение зоны обслуживания
На фиг. 1 схематически показаны положения манипулятора при подъеме и опускании груза; на фиг. 2 - то же, при горизонтальной подаче груза}
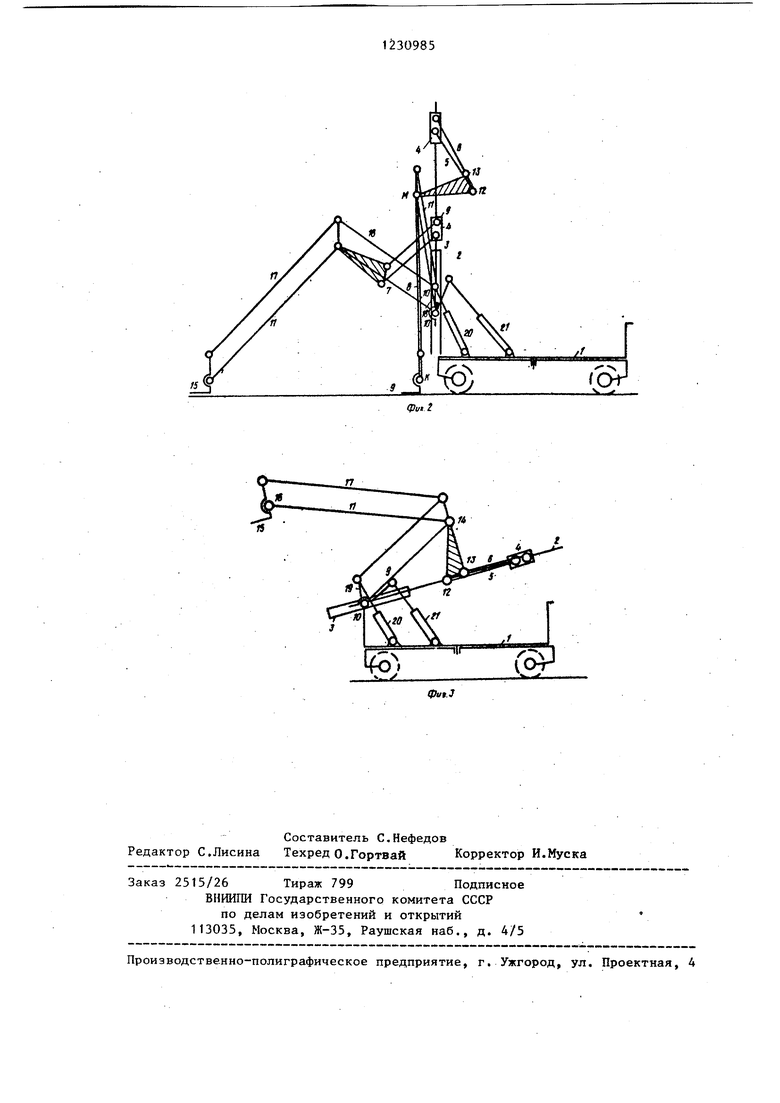
на фиг. 3 - то же, при захватывании груза из промежуточной зоны.
Стрела содержит поворотную раму 1, подвижное основание с упором 2, гидроцилиндр 3, ползун 4,.перемещающийся вдоль подвижного основания, шатуны 5 и 6, соединенные одними концами шарнирами 7 и 8 с ползуном, коромысло 9, связанное шарниром 10 с поворотной рамой, стреловой четьфех- шарнирный хобот 11, соединенный шарнирами 12 и 13 с другими концами шатунов, шарниром 14 - с коромыслом, рабочий орган 15, связанный шарниром 16 со стреловым хоботом и удерживаемый там параллелограммным механизмом состоящим из стержней 17 и 18, и основание 19 с независимым приводом - гидр о цилиндр ом 20, гидрощшиндр 21, являющийся приводом подвижного основания.
Манипулятор работает следующим образом.
При подъеме и опускании груза двц жение от штока гидроцилиндра 3 передается палзуну 4 и его шарнирам 7 и 8, через которые с помощью шатунов 6 и 5 - шарнирам 12 и 13 стрелового хобота 11 и шарниру 14 коромысла 9. Плоскопараллельное перемещение стрелового хобота обеспечивает прямолинейное перемещение шарнира и рабочего органа 15, удерживаемого, в вертикальном положении.параллелограммным механизмом, состоящим из стержней 17
12
230985
и основания 19. Положение вил рабочего органа 15 изменяется незави-- симо от положения звеньев схемы ме- хайизма путем изменения позиции ос- 5 нования 19 гидроцилиндром 20. . При горизонтальной подаче груза подвижное основание 2 с помощью гидроцилиндра 21 поворачивается на угол 90 до упора на поворотной раме. О При этом поворачиваются все элементы параллелограммного механизма вместе с подвижным основанием относительно шарнира 10, и шарнир 16 стрелы хобог
та 11 опускается еще ниже, а вилы рабочего органа 15 опускаются до уровня пола, сохраняя горизонтальное положение. Путем перемещения ползу - на 4 сверху вниз относительно подвижного основания 2 цилиндром 3 осу
ществляется прямолинейное горизонтальное перемещение рабочего органа с грузом. При этом вес груза и консольный вес элементов манипулятора воспринимается опорной поверхностью пола.
При захватывании груза из промежуточной зоны подвижное основание 2 занимает горизонтальное положение. Гидроцидиндром 3 ползун 4 перемещается справа налево до тех пор, пока вилы рабоего органа не поднимаются до нужной высоты. Гидроцилиндром 21 поворачивают подвижное основание 2 относительно шарнира 10. При этом рабочий орган вьщвигается вперед и приближается к захватывающему грузу. Гидроцилиндром 20 изменяется положение основания параллелограмма 19 в ту или другую сторону в зависимости от рриентации груза. Совместным движением гидроцилиндров 20 и 21 осуществляется захват груза. Подвижное основание опускается в исходное положение дальнейшее,манипулирование груза осуществляется согласно прин
ципу работы манипулятора.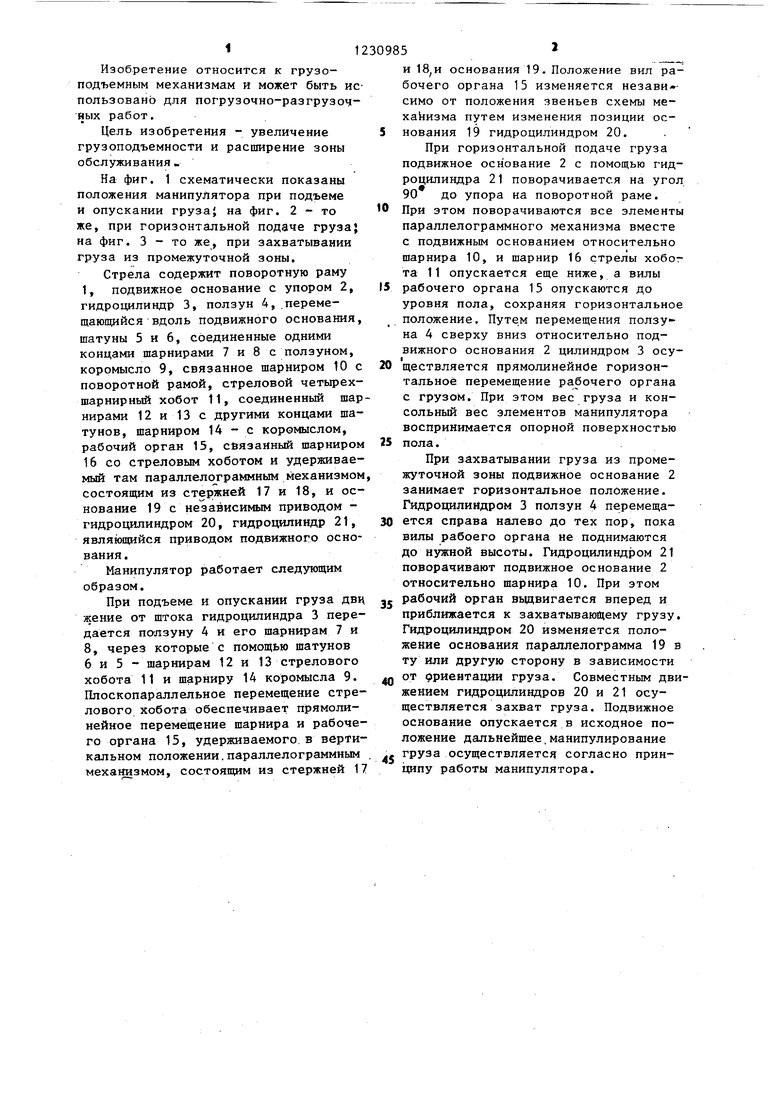
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
| Механизм подъема стрелы манипулятора | 2015 |
|
RU2613203C1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Грузоподъемное устройство | 1988 |
|
SU1562298A1 |

J7
| Авторское свидетельство СССР № 830969, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
